МАГИСТЕРСКАЯ РАБОТА
Информационные технологии обеспечения пространственной
привязки объектов кадастровой съемки
Павельчак Татьяна Валентиновна
Как показывает опыт наиболее развитых стран, одним из ключевых моментов эффективной экономической политики является научно обоснованное землепользование, средством достижения которого является земельная реформа. Для эффективного управления земельными ресурсами и развития земельного рынка необходимо располагать достоверной и надежной информацией о земле. Ядром этой системы должен быть земельный кадастр, как методически упорядоченный государственный учет сведений об участках земли с уникальными интересами владения. В последнее время в нашей стране создана система областных и городских кадастровых центров, основной задачей которых является создание полноценной и достоверной кадастровой системы. Препятствием для эффективной работы в этой области является проблема однозначной пространственной привязки объектов землепользования и недвижимости, то есть определение или восстановление в пространстве границ прав и интересов владельцев. Для каждого такого участка землепользования проводится кадастровая съемка. Традиционно она происходит по такой схеме: построение опорной геодезической сети ®
Руководитель: д.т.н., проф. Могильный Сергей Георгиевич
® построение съемочной геодезической сети ®
® координирование точек поворота границ объекта кадастровой съемки.
Это есть так называемый “принцип от общего к частному”, при котором точность измерений снижается от этапа к этапу съемки (от измерения съемочного обоснования к определению координат точек поворота границ объекта). Тем самым снижаются трудозатраты, а, следовательно, и денежные расходы.
Попытаемся выделить недостатки вышеупомянутого принципа при проведении кадастровых работ. Развитие, сохранение и восстановление пунктов геодезического обоснования достаточной плотности – очень дорогое и сложное дело. А в большинстве случаях на сегодняшний день пункты геодезического обоснования нарушены в силу различных причин и не отвечают требованиям инструкции. В условиях недостаточного финансирования геодезической отрасли нашей страны эта задача вообще является проблематичной. На практике очень часто, в зависимости от потребностей заказчиков, проводится не сплошная кадастровая съемка, а выборочная съемка отдельных участков землепользования. В таких условиях неэффективно развитие дорогого геодезического обоснования. Поэтому координаты объекта кадастровой съемки часто определяют в условной системе, где основное внимание уделяется взаимному положению точек поворота границ этого объекта. Предполагается, что положение данного участка землепользования в общепринятой системе координат будет определено в последующем, по мере поступления средств и при дальнейшей съемке соседних участков. Такой подход весьма неэффективен.
Когда стоит задача свести воедино все участки землепользования, возникает масса проблем, связанных в неоднозначным определением координат точек поворота границ соседних участков. В итоге получается, что между соседними участками появляются разрывы или перекрытия. В этом случае общая площадь системы участков отличается от истинной площади контура, который они образуют. В землеустройстве недопустима подобная ситуация. Еще больше проблем она доставляет при создании больших автоматизированных земельных регистрационных систем.
В тоже время “принцип от общего к частному” был справедлив при использовании таких традиционных геодезических инструментов как теодолит, рейка, рулетка и т.п. Но в последнее время современные средства измерения предоставляют широкие возможности их использования, в том числе и при кадастровой съемке. Главное их достоинство в том, что они экономят время измерений и при этом дают высокую точность.
Можно назвать следующие современные средства измерений:
Эти средства позволяют нам практически одинаково точно (1-2 см) определить как точки хода обоснования, так и отдельные пикетные точки, что не соответствует “принципу от общего к частному”.
В данной работе предлагается нетрадиционное решение вышеописанных проблем пространственной привязки участков кадастровой съемки.
Чтобы обосновать предлагаемый метод, нужно выделить два предположения, при которых он имеет смысл:
Определение координат каждого участка выполняется локально в системе координат данного участка. Каждый участок представляет собой полигон. По мере того, как измеренные участки будут заполнять некоторую часть земной поверхности, они начнут соприкасаться и создавать условия для перевычисления их в некоторую единую систему координат, а затем и в государственную.
Сущность предлагаемой схемы пространственной привязки показана на рисунке 1 .
