В сложной экономической ситуации, которая сложилась в последнее время в Украине, для предприятий одним из способов удержаться на плаву является удешевление производимой продукции. Для этого необходимо всемерное сокращение потребления электроэнергии и повышение производительности оборудования. Дуговые электросталеплавильные печи (ДСП) - это мощнейшие потребители электроэнергии, в связи с чем нужно стараться уменьшить их энергопотребление. Эффективным направлением решения данной проблемы является автоматизация управления электрическим режимом, что позволяет сократить электрические и тепловые потери.
Целью данной работы является исследование динамических режимов работы приводов подачи электродов дуговой электросталеплавильной печи на примере 100-тонной дуговой печи итальянской фирмы "Danieli" миниметаллургического завода "ИСТИЛ". Вышеупомянутая печь имеет гидравлические привода подачи, и их работу можно рассматривать как близкую к эталону, как в плане быстродействия, так и в плане точности регулирования. Однако, несмотря на всю кажущуюся идеальность, и данная система регулирования имеет резерв по улучшению качества работы, что можно достичь при помощи современных систем автоматического регулирования. Дуговые печи, которые имеют регуляторы, оснащенные электромеханическим приводом пока еще проигрывают гидроприводам по качеству регулирования. Поэтому цель работы - выяснить в какой мере необходимо улучшить показатели работы электромеханических приводов средствами автоматизации, чтобы выйти на новый качественный уровень работы и сравняться в этом плане с гидроприводами.
В работе дается качественное сравнение систем автоматического регулирования электромеханических приводов подачи электродов ДСП и гидравлических приводов. Приводятся осциллограммы рабочих параметров печи фирмы "Danieli". Эти данные снимались при помощи микропроцессорных регистраторов параметров "Рекон" и "Pronto". По результатам работы можно сделать вывод о том, что у печей и с электромеханическими и с гидравлическими приводами подачи электродов есть запас по улучшению регулирования, и это улучшение реально, если применить современные высокопроизводительные системы автоматического регулирования электрическим режимом.
СОДЕРЖАНИЕ РАБОТЫ
1 История развития и эволюция дуговых сталеплавильных печей
Электрические печи применяются в производстве, основанном на нагреве материалов или изделий с помощью электрической энергии. Несмотря на то, что электроэнергия проходит ряд сложных трансформаций (сначала топливо превращается в тепло в тепловых электростанциях, после чего передаётся на большие расстояния, а затем преобразуется снова в тепло, необходимое для нагрева материалов в печи), в результате которых до потребителя доходит не более четвёртой части энергии топлива, сжигаемого на электростанциях, электронагрев имеет ряд явных, неоспоримых преимуществ по сравнению с непосредственным использованием энергии топлива.
Основными преимуществами электротермических процессов являются следующие:
1)возможность концентрации энергии в небольших объёмах и, следовательно, получения таких высоких температур, которые не могут быть достигнуты другим путём;
2)возможность необходимого распределения тепла в небольших объёмах, что позволяет нагревать крупные массы изделий или материалов с большой точностью и равномерностью;
3)лёгкость управления выделением тепловой энергии, что позволяет регулировать ход технологического процесса и автоматизировать его;
4)возможность работы в вакууме или защитной атмосфере;
5)лёгкость конструирования полностью автоматизированных и механизированных агрегатов;
6)возможность улучшения условий работы обслуживающего персонала и увеличения условий труда.[1]
В дуговых электросталеплавильных печах электроэнергия преобразуется в тепловую в электрической дуге. Явление электрической дуги было впервые открыто в 1802 г. известным русским академиком В.В. Петровым. В его работе "Известия о гальвани-вольтовских опытах" (1803 г.) описаны все важные свойства электрической дуги, используемые в технике для освещения, плавки металлов из их окислов.
Электрическая дуга, которая возникает в ДСП между электродами и шихтой обладает следующими свойствами:
1)дуга горит длительное время и должна быть максимально устойчивой;
2)для дуги характерна большая мощность при сравнительно низком напряжении и большой силе тока;
3)дуга горит в закрытом пространстве, поверхностями которого поглощается вся мощность, излучаемая ею.[1]
Дуговые печи появились лишь в последней четверти XIX века, т.к. необходимые предпосылки для их создания были изобретены именно в этот период. Это и создание электромашин и изобретение трансформатора, а также открытие трёхфазного тока. Однако, промышленное использование ДСП оказалось возможным лишь при наличии большого количества дешёвой электроэнергии, при возможности трансформировать электроэнергию, так как процесс плавления стали требует затрат энергии с определёнными параметрами - значительной силой тока и относительно невысоким напряжением, и при возможности экономичной транспортировки энергии от электростанций потребителю.
Первая ДСП в России вместимостью 3,5 т была построена в 1910 г. В начале развития ДСП были однофазными. Дальнейшее их совершенствование показало явное преимущество печей трёхфазных, питаемых переменным током.[3]
Русские учёные и инженеры совершенствовали ДСП иностранного производства и создавали свои оригинальные конкуренции. Инженеры С.С. Штейнберг и А.Ф. Грамолин создали оригинальную печь с угольными нагревателями, которая применялась на уральских заводах для выплавки качественных сталей. Инженеры С.И. Тельный и В.Г. Евреинов предложили в 1916 г. дуговую печь с добавочным магнитным полем - печь с вращающейся электрической дугой. В дальнейшем идея внести в печь добавочное магнитное поле получила воплощение в виде электромагнитного перемешивания металла.
К концу 80-х годов сложилась следующая структура сталеплавильного производства в мире: конвертерное 56 %, электросталеплавильное 28 %, мартеновское 16 %. Отличается устойчивая мировая тенденция снижения (до полного исчезновения в большинстве промышленно развитых стран) доли мартеновской стали и увеличения абсолютного количества и относительной доли электростали. Последнее объясняется явными преимуществами этого процесса: малые капиталовложения, технологическая и организационная гибкость процесса, возможность полного исключения вредных экологических воздействий и др. Сталеплавильное производство нашей страны характеризуется большой долей (52 %) малоэффективного мартеновского производства. Доля электростали, производимой на заводах чёрной металлургии, составляет лишь 13%. В связи с этим основным направлением развития сталеплавильного производства является приоритетное развития электросталеплавильного производства с выводом из эксплуатации мартеновских печей.[4]
Большой вклад в развитие, исследование, совершенствование современных ДСП различной мощности и вместимости внесли Н.В. Окороков, А.И. Строганов, И.Ю. Зинуров, Л.Е. Никольский, Л.К. Кузнецов, В.М. Сойфер - авторы многочисленных книг по теории ДСП.
