Глава первая
МАТЕМАТИЧЕСКИЕ МОДЕЛИ ЭЛЕМЕНТОВ СИСТЕМ ЭЛЕКТРОСНАБЖЕНИЯ СОБСТВЕННЫХ НУЖД ТЭС И АЭС
1.1.
Особенности построения схемы питания с.н., электрических станций.
Современные электростанции проектируются мощностью 3 - 6 ГВт и их выполняют по блочному принципу. При этом на ТЭС устанавливают блоки единичной мощностью 300, 500, 800, 1200 МВт, а на АЭС - 500, 1000, 1600 МВт. Основным (рабочим) источником питания собственных нужд является трансформатор, присоединяемый к выводам генератора. Вторым, резервным, источником питания является трансформатор, связанный непосредственно с энергосистемой. Этот трансформатор во многих случаях используется также для пуска блоков, в связи с чем его называют пускорезервным. Кроме указанных выше, на электростанциях предусматривают также аварийные источники питания, используемые при выходе из строя рабочего и резервного трансформаторов или при авариях в энергосистеме. В качестве аварийных источников питания с.н. используют аккумуляторные батареи, дизель генераторы, газотурбинные установки или другие автономные источники питания.
Для привода механизмов с.н. используются в основном асинхронные
короткозамкнутые электродвигатели мощностью от 200 до 8000 кВт на напряжение 6 кВ. Для питании электродвигателей
меньшей мощности применяется напряжение 0,4 кВ, для получения которого предусматриваются
специальные трансформаторы. В будущем ставится задача перехода в системе с.н,
на напряжения 10 и 0,66 кВ, что позволит понизить уровни токов к.з., уменьшить
сечения кабелей или же повысить мощность двигателей, подключаемых к одной
секции. Синхронные двигатели мощностью до 3000 кВт применяют сейчас в основном
на ТЭС для привода шаровых углеразмольных мельниц, в будущем ставится задача
возможности применения СД единичной мощностью до 20 МВт на АЭС для привода
главных циркуляционных насосов (ГЦН).
По требованиям, предъявляемым к надежности электроснабжения,
потребители с.н. АЭС разделяются на три следующие группы:
Первая группа - потребители, по условиям безопасности
требующие повышенной надежности электроснабжения и не допускающие перерыва
питания более чем на доли секунды даже при полном исчезновении напряжения от
рабочих и резервных трансформаторов с.н.
и требующие обязательного наличия аварийного питания после срабатывания
аварийной защиты (АЗ) реактора.
Вторая группа - потребители, предъявляющие повышенные требования к надежности электроснабжения, но допускающие
перерывы питания по условиям безопасности от десятков секунд до десятков
минут и требующие обязательного наличия питания после срабатывания АЗ реактора.
Третья
группа – потребители, допускающие перерывы питания на время действия АВР и не
требующие наличия питания после срабатывания АЗ реактора.
Питание
потребителей первой и второй групп в аварийных режимах производится от аварийных
источников системы надежного питания (аккумуляторной батареи с обратным
двигателем – генератором или статическим преобразователем и дизель генераторной
станции и др.).
Число секций с.н.
6 кВ для каждого блока зависит от количества ГЦН первого контура
энергетического реактора. При шести ГЦН на блок к одной секции подключается не
более двух ГЦН, при четырех и менее ГЦН на блок подключается не более одного ГЦН на секцию. Число секций
принимается не менее двух, каждая из которых подсоединяется к рабочему
трансформатору через свой выключатель. К этим секциям кроме ГЦН, имеющих
дополнительные маховые массы на валу, подключаются также потребители 6 кВ
третьей группы. На каждую из этих секций предусматривается автоматический ввод
резервного (АВР) питания. Количество секций с.н. 6 кВ для потребителей второй
группы должно соответствовать числу систем безопасности АЭС, принятых в
технологической части. Эти секции подключаются к источнику рабочего питания
через два последовательно включенных выключателя. АВР на секции надежного
питания не предусматривается. В аварийных режимах (при работе АЗ реактора или
при обесточивании секции 6 кВ рабочего питания от которой нормально питается
секция надежного питания) к секции надежного питания автоматически подключается
дизель-генератор, обеспечивающий аварийное расхолаживание реактора. Набор
нагрузки дизель генератором осуществляется ступенями или методами частотного
пуска. При числе блоков на АЭС от трех до шести предусматривается не менее двух резервных трансформаторов. При наличии
генераторных выключателей в цепи каждого блока число резервных
трансформаторов может быть на один уменьшено. Магистрали шин резервного питания
6 кВ секционируются выключателями через 2-3 блока.
Секции 0,4 кВ первой группы надежности получают аварийное питание
от щитов постоянного тока 220 В через статические преобразователи постоянного
тока в переменный или через обратимые двигатель-генераторы. Для потребителей
0,4 кВ системы управления и защиты (СУ) предусматривается питание от двух
отдельных трансформаторов 6/0,4 кВ с взаиморезервированием. Кроме того, питание
приводов СУЗ резервируется от специальной аккумуляторной батареи.
Выбор количества и мощности трансформаторов рабочего и
резервного питания с.н. должен производиться также с учетом результатов
проверки обеспеченности самозапуска электродвигателей при кратковременных перерывах питания в схеме с.н.,
длительность которых определяется
на основе анализа действия устройств РЗА.
Принципиальная схема питания с.н. АЭС, выполненная на основе
изложенных выше принципов, приведена на
рис.1.1. Таким образом, для разработки математической модели
многомашинной системы электроснабжения с.н. ТЭС и АЭС нам необходимо
рассмотреть прежде всего математические модели основных ее элементов:
трансформаторов и шин рабочего и резервного питания, асинхронных и синхронных
двигателей, синхронных дизель-генераторов, активно-индуктивной (статической)
нагрузки недвигательного характераа.