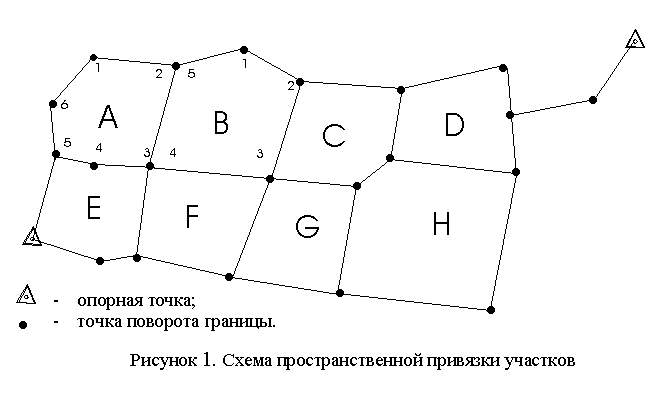
При наличии хотя бы двух опорных точек с известными координатами в ГГС можно перевычислить локальные координаты каждого участка в общегосударственную систему. Таким образом, теряется необходимость в построении и поддержании съемочного обоснования, разрешается проблема соответствия координат общих точек границ и проблема баланса площадей. Кроме разрешения этих проблем, происходит экономия как материальных, так и трудовых ресурсов по сравнению с традиционными схемами
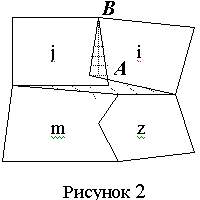
кадастровых съемок.Для опис ;ания теории ура внивания таких сетей необходи мо представить ситуацию: имеют ся четыре участ ка
i, j, m, z, коо рдинаты точек п оворота границ участков определены в разных системах, имеются опорные точки.Пусть для точки А координаты
: (ХjА,YjА), (ХiА,YiА), (ХmА,YmА), (ХzА,YzА).
Из-за погрешности измерений эти точки могут не совпадать. Тогда возникают перекрытия площадей участков (между участками
i и j) или пробелы (между участками j и m, i и z). Таким образом, возникает задача перевычислить координаты в одну систему, и уравновесить их значения, а следовательно, сбалансировать площади участков. Необходимо также найти, какие координаты точек определены с грубой ошибкой.Рассмотрим решение данной задачи.
Для перехода из одной системы координат в другую известны соотношения для точки :
Xk =Xo +t(Xn cosθ+Yn sinθ);
(1)
Yk =Yo +t(Yn cosθ-Xn sinθ),
где
Xo , Yo - начало координат системы n относительно системы k ;t-масштаб;
θ- угол поворота системы n относительно системы k .
Используем данное соотношение для точки А:
X(j)A = Xjo +aj XjA+ bj YjA;
Y(j)A = Yjo -bj XjA+ aj YjA,
X(i)A = Xio +ai XiA+ bi YiA;
Y(i)A = Yio –bi XiA+ ai YiA,
X(m)A = Xmo +am XmA+ bm YmA;
Y(m)A = Ymo –bm XmA+ am YmA.
X(z)A = Xzo +az XzA+ bz YzA;
Y(z)A = Yzo –bz XzA+ az YzA.
Неизвестные параметры для точки А
: Xjo , Yjo, aj, bj,Xio , Yio, ai, bi,
Xzo , Yzo, az, bz,
Xmo , Ymo, am, bm.
Если бы координаты точки А были определены без о шибок, то:
X(j)A = X(i)A = X(i)A = X(z)A ;
Y(j)A = Y(i)A = Y(i)A = Y(z)A.
Но фактически возникают невязки:
X(j)A -X(i)A = ν XA(i j);
Y(j)A -Y(i)A = νYA(i j),
X(j)A -X(z)A =ν XA(j z);
Y(j)A -Y(z)A = νYA(j z),
X(j)A -X(m)A =ν XA(j m);
Y(j)A -Y(m)A = νYA(j m).
Если точка А является общей для
n участков, то таких систем можно составить (n-1). Если точка А является опорной и значения ее координат определены в собственных системах координат n смежных участков, то можно составить n систем вида:X(q)A –XopA
=ν XA(q); (4)
Y(q)A –YopA = νYA(q),
где, q=1..n..
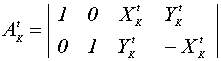
Запишем окончательный вид уравнений. Возьмем точку В, которая является общей для участка
i и участка j. Для точки В можно записать следующие параметрические уравнения:![]() (5)
(5)
![]()
Запишем эти уравнения через приближенные значения параметров и поправки к ним:
 (6)
(6)

В матричной форме:
 - матрица коэффициентов уравнений поправок;
- матрица коэффициентов уравнений поправок;
 - вектор поправок в приближенные значения параметров;
- вектор поправок в приближенные значения параметров;
 - вектор приближенных значений параметров;
- вектор приближенных значений параметров;
 - невязки в уравнениях;
- невязки в уравнениях;
где, t - номер участка, К- имя точки.