2 Основное электрооборудование ДСП
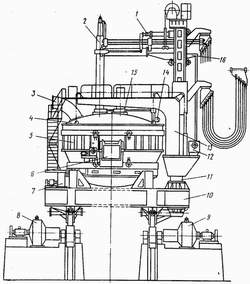
На рисунке 1 представлено схематическое изображение 100-тонной печи.
Рисунок 1 - Схематическое изображение 100-тонной ДСП.
В комплекте ДСП согласно ГОСТ должно поставляться следующее основное оборудование и узлы: электропечной трансформаторный агрегат, регулятор мощности, щиты и пульты управления и контроля, вторичный токопровод с гибкими кабелями (короткая сеть), программирующее устройство для управления электрическим режимом, устройство для электромагнитного перемешивания жидкого металла совместно с источниками питания и станциями управления, комплектное распределительное устройство с печными выключателями, источники питания оперативного постоянного тока.
Электрическую схему печной установки разделяют на две части: трансформаторные цепи и вспомогательные механизмы. В свою очередь схема трансформаторной цепи разделяется на цепь главного и оперативного тока.
Электрическая цепь главного тока ДСП содержит разъединитель, служащий для включения и выключения установки от сети высокого напряжения, выключатель мощности, служащий для оперативного выключения печи, реактор (лишь для печей малой и средней мощности) с шунтирующим (в конце периода расплавления) выключателем, печной трансформатор, короткая сеть, соединяющая вторичные выводы печного трансформатора с электродами, собственно электропечь, установку электромагнитного перемешивания, электродвигатели перемещения электродов, трансформаторы тока, которые включены на высокой и низкой сторонах для подключения защиты, измерительных приборов, приборов учёта, а также автоматических регуляторов мощности и САУ.
К вспомогательным механизмам относят электроприводы подъёма дверцы, поворота свода, вращения ванны и подъёма свода, наклона печи, насоса охлаждения трансформатора.
Основная задача электропечного трансформатора заключается в преобразовании системы трёхфазного тока питающей сети в систему, соответствующую специальным требованиям для ДСП. В качестве электропечных используют специально изготавливаемые для этой цели трансформаторы, характерной особенностью которых является повышенная механическая прочность, определяющаяся ударной силой тока короткого замыкания и рассчитанная на толчковый характер нагрузки и частые эксплуатационные короткие замыкания, большой номинальный ток (десятки килоампер) при сравнительно низком вторичном напряжении (100 - 600 В); широкий диапазон регулирования вторичного напряжения при большом числе ступеней напряжения.
Регулирование мощности на электродах в электропечном трансформаторном агрегате сводится к изменениям схемы включения его первичной обмотки. Во вторичной обмотке, включенной как правило в треугольник, протекают значительные рабочие токи, и поэтому непосредственное переключение вторичной обмотки затруднено. Регулирование проводится тремя способами.
1)Изменением числа витков первичной обмотки трансформатора. Как известно, коэффициент трансформации K = U1/U2 = W1/W2, откуда
U2 = U1(W2/W1), т.е. величина вторичного напряжения при неизменном количестве витков вторичной обмотки W2 обратно пропорциональна числу витков первичной обмотки. Подключение к сети выводов от наименьшего числа витков первичной обмотки соответствует наивысшему вторичному напряжению.
2)Включением первичной обмотки трансформатора звездой или треугольником. При включении первичной обмотки трансформатора треугольником на фазу приходит линейное напряжение питающей сети. При включении первичной обмотки трансформатора звездой на фазу приходится фазное напряжение питающей сети. Поэтому вторичное напряжение, соответствующее треугольнику первичной обмотки, в раз выше вторичного напряжения, соответствующего звезде первичной обмотки.
Комбинируя оба способа регулирования напряжения, получают удвоенное число ступеней вторичного напряжения.
3)Изменением индуктивности реактора, путём отключения части витков его обмотки. Регулирование реактора позволяет вводить в печь различные реактивные мощности. Мощность трёхфазного реактора Q = 3·I2wL. Откуда следует, что при заданном токе регулирование мощности можно выполнить, меняя индуктивность L за счёт изменения числа витков обмотки.[3]
Переключение ступеней у электропечей малой вместимости производится при снятии напряжения питающей сети путём отключения высоковольтного выключателя. При большом числе ступеней вторичного напряжения мощных трансформаторов ДСП применяют так называемое "переключение ступеней напряжения под нагрузкой", т.е. трансформатор переключается в нормальном рабочем режиме - под напряжением и током. При этом исключаются значительные простои, неизбежные при переключении без нагрузки. Кроме того, переключение "под нагрузкой" необходимо для автоматического регулирования мощности печи. Комплексная автоматизация дуговых электропечей потребует возможности регулирования вторичного напряжения под нагрузкой и на небольших печах.
Для подвода электричества в рабочее пространство печи применяют электроды. От физических свойств и качества изготовления электродов в значительной степени зависят процессы теплообмена в печи, производительность электропечной установки, себестоимость и качество металла.
В настоящее время в ДСП преимущественно применяют графитированные электроды, которые обладают более высокой электропроводностью (в 4 - 5 раз) и теплопроводностью, чем угольные. Это улучшает их эксплуатационные характеристики. Хорошая обрабатываемость графитированных электродов позволяет улучшить качество соединительных ниппелей. Расход графитированных электродов примерно в два раза меньше, чем угольных. Поэтому, несмотря на более высокую их стоимость (в 2 - 5 раз), графитированные электроды предпочтительнее угольных.[5]
Механизм передвижения электродов имеет исключительно важное значение для работы печи, так как он в основном определяет качество автоматического регулирования электрического режима плавки, а следовательно, подаваемую в печь мощность РП, cosф и КПДэ. Тем самым качество механизма передвижения влияет на производительность печи, удельный расход электроэнергии, на науглероживание металла.
Роль механизма передвижения электродов исключительно ответственна, так как отклонения электрического режима от заданного необходимо ликвидировать передвижением электродов за доли или единицы секунд. В то же время электрод надо установить при заданной длине дуги с точностью до одного или нескольких миллиметров, причём длина дуги может составлять всего 10 - 20 мм.[1]
Механизмы перемещения электродов снабжены электромеханическим или гидравлическим приводами.
Исполнительный механизм с электромеханическим приводом состоит из электродвигателя, редуктора (червячного или цилиндрического), механической передачи (канатно-барабанной, реечной или винтовой) и конструкций, несущих электрод. В электромеханическом приводе механизмов обычно применяют шунтовые двигатели постоянного тока с линейной зависимостью числа оборотов двигателя от силы тока нагрузки или двигатели переменного тока с использованием магнитных и полупроводниковых усилителей, а также электромагнитных муфт трения.
Для быстрой ликвидации толчков тока в период расплавления шихты необходим подъём электродов с большой скоростью. Скорость подъёма зависит от скорости установившегося движения и от времени разбега механизма. Время разбега зависит от инерции подвижных частей механизма и от времени переходных электромагнитных процессов в электрической схеме регулятора, которое сравнительно мало и составляет сотые доли секунд.
Инерционность и запаздывание системы автоматического регулирования зависят от конструкции исполнительного механизма.
Исполнительный механизм с тросово-барабанной передачей имеет время запаздывания 300 - 400 мс, в процессе эксплуатации вследствие увеличения зазоров время запаздывания возрастает до 800 - 1000 мс. Расчёты показывают, что запаздывание в системе ~100 мс заметно снижает допустимую скорость перемещения электродов. Высокие значения инерционности и запаздывания обусловлены наличием инерции двигателя, зазоров в передачах, сухого трения в механизмах системы. Наряду с этим быстродействие системы регулирования ограничено упругостью звеньев исполнительных механизмов, которая при высоких скоростях перемещения электродов приводит к механическим колебаниям, передающимся регулятору и ухудшающим его работу.[6] Однако при данном механизме обеспечивается наибольшая гарантия против поломок электродов при соприкосновении с твёрдой шихтой.
Также находят применение механизмы с жёсткой связью, в которых тросовую передачу заменяют реечной. Однако и в этом случае запаздывание значительно и составляет 75 - 150 мс. При этом наблюдается большая долговечность и меньший уход в эксплуатации по сравнению с тросом.[1]
Наименьшее запаздывание (не более 60 мс) имеет гидравлический привод. Гидравлические приводы ДСП выполняют с объёмным и дроссельным управлением. Гидравлический привод с объёмным управлением - это по сути электромеханический привод с гидравлической передачей, преимущество которого - большой КПД передачи, недостатки - сложность и громоздкость. Гидравлический привод с дроссельным управлением обладает малыми габаритами и весом, высоким быстродействием, обусловленным главным образом малой инерцией подвижных частей и высокой силовой напряжённостью, однако трудно создать плотное и долговечное уплотнение в цилиндре.[6]
Вопрос о преимущественном применении электро- или гидропривода в настоящее время ещё не решён, имеются сторонники и того и другого, так как оптимальная скорость движения электродов до 6 м/мин достижимы при обоих приводах.
Наряду с усовершенствованием оборудования и технологии выплавки стали в ДСП важным средством повышения производительности печи, снижения расхода электроэнергии и улучшения качества выплавляемой стали, а также улучшения условий труда обслуживающего персонала является система автоматического управления (САУ). Система предназначена для управления электрическим и технологическим режимами печи, представления информации о процессе плавки и состоянии оборудования в удобной форме и документирования необходимой информации. Функции системы состоят из стандартных функций, выполняемых регулятором мощности, и дополнительных функций, выполняемых контроллером.[3]
Все современные дуговые электропечи ёмкостью 1,5 т и выше укомплектовываются автоматическими регуляторами мощности, которые обеспечивают поддержание мощности печи на определённом уровне, заданном программой; быструю ликвидацию всех нарушений режима, в частности технологических коротких замыканий, обрывов дуг и т.п.[2]
В процессе работы регулятор воздействует на привод механизма перемещения электродов, восстанавливая длину дугового промежутка, соответствующую заданной мощности печи. Переключение ступеней напряжения печного трансформатора в целях регулирования мощности печи по периодам плавки осуществляется либо вручную - оператором, либо с помощью автоматических устройств.
Существуют два способа регулирования полезной мощности печи: изменением полезного сопротивления дуги или вторичного напряжения трансформатора. В процессе плавки обычно применяют регулирование путём изменения полезного сопротивления.
На практике широкое распространение получили токовые и дифференциальные регуляторы мощности. Параметром регулирования в первом случае выбрана сила тока печи. Регулятор в процессе работы поддерживает неизменной силу тока печи, её реактивную мощность и мощность электрических потерь. Дифференциальный регулятор поддерживает постоянным отношение напряжения к силе тока печи, т.е. сопротивление фазы. При одновременном изменении напряжения и силы тока печи положение электрода не меняется.
Дифференциальный регулятор, установленный на дуговой сталеплавильной печи, имеет ряд существенных преимуществ по сравнению с токовым.
При исчезновении напряжения на печи (отключение главного выключателя) сигнал разбаланса в плечах тока и напряжения регулятора отсутствует и электроды неподвижны. Токовый регулятор при исчезновении напряжения срабатывает на опускание электродов, что обусловливает необходимость специального устройства, предотвращающего их опускание.
При включении токового регулятора электроды трёх фаз опускаются. Дуги зажигаются только в том случае, когда два электрода (или три) одновременно касаются металла. В других случаях возможна поломка электрода или науглероживание металлической ванны. На печах, где установлен токовый регулятор, пуск печи производят вручную, а регулятор подключают в тот момент, когда горят все дуги. Дифференциальный регулятор позволяет осуществить автоматический пуск печи, поскольку в момент соприкосновения первого электрода с шихтой напряжение становится малым и регулятор останавливает электрод. При подходе второго электрода зажигаются дуги в двух фазах печи. Недостатком токовой системы регулирования является то, что при отсутствии нулевого провода или при включении низкой стороны печного трансформатора в треугольник система работает неустойчиво.