Для точки В:
 (7)
(7)
Можно составить такие уравнения для каждой рассматриваемой точки. Получится общая система уравнений
в общем виде:ν=A*ΔT+L. (8)
Данную систему можно решить двумя способами:
[
ν x[|νx |+ |νy|]=min (метод Лапласа). (10)
Решая систему (8) методом наименьших квадратов при условии (9), получаем систему нормальных уравнений, которую в матричной форме можно записать [2]:NΔT+ATPL=0, (11)
где, N=ATPA (12) - матрица коэффициентов нормальных уравнений,
Р - матрица весов.
Матрица весов принимается единичной.
Полученную систему нормальных уравнений решаем итерационным способом. Первоначально приближенные значения параметров берем равными нулю.
При решении системы (8) методом наименьших модулей при условии (10) используется вариационный метод решения
[3]. Составляется такая же система нормальных уравнений, как при использовании метода наименьших квадратов. Матрица весов при первой итерации принимается единичной. При первой итерации система решается методом наименьших квадратов. По полученным параметрам вычисляются невязки ν(0) в каждом уравнении. Составляется матрица весов 2x2 для каждой системы вида (7), где диагональные элементы – веса уравнения, которые принимаются равными: ; (13)
; (13)
 ,
,
где,
i - номер или имя пары точек, для которых составлены параметрические уравнения вида (7);j - номер итерации,
µ - средняя невязка по системе уравнений.Полученная матрица весов и поправки к параметрам d
Xto, d Yto, d at, d bt используются в следующей итерации. Решается система нормальных уравнений для итерации (j+1):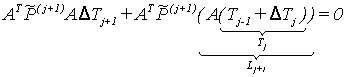 (14)
(14)
Находят матрицу весов и поправки, но уже к следующей итерации. Итерации продолжаются до тех пор, пока поправки к параметрам
a и b не будут меньше допустимой величины.Следует отметить, что, используя метод наименьших модулей, грубые ошибки локализуются и меньше искажают соседние участки. Это позволяет определить, в какой точке находится грубая ошибка.
В результате получаем неизвестные параметры
Xo , Yo, a, b для каждой точки, по которым можно вычислить уравненные координаты в одной общей системе координат. Осталось привести значения координат общих точек в разных участках к единым значениям.Это могут быть средние арифметические значения из уравненных координат для конкретной точки. При использовании метода наименьших квадратов:
 ; (15)
; (15)
 ,
,
где,
n-количество участков, на которых расположена эта точка.Если же использовался метод наименьших модулей, то определяется такие координаты
![]() (16)
(16)
![]()
где,
n-количество участков, на которых расположена эта точка.![]() и
и
![]() , удовлетворяющие условию (15), и будут необходимыми значениями координат. Если количество участков n – четное, то может возникнуть ситуация, что условию (15) соответствуют несколько значений
, тогда берется среднее из них.
, удовлетворяющие условию (15), и будут необходимыми значениями координат. Если количество участков n – четное, то может возникнуть ситуация, что условию (15) соответствуют несколько значений
, тогда берется среднее из них.
Согласно выше описанной теории, для пространственной привязки большого количества соседних участков требуется оперировать с матрицами большого порядка. Современная компьютерная техника позволяет достаточно легко решить такую задачу. Разработана программа AreaEqual, которая позволяет выполнять уравнивание сетей и приводить координаты съемок отдельных участков в единую систему. Если нет данных об опорных точках, то программа перевычисляет все полигоны в общую для всех локальную систему координат.
Исходными данными в программе для каждого участка землепользования служат:
Программа AreaEqual может быть представлена в виде выполнения следующих этапов:
Согласно выше описанной теории, для пространственной привязки большого количества соседних участков требуется оперировать с матрицами большого порядка. Современная компьютерная техника позволяет достаточно легко решить такую задачу. Разработана программа AreaEqual, которая позволяет выполнять уравнивание сетей и приводить координаты съемок отдельных участков в единую систему. Если нет данных об опорных точках, то программа перевычисляет все полигоны в общую для всех локальную систему координат.