Возможные случайные изменения силы тока одной фазы вызывают изменения силы тока в двух других фазах, вследствие чего происходят ненужные перемещения электродов, неравномерное распределение нагрузки между отдельными фазами и устанавливаются дуги различных длин. Может произойти погружение в ванну того электрода, под которым была самая короткая дуга.
При дифференциальном регулировании с увеличением силы тока в одной из фаз перемещения электродов остальных фаз значительно меньше (или совсем отсутствуют), так как увеличение силы тока двух других фаз сопровождается одновременным повышением напряжений в них (вследствие "перекоса" звезды напряжений).
Чувствительность дифференциального регулятора выше при прочих равных условиях, так как одновременно с увеличением силы тока снижается напряжение соответствующей фазы, и наоборот.
Недостатком дифференциального регулятора является большая зависимость мощности печи от колебаний напряжения сети. При уменьшении напряжения сети регулятор, поддерживая постоянным отношение напряжения к силе тока, снизит соответственно значение последней, поэтому увеличение мощности печи будет значительнее, чем увеличение напряжения. Токовый регулятор снизит мощность печи пропорционально первой степени напряжения.
Наибольшее распространение дифференциальные регуляторы получили в сталеплавильных печах, характеризующихся резкими отклонениями режима (короткие замыкания, обрывы дуги), отключениями и пусками печи.[6]
Необходимо также описать те возмущающие воздействия, влияние которых и должен устранять регулятор мощности:
1)медленное изменение режима, обусловленное изменениями как длины дугового промежутка (постепенное уменьшение длины электродов вследствие их обгорания, опускание электродов в шихту в период образования колодцев, подъём уровня жидкого металла в ванне по мере расплавления), так и его характеристики (изменения сопротивления дуги, вызываемые нестабильностью температуры в зоне разряда);
2)резкое отклонение режима в основном в период плавления, вызываемые обвалами шихты, часто переходящее в короткие замыкания и обрывы дуги;
3)кратковременные и преходящие нарушения режима могут быть вызваны кипением ванны жидкого металла и флуктуациями дуг под воздействием электромагнитных сил. В первом случае длительность нарушений режима составляет десятые доли секунды, поэтому регулятор вследствие инерционности привода не в состоянии успеть за этими колебаниями. Однако регулятор должен поддерживать на заданном значении среднюю силу тока в течение периода. Во втором случае изменения режима составляют сотые доли секунды и систематически повторяются каждый период. Эти колебания из-за кратковременности автоматический регулятор не отрабатывает;
4)изменения мощности, подводимой к печи, вызванные колебаниями напряжения питающей сети. В условиях работы большинства заводов напряжение сети в течение суток отклоняется от номинального на 5 -10 %. При этом в зависимости от выбранного параметра регулирования мощность изменяется по-разному;
5)в промышленных печах дуги образуют звезду без нулевого провода, поэтому ток любой дуги может возвращаться к трансформатору через две другие фазы. Изменение силы тока в одной из фаз вызывает однозначное изменение силы тока в двух других фазах. При коротком замыкании электрода данной фазы последовательно с короткозамкнутой фазой оказываются включёнными две (или одна) другие фазы, поэтому бросок тока уменьшается, но одновременно вызывает заметное увеличение тока в двух других фазах;[6]
6)на условия горения дуг влияет неравномерное распределение мощностей по фазам. Основной причиной переноса мощности является асимметричность значительной части короткой сети печи - обычно на участках токопровода от выводов низкого напряжения печного трансформатора до контактных поверхностей между щекой и электродом. В этом случае у одного из крайних электродов выделяемая мощность оказывается наибольшей ("дикая" фаза), у другого крайнего - наименьшей ("мёртвая" фаза) и у среднего - промежуточной, часто близкой к наибольшей. Для выравнивая "дикой" и "мёртвой" фаз рекомендуется:
a)раздельное регулирование вторичных напряжений отдельных фаз трансформатора;
b)установку вокруг ошиновки крайних фаз железных замкнутых магнитопроводов со вторичными обмотками, соединёнными между собой таким образом, чтобы взаимоиндуктивность между крайними фазами усиливалась;
c)расположение токопроводов по вершинам равностороннего треугольника или шихтовку разных фаз;
d)увеличение силы тока у "мёртвой" фазы и одновременно уменьшение силы тока у "дикой" фазы.
7)скоростное изменение мощности по сравнению с заданным из-за ошибки "слежения", наблюдаемое в период проплавления дугами колодцев в шихте. Эта ошибка будет тем выше, чем больше зона нечувствительности регулятора (при опускании электрода регулятор поддерживает мощность на уровне нижней границы зоны нечувствительности, при подъёме - на уровне верхней границы зоны нечувствительности);
8)неодинаковая скорость проплавления колодцев под отдельными электродами, обусловленная разной плотностью шихты под дугами. Она усиливает асимметрию индуктивных сопротивлений отдельных фаз и снижает общую мощность, подаваемую в печь.
Перечисленные возмущающие воздействия свидетельствуют о том, что печи работают в асимметричных режимах, т.е. выделение мощности в отдельных дугах в процессе плавки неравномерно. Для получения высоких технико-экономических показателей необходимо создать условия для стабильного и равномерного выделения полезной мощности в дугах, что в определённой мере выполняет регулятор электрического режима.[6]
К регуляторам предъявляются следующие основные требования:
1)достаточная чувствительность по регулируемому параметрами, необходимая для обеспечения заданного режима работы печи с допустимыми пределами отклонений (зона нечувствительности ±3 - 6 % в период плавления и ±2 - 4 % в другие периоды плавки);
2)быстродействие системы, обеспечивающее устранение максимальных возмущений (короткое замыкание и обрыв дуги) в течение 1,5 - 3,0 сек, желательно при апериодическом характере регулирования;
3)уменьшение ненужных перемещений электродов при асимметричных изменениях режима при кратковременных (доли секунд) преходящих возмущениях;
4)возможность достаточно плавного изменения задаваемой мощности печи в пределах 20 - 125 % от номинальной с точностью 5 %;
5)возможность быстрого лёгкого перехода с автоматического управления на ручное и наоборот;
6)автоматическое зажигания дуг печи;
7)остановка всех электродов печи при исчезновении напряжения питания;
8)надёжность и простота обслуживания.[6]
Элементное исполнение регуляторов может быть различным. В измерительном звене для установки задания применяют автотрансформаторы, трансформаторы с переменным коэффициентом трансформации, потенциометры, а для формирования регулируемого параметра - специальные реле, резисторы, электронные и магнитные усилители и т.д. В качестве силовых усилителей могут быть использованы контактные реле и контакторы, электромашинные, электронные, полупроводниковые, магнитные усилители, гидроусилители и золотники.
Различные комбинации перечисленных элементов позволяют получать большое число принципиальных схем регуляторов, реализующих заданный закон регулирования. Выбор соответствующей комбинации основных средств автоматизации определяется в первую очередь качеством регулирования и надёжностью системы. Эти показатели в значительной мере зависят от особенностей силового усилителя и привода механизма перемещения электрода.
По типу усилителя системы автоматического регулирования электрического режима дуговой сталеплавильной печи можно классифицировать на следующие группы:
3)статический усилитель (магнитный, ионный, полупроводниковый и т.д.) - двигатель;
4)статический усилитель - муфта трения или скольжения;
5)электрогидравлика.
Наилучшие показатели имеет гидравлический дроссельный регулятор. Неплохими свойствами обладают регуляторы с электромагнитными муфтами и транзисторным усилителем, с усилителем на управляемых вентилях и электромашинный. Регуляторы с магнитными усилителями и с гидравлическим объёмным приводом существенно им уступают. Однако наиболее надёжными в работе являются схемы с магнитными усилителями.[6] Также нужно заметить, что в настоящее время в основном применяются регуляторы на управляемых вентилях и гидравлические регуляторы.
Широкое распространение получила система автоматического управления на базе программируемых логических контроллеров и промышленных компьютеров, которые осуществляют следующие режимы ведения плавки:
1)информационно-советующий;
2)полуавтоматический с реализацией управления уставками токов дуг в автоматическом режиме, переключения ступеней напряжения - в ручном;
3)автоматический - с реализацией управления уставками токов дуг и ступеней напряжения в автоматическом режиме.
Для решения перечисленных функций использованы следующие средства вычислительной техники:
1)устройство сопряжения, предназначенное для программируемого ввода-вывода цифровых двухпозиционных сигналов;
3)микро-ЭВМ, содержащая микропроцессор, параллельный и последовательный интерфейсы, контроллер прерываний, управление межмашинной магистралью и интервальный таймер;
4)пульт оператора с клавиатурой и дисплеем.
Для построения высококачественной системы автоматического регулирования электрического режима ДСП можно применить многоуровневую адаптивную систему управления, которая включает четыре основные уровни. Первый уровень обеспечивает требуемые характеристики перемещения электродов печи. Второй - необходимое качество работы регулятора первого уровня путём формирования соответствующего закона управления. Третий - определяет параметры требуемого электрического режима печи путём формирования управляющих воздействий на первые два. Чётвертый - содержащий управляющую микро-ЭВМ - повышает качество работы регулятора третьего уровня, обеспечивает автоматизацию статического управления и оптимизацию процесса управления плавкой в целом.
Алгоритм адаптивного управления электрическим режимом ДСП способен удовлетворить следующие требования и условия: автоматическое зажигание дуг; автоматическое адаптивное задание требуемого электрического режима в статике и динамике; использование в качестве параметра динамического управления адаптивно вычисляемого падения напряжения на дуге; адаптация задания к колебаниям напряжения в системе электроснабжения печи и устройства управления к изменению коэффициента передачи объекта управления, задания и коэффициента передачи устройства к изменению уровня вторичного напряжения печного трансформатора; инвариантность относительно возмущений режима в соседних фазах; защита от ввода системы в автоколебательный режим, от опасных коротких замыканий, от упора электрода в непроводящие участки шихты; наличие статической и динамической характеристик регулятора, обеспечивающих необходимые чувствительность, точность и быстродействие системы с использованием гидравлического исполнительного механизма перемещения электродов; возможность автоматического задания электрического режима в автономном варианте (без микро-ЭВМ) с коррекцией по уровню постоянной составляющей напряжения дуги, применения генератора инфранизких частот, быстрого перехода с автоматического управления на ручное и наоборот.
Разработанное автоматическое устройство адаптивного управления электрическим режимом испытывалось на печи ДСП-100 Н3А Донецкого металлургического завода.[7]
Использование автоматизированной системы управления в сталелитейном производстве является прогрессивным направлением, позволяющим не только повысить производительность, но и освободить обслуживающий персонал от тяжёлых, опасных и утомительных работ, а также обеспечить экономию материалов и топливно-энергетических ресурсов. Срок окупаемости незначителен. Этому в значительной мере способствует освоение серийного производства микро-ЭВМ, которые по своим техническим характеристикам находятся на уровне управляющих ЭВМ, но имеют большие преимущества по стоимости, габаритам и надёжности. В результате применения САУ улучшены следующие показатели работы ДСП: расход электроэнергии сократился на 5 %, производительность возросла на 5 %, расход электродов снизился на 4 %, огнеупорных материалов - на 10 %. Несмотря на то, что САУ одной печи обеспечивает высокие технико-экономические показатели, целесообразно использование САУ в цехе с несколькими печами и общей автоматизированной системой. В этом случае будет обеспечиваться оптимальное распределение электроэнергии между печами, будут исключаться пиковые нагрузки на сеть и достигаться другие преимущества. Постоянное совершенствование средств вычислительной техники создаёт предпосылки для более широкого использования САУ в литейных цехах.[3]
3 Тенденции развития дуговых печей
Современные сверхмощные дуговые печи переменного и постоянного тока характеризуются высокими коэффициентами использования установленной энергетической мощности (не ниже 0,9), долей токового времени плавки (не ниже 0,75) и производительностью (не ниже 100 т/ч). Они используются в основном как высокопроизводительные агрегаты для выплавки полупродукта. Обеспечение заданного состава и температуры стали выделяется в самостоятельное звено и реализуется средствами внепечной обработки. Подобное разделение оправдано с энергетической точки зрения, поскольку обеспеченная высшим энергетическим потенциалом дуговая печь не имеет права использовать этот потенциал только в течение примерно половины цикла плавки, как это происходит на печах, работающих по устаревшим технологиям. Более того, современный набор технологий внепечной обработки позволяет выполнить эти операции в ковше более эффективно, чем в дуговой печи. Поэтому разработки конструкции современных дуговых печей и технологий плавки стали в них нацелены на повышение производительности агрегатов и оптимизацию энергопотребления при выполнении неизменно ужесточающихся требований по охране окружающей среды.