Исходными данными в программе для каждого участка землепользования служат:
Программа AreaEqual может быть представлена в виде выполнения следующих этапов:
Нужно сказать, что данный модуль может дополняться новыми процедурами в зависимости от того, в каком виде представлены исходные данные, и какими методами они были получены. Например, если данные были получены в результате тахеосъемки точек поворота границ участка, то необходимо составить процедуру, которая бы вычисляла координаты углов границ участка в локальной системе координат участка.
Могут быть и уже готовые значения координат поворотных точек границ участков, но формат записи этих данных отличается от структуры данных, которая используется в программе. Тогда данные нужно преобразовать к удобочитаемому формату.
Эта задача возникает из-за того, что программа работает с большим количеством неизвестных и порядок нормальной матрицы также велик. Конкретный участок связан соседством не со всеми участками, только с некоторыми. Таким образом, полученная система нормальных уравнений является слабо заполненной (большинство коэффициентов равны “нулю”).
Необходимо найти такую рациональную последовательность участков, чтобы матрица коэффициентов нормальных уравнений имела вид, показанный на рисунке 3:
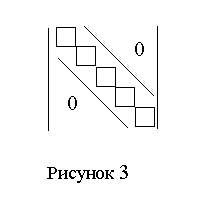
Элементы, отличные от нуля, будут стоять вдоль главной диагонали. В результате получается, что хранить нужно только элементы, отличные от нуля; матрицу адресов, в которой хранится старый номер участка, переместившегося на эту позицию; номер позиции, на которую переместился старый участок после сортировки; адрес диагонального элемента столбца в массиве субматриц коэффициентов нормальных уравнений; адрес первого ненулевого элемента столбца.
Система нормальных уравнений разбивается на субматрицы, такая субматрица выступает как единица хранения. Это можно показать на следующем примере.
Возьмем точку В, которая является общей для участка i и участка j.
Для точки В:
Заполняются матрицы AiB, и AjB, по исходным данным. Согласно N=ATPA вычисляются субматрицы для этих участков и заносятся в матрицу коэффициентов системы нормальных уравнений по адресам, которые соответствуют участкам
i и j. Таким же образом вычисляется вектор свободных членов системы нормальных уравнений, согласно ATPL.Заполнение субматриц происходит в зависимости от выбранного метода решения (МНК или МНМ) согласно вышеописанной теории.
Система нормальных уравнений уравнивается методом Гаусса.
Данную программу можно применять в следующих целях:
1) Имеются координаты углов поворота границ участков. Среди них могут быть опорные точки. Координаты углов измеряны в разное время разными способами в разных системах координат. В итоге, соседние участки могут накладываются друг на друга или вообще между ними могут быть пробелы из-за ошибок измерения. Используя программу можно привести координаты углов земельных участков в единую систему координат, при этом уравновесив их между собой, а следовательно и сбалансировав площади участков. Таким образом, получена целостная система увязанных между собой участков землепользования.
2) Допустим, при инвентаризации участков землепользования измерения производятся в собственных системах координат для каждого из них. Причем в качестве начала координат (0,0) в участке была взята любая удобная точка, а ось Х направлена в сторону одной из
вершин участка. Назовем эту систему координат “локальной”. Измерения проводились, например, электронным тахеометром (или другим способом). Можно легко вычислить координаты углов поворота границ участка в локальной системе координат по полученным измерениям, решая прямую геодезическую задачу. Достаточно иметь на территории инвентаризируемого района 3-4 опорных точки
3) Пусть имеются значения координат углов поворота границ для системы участков. Некоторые из координат определены с грубой ошибкой. Если воспользоваться методом наименьших модулей в программе, то можно локализовать эту ошибку. Если же воспользоваться методом наименьших квадратов, то ошибка распределится на все соседние участки и исказит координаты соседних точек. Таким образом, программа позволяет успешно решать задачу отбраковки грубых измерений.
Для иллюстрации работы программы рассмотрим несколько случаев уравнивания моделей различных сетей и проанализируем
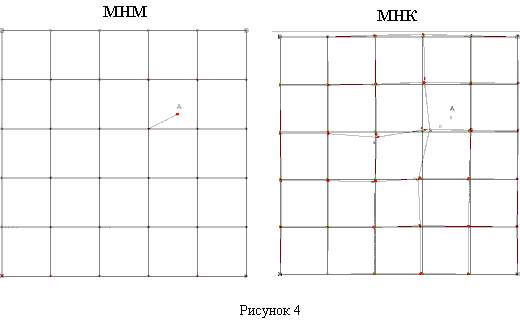
их.1. Сеть состоит из 25 полигонов, образующих квадраты. В четырех углах общего контура расположены опорные точки (рисунок 4).