В настоящее время наиболее распространены дуговые печи переменного тока. За последние десятилетия резко возросли технико-экономические показатели их работы, тенденция чего прослеживается по приведенным в таблице 1.1 данным:
Таблица 1.1 - Данные изменения технико-экономических показателей работы дуговых печей
1965 г.
1995 г.
Цикл плавки, мин
180
60
Расход электроэнергии, кВт·ч/т
630
330
Расход электродов, кг/т
6,5
2,3
Мировой опыт показывает, что рациональной ёмкостью печи является от 100 до 150 т.
В настоящее время в мире выделилось несколько фирм-лидеров в конструировании и изготовлении современных электропечей: "Danieli" (Италия), "Clesim" до 1996 г., "Kvaerner Metals" (Франция), "Mannesman Demag Huttertechnik MDI" до 1997 г., сейчас "Mannesman Metallurgic" (Германия), "Nippon Steel" (NSC) (Япония), "Fucks" (Германия) и др.
Дуговые печи переменного тока последнего поколения характеризуются огромной производительностью (более 1 млн. т в год), инженерными решениями многих элементов конструкции и электрооборудования. Тем не менее следует отметить, что по сравнению с печами постоянного тока они работают с несколько более низким коэффициентом мощности, являются источником мощных помех в питающих энергосистемах, вызывают сильную загазованность окружающей среды, имеют высокий уровень шума.
С целью устранения указанных недостатков с начала 80-х годов всё большее распространение получают дуговые печи постоянного тока. Их промышленное использование позволило уменьшить расход электродов, энергии, огнеупоров, снизить шумовыделение и воздействие на питающую сеть (фликер). До 1990 г. их число измерялось единицами, к началу 1993 г. в мире в эксплуатации находилось 46 дуговых печей постоянного тока, а к концу 1998 г. более 130.
В технологии этих печей заложено множество новых электротехнических, конструкторских и технологических разработок: новые конструкции трансформаторов, выпрямителей, фурм, горелок, систем автоматизации и управления, новые технологии вдувания кислорода, углерода, шлакообразующих, подогрева и загрузки шихты, дожигания технологических газов, донного внецентренного выпуска плавок, вспенивания шлаков, донной продувки ванны газами и т.д. Продолжительность плавки в новых крупных печах существенно сократилась (менее 60 мин). Ожидается доведение её в ближайшее время до 30…40 мин.
Фирмы, выпускающие печи постоянного тока, указывают следующие преимущества по сравнению с печами переменного тока: меньший удельный расход электродов на 50…60 %; снижение уровня фликера на 50 %; возможность подводить большую мощность; надёжность электрооборудования; работа с длинными дугами; перемешивание ванны за счёт электродинамических сил; упрощение технического обслуживания и сокращение трудозатрат; равномерная тепловая нагрузка на футеровку печи; снижение уровня шума на 15 дБ; стабилизация технологии; лучшее формирование колодцев при их проплавлении; снижение угара легирующих элементов; снижение содержания азота в стали; уменьшение газовыделения и пылеобразования; снижение расхода огнеупоров; повышение производительности.
Несмотря на рекламируемые преимущества ДППТ, некоторые фирмы предпочитают устанавливать новые высокоимпедансные трёхфазные печи. Это обусловлено тем, что капитальные затраты на печь переменного тока ниже, суммарный расход электроэнергии практически одинаков, торцовой расход электродов и воздействие на питающую сеть высокоимпедансных трёхфазных печей и печей постоянного тока сближаются, печи переменного тока обладают большей гибкостью в регулировании температуры ванны.
Исследование постоянного и переменного тока показало, что дуга постоянного тока характеризуется пониженным значением градиента потенциала в столбе дуги, что для обеспечения выделения в дуге требуемой мощности вызывает необходимость увеличения её длины (до 0,8…1,0 м). В периоды жидкого металла это приводит к росту излучения на стены и свод печи и увеличению тепловых потерь. Поэтому, несмотря на большую, чем в трёхфазных печах скорость нагрева и расплавления металла, печь постоянного тока не даёт особых преимуществ по производительности. Кроме того, в ДППТ требуются специальные меры по предотвращению отклонения дуги из-за явления магнитного дутья. Введение в электрическую цепь полупроводникового источника снижает надёжность установок и повышает её стоимость. Не полностью отвечает электротехническим требованиям и дуга переменного тока. В начальный период плавки дуга имеет небольшую длину, что повышает вероятность эксплуатационных коротких замыканий и расход энергии, усиливает влияние на питающую сеть. В то же время дуга непрерывно перемещается, что расширяет колодцы и снижает проблему перегрева подины. В периоды жидкого металла дуга переменного тока более эффективна (не считая расхода электродов).
Исследования КПД дуг постоянного и переменного тока показали, что КПД дуг переменного тока в зависимости от электрического и шлакового режима изменяется в пределах 0,55…0,85, в то время как КПД дуг постоянного тока - в пределах 0,40…0,75, чем и объясняется больший, в некоторых случаях, удельный расход электроэнергии в дуговых печах постоянного тока.
В ближайшем будущем продолжается соревнование дуговых печей постоянного и переменного тока. В настоящее время ввод в эксплуатацию дуговых печей постоянного тока вдвое больше, чем переменного.
С усложнением технологии и сокращением длительности плавки обслуживающему персоналу труднее своевременно и адекватно реагировать на текущую информацию о ходе процесса и состоянии оборудования. Комплексная автоматизация и оптимизированное управление, включающие регулирование электрических параметров дуги и перемещение электродов (пофазно), расчёт оптимальных расходов кислорода, топлива, шлако- и пенообразующих присадок, режим использования горелок, вдувание кислорода, водяного охлаждения, давления под сводом, ввода материалов в печь и др., должна быть направлена на сокращение потерь времени для принятия оперативных решений, как неотъемлемое условие максимальной производительности и минимальных энергозатрат.
Мгновенные расчёты энергетического и материального балансов возможны лишь на базе современной вычислительной техники. Поэтому дуговые печи оснащают способным к самообучению компьютерным регулятором, программа работы которого основана на принципах нейронной сети. Главная особенность новых систем автоматизации состоит в том, что она не стремится приводить электрический и технологический режимы печи к каким-либо стандартным параметрам, заранее заложенным в систему, а учитывая особенности выплавляемой стали, шихты и хода плавки, выдвигают по ходу плавки новые оптимумы, к которым, используя все технологические системы, приводятся электрический и технологический режимы дуговой печи. Использование таких систем позволяет сократить длительность плавки на 2…5 мин, повысить производительность печи на 2…5 %.
За последние годы существенно изменились методы и технические средства при управлении работой ДСП. Это в первую очередь, связано с широким использованием средств вычислительной техники. В обычной практике в принятой иерархической структуре управления нижний уровень занимают микроконтроллерные системы. Эти системы управляют электрическим режимом печи, механизмами подачи добавок, подачей кислорода и газа в печь и выполняют некоторые другие функции.
Регуляторы электрического режима, созданные на основе использования микроконтроллеров (SIMELT AC фирмы "Сименс", РММ 9522 АО "Черметавтоматика"), имеют возможность гибкого изменения коэффициентов усиления, форсированной отработки коротких замыканий и разрывов дуг, уменьшения взаимовлияния фаз, управления процессом при нестандартных ситуациях. Некоторые фирмы для управления электрическим режимом используют стандартные персональные компьютеры ("ABB Industrial Systems", "Фукс Системтехник"). В этих системах предусмотрено пофазное изменение заданий (уставок) регуляторам, ступеней напряжения, что приводит к равномерному расплавлению шихты. При управлении ДСП может быть использовано двух- или трёхуровневое управление. На втором уровне решаются, как правило, задачи управления тепловым, технологическим и электрическим режимами - формирование заданий нижнему уровню. На третьем иерархическом уровне решают задачи оптимизации ввода электроэнергии в печь. Общая цепь оптимизации состоит в поддержании максимального уровня активной мощности в любой момент плавки. В основу концентрации оптимального управления электрическим режимом ДСП положена динамическая модель электропечного контура, непрерывно адаптирующаяся к меняющимся условиям в процессе плавки.
С использованием методов искусственного интеллекта (теории нейронных сетей) находят такие значения заданий (уставок) регулятору электрического режима, которые в каждый момент оптимизируют вводимую мощность, в отличие от традиционного управления, когда используются, в основном, три значения уставок, обеспечивающих длинную, среднюю и короткую дуги. В подобных системах уставки меняются очень часто, в общем случае в каждый такт управления и в широких пределах.
Реализуются подобные системы искусственного интеллекта (SIMELT NEC фирмы "Сименс", IAF фирмы "Neural Application Corporation") на базе мощных ЭВМ и по сообщениям в печати приносят ощутимый экономический эффект. Фирма "Neural Application Corporation" разработала регулятор "думающая дуговая печь", построенный на использовании компьютерных программ, имитирующих работу мозга человека, включающий три нейронно-сетевые системы: первая вычисляет возможную ошибку регулирования за 100…300 нс до её совершения, вторая действует как традиционный регулятор - меняет положение электродов с учётом сигнала, формируемого первой системой, третья анализирует накапливающуюся информацию и оптимизирует управление печью. В регуляторе использованы две ЭВМ с процессорами 8046: "Пентиум" и аналоговая система сбора данных производительностью 400 тыс. проб в секунду. Для первичного обучения регулятора после его подключения к печи требуется около 10 мин, для полного - около недели.
Дальнейшим развитием системы оптимизации плавки являются интегрированные компьютерные системы управления всеми объектами электросталеплавильного цеха, обеспечивающие ход всего технологического процесса и его контроль из различных точек цеха. Ставится задача перевести работу дуговых печей в полностью автоматизированный режим без участия оператора. На первый план выходит разработка "думающих печей".
С усложнением технологии и сокращением длительности плавки обслуживающему персоналу труднее своевременно и адекватно реагировать на текущую информацию о ходе процесса и состоянии оборудования. Комплексная автоматизация и оптимизированное управление, включающие регулирование электрических параметров дуги и перемещение электродов (пофазно), расчёт оптимальных расходов кислорода, топлива, шлако- и пенообразующих присадок, режим использования горелок, вдувание кислорода, водяного охлаждения, давления под сводом, ввода материалов в печь и др., должна быть направлена на сокращение потерь времени для принятия оперативных решений, как неотъемлемое условие максимальной производительности и минимальных энергозатрат.
Мгновенные расчёты энергетического и материального балансов возможны лишь на базе современной вычислительной техники. Поэтому дуговые печи оснащают способным к самообучению компьютерным регулятором, программа работы которого основана на принципах нейронной сети. Главная особенность новых систем автоматизации состоит в том, что она не стремится приводить электрический и технологический режимы печи к каким-либо стандартным параметрам, заранее заложенным в систему, а учитывая особенности выплавляемой стали, шихты и хода плавки, выдвигают по ходу плавки новые оптимумы, к которым, используя все технологические системы, приводятся электрический и технологический режимы дуговой печи. Использование таких систем позволяет сократить длительность плавки на 2…5 мин, повысить производительность печи на 2…5 %.
За последние годы существенно изменились методы и технические средства при управлении работой ДСП. Это в первую очередь, связано с широким использованием средств вычислительной техники. В обычной практике в принятой иерархической структуре управления нижний уровень занимают микроконтроллерные системы. Эти системы управляют электрическим режимом печи, механизмами подачи добавок, подачей кислорода и газа в печь и выполняют некоторые другие функции.