Методом статистического моделирования исследовано накопление ошибок в сети. В локальные координаты каждой точки модели вводились случайные ошибки, распределенные по нормальному закону с математическим ожиданием, равным нулю, и стандартом s =0.05м. Модель такой сети уравнивалась по программе
AreaEqual, вычислялись оставшиеся истинные ошибки координат точек. По 100 подобным экспериментам найдены средние линейные ошибки ml положения каждой точки. Величины ml изображены в виде поверхности в перспективной проекции на рисунке 5.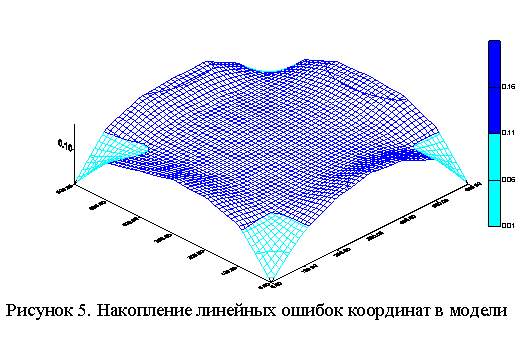
Статистические свойства погрешностей локальных координат таковы, что метод наименьших квадратов (МНК) не всегда обеспечивает оптимальное уравнивание, поэтому в программе
AreaEqual предусмотрена возможность решения системы нормальных уравнений методом наименьших модулей Лапласа (МНМ). МНМ позволяет эффективно выявить и локализовать грубые ошибки в исходных данныхНаглядная демонстрация вышесказанного представлена на рисунке 4. В координаты точки A'
искусственно вводится грубые ошибки. В целях эксперимента полученная модель уравнивается методом наименьших квадратов и методом наименьших модулей. На рисунке 4 четко видно, как исказились координаты точек всех соседних полигонов при использовании МНК. При использовании МНМ модель не исказилась, проявились лишь грубые ошибки lоординат точки A' .
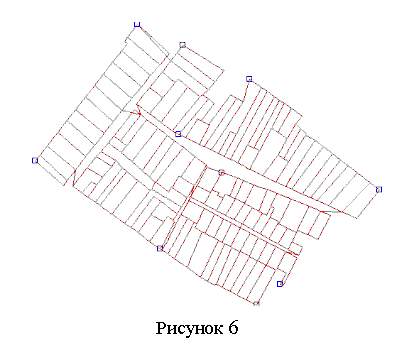
2.Теперь продемонстрируем работу программы на реальном объекте. Взят контур реально существующего села, состоящий из пяти кварталов и 114 участков землепользования ( рисунок 6), занимающих площадь » 45га. Известны локальные координаты каждого участка землепользования. Все кварталы можно легко увязать между собой. Для этого в исходные данные одного из участков
n квартала А вносятся координаты угла близлежащего участка g, расположенного в соседнем квартале В, в системе координат участка n. Эти данные одновременно получают при съемке участка n.В локальные координаты каждой точки участков вводятся случайные ошибки, распределенные по нормальному закону с математическим ожиданием, равным нулю, и стандартом s =0.05м.
При наличии четырех опорных точек на все пять кварталов, расположенных по краям общего контура, линейные ошибки положения каждой точки накапливаются в пределе от ± 0.05м до ± 0.45м. Такой точности не достаточно для практических целей. Следовательно, необходимо повысить количество опорных точек.
Накопление линейных ошибок координат менее существенно при 8-9 опорных точках .
Накопление ошибок зависит от расположения и количества опорных точек.
Желательно иметь опорную точку внутри контура и в его слабых местах на границе.
При девяти опорных точках накопление линейных ошибок в большей части сети не превышает
± 0.20м при погрешностях измерения координат ± 0.05м.
Таким образом, снижение накопления ошибок возможно за счет повышения количества
опорных точек и точности определения координат.
Целью дальнейшего исследования является более подробная разработка рекомендаций по
оптимизации геометрических конструкций сетей пространственной привязки кадастровых съемок.
Список литературы:
1. Могильный С.Г., Фотограмметрия. – К.: 1985.
2. Папазов М.Г., Могильный С.Г., Теория ошибок и способ наименьших квадратов. – М.: 1968.
3. В.И. Мудров, В.Л. Кушко, Методы обработки измерений. Квазиправдоподобные оценки. – М.: 1983.