Регуляторы электрического режима, созданные на основе использования микроконтроллеров (SIMELT AC фирмы "Сименс", РММ 9522 АО "Черметавтоматика"), имеют возможность гибкого изменения коэффициентов усиления, форсированной отработки коротких замыканий и разрывов дуг, уменьшения взаимовлияния фаз, управления процессом при нестандартных ситуациях. Некоторые фирмы для управления электрическим режимом используют стандартные персональные компьютеры ("ABB Industrial Systems", "Фукс Системтехник"). В этих системах предусмотрено пофазное изменение заданий (уставок) регуляторам, ступеней напряжения, что приводит к равномерному расплавлению шихты. При управлении ДСП может быть использовано двух- или трёхуровневое управление. На втором уровне решаются, как правило, задачи управления тепловым, технологическим и электрическим режимами - формирование заданий нижнему уровню. На третьем иерархическом уровне решают задачи оптимизации ввода электроэнергии в печь. Общая цепь оптимизации состоит в поддержании максимального уровня активной мощности в любой момент плавки. В основу концентрации оптимального управления электрическим режимом ДСП положена динамическая модель электропечного контура, непрерывно адаптирующаяся к меняющимся условиям в процессе плавки.
С использованием методов искусственного интеллекта (теории нейронных сетей) находят такие значения заданий (уставок) регулятору электрического режима, которые в каждый момент оптимизируют вводимую мощность, в отличие от традиционного управления, когда используются, в основном, три значения уставок, обеспечивающих длинную, среднюю и короткую дуги. В подобных системах уставки меняются очень часто, в общем случае в каждый такт управления и в широких пределах.
Реализуются подобные системы искусственного интеллекта (SIMELT NEC фирмы "Сименс", IAF фирмы "Neural Application Corporation") на базе мощных ЭВМ и по сообщениям в печати приносят ощутимый экономический эффект. Фирма "Neural Application Corporation" разработала регулятор "думающая дуговая печь", построенный на использовании компьютерных программ, имитирующих работу мозга человека, включающий три нейронно-сетевые системы: первая вычисляет возможную ошибку регулирования за 100…300 нс до её совершения, вторая действует как традиционный регулятор - меняет положение электродов с учётом сигнала, формируемого первой системой, третья анализирует накапливающуюся информацию и оптимизирует управление печью. В регуляторе использованы две ЭВМ с процессорами 8046: "Пентиум" и аналоговая система сбора данных производительностью 400 тыс. проб в секунду. Для первичного обучения регулятора после его подключения к печи требуется около 10 мин, для полного - около недели.
Дальнейшим развитием системы оптимизации плавки являются интегрированные компьютерные системы управления всеми объектами электросталеплавильного цеха, обеспечивающие ход всего технологического процесса и его контроль из различных точек цеха. Ставится задача перевести работу дуговых печей в полностью автоматизированный режим без участия оператора. На первый план выходит разработка "думающих печей".
ОСНОВНЫЕ РЕЗУЛЬТАТЫ РАБОТЫ
Целью данной работы является следующее: необходимо выяснить, насколько возможно сократить время регулирования (отработки перемещения) регулятором мощности печи и, следовательно, уменьшить электрические и тепловые потери. Время регулирования и точность отработки заданного перемещения зависит не только от регулятора мощности, но и от механизма перемещения. На приведенном ниже рисунке 2 приведена диаграмма энергетических показателей периода расплавления печи ёмкостью 10 т с электромеханическим приводом регулятора мощности и канатно-барабанной механической передачей. Данная печь находится на Краматорском металлургическом заводе.
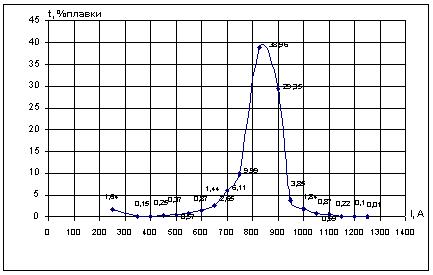
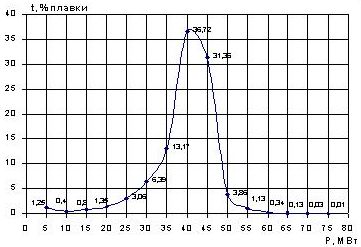
Из рисунка видно, что 12 % времени плавления шихты печь работает на токах короткого замыкания. В этом режиме вся мощность уходит на потери, полезная мощность равна нулю. Это самый неблагоприятный режим работы печи. Необходимо, чтобы время работы на токах КЗ стремилось к нулю. С этой задачей и должен справляться регулятор мощности. По сравнению с электромеханическим приводом подачи электродов, гидравлический более точно отрабатывает задание и с лучшим быстродействием (такая система управления электроприводами подачи установлена на 100-тонной печи). На рисунках 3 и 4 приведены зависимости тока и мощности в процентах от времени плавки почти идеального случая плавления, когда шихта однородна и все элементы управления хорошо налажены.
Рисунок 3 - График распределения тока фазы в процентах от времени плавления 100-тонной печи с гидравлическим приводом подачи электродов и реечным исполнительным механизмом.
Рисунок 4 - График распределения активной мощности фазы в процентах от времени плавления 100-тонной печи с гидравлическим приводом подачи электродов и реечным исполнительным механизмом.
Из графиков видно, что на токах КЗ печь работает всего около 0,1 %, около 70 % - при номинальных или близких к ним токах. Это то, к чему следует стремиться при построении системы регулирования электрическим режимом печи. И это показывает неоспоримые преимущества гидравлических приводов над электромеханическими. Однако в реальности даже гидравлические привода имеют резерв по улучшению.
8)Международная научно-практическая конференция "Автоматизированный печной агрегат - основа энергосберегающих технологий XXI века. Москва 2000. Микропроцессорный регулятор для дуговых сталеплавильных печей. Лапшин И.В., Чехович К.А. АО "Черметавтоматика", г. Москва
9)Дуговые сталеплавильные печи. Сборник научных трудов. под редакцией Пирогова Н.А. М.:Энергоатомиздат, 1991, 136с.
 1 - пружинно-пневматический зажим;
1 - пружинно-пневматический зажим;