1.2. Математическая модель трансформатора, линий межузловых связей и статической нагрузки.
В общем случае силовые трансформаторы
представляют Т-образной схемой замещения, подобной схеме замещения
заторможенного асинхронного двигателя. Однако в связи с тем, что ток холостого хода
трансформатора составляет обычно менее одного процента от номинального тока
соответствующей обмотки, сопротивление ветви намагничивания можно принимать
равным бесконечности ( Zm=¥ ). Тогда трансформатор
может быть представлен R-L -цепью, т.е.
аналогично активно-индуктивной нагрузке.
С учетом изложенного математическая модель
трансформатора, включённого между узлами 1 и 2 (рис
1.2), может быть представлена в переходных
режимах дифференциальными уравнениями, записанными во вращающихся с
частотой wк осях X, У, как:
![]() (1.1)
(1.1)
Дифференциальные
уравнения активно-индуктивной нагрузки в узле 2:
![]() (1.2)
(1.2)

Рис.1.2. Радиальная схема питания
двигательной нагрузки.
Дифференциальные уравнения для линий
межузловых связей (например, реакторная связь между узлами 2,3 на рис.1.2)
записывают аналогично (1.1):
![]() (1.3)
(1.3)
1.3. Математическая модель асинхронного двигателя системы
с.н.
В
системах с.н. ТЭС и АЭС применяют асинхронные с короткозамкнутым ротором
двигатели большой единичной мощности. С целью улучшения пусковых характеристик
таких двигателей их ротор выполняют глубокопазным
со стержнями трапецеидальной или колбообразной формы. При разработке
математических моделей такого типа двигателей требуется учет эффекта
вытеснения тока в роторе. Из-за указанного эффекта активное и индуктивное
сопротивления зависят от частоты тока в роторе, в связи с чем их часто
представляют в виде функциональных зависимостей от скольжения. В таком виде
схемы замещения АД могут быть использованы только для расчета стационарных и
квазистационарных режимов. Поведение двигателей в переходных режимах более
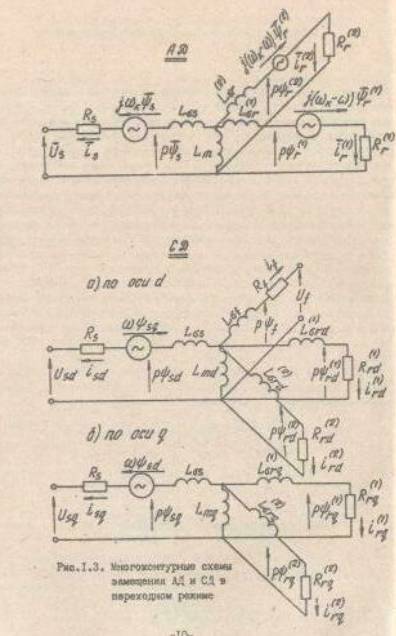
точно отражают многоконтурные схемы замещения,
в которых ротор представлен в виде нескольких параллельно
включенных R-L - цепочек (контуров),
параметры которых остаются постоянными независимо от частоты тока в роторе. В
дальнейшем мы за основу будем принимать именно такую многоконтурную схему
замещения асинхронного двигателя (рис.1.3).
Для АД с многоконтурным (i=1,2,…,k) ротором дифференциальные уравнения, описывающие
поведение машины в переходном режиме, можно представить как:

Представим
уравнения (1.4), (1.5), (1.8) в форме Коши, приняв за неизвестные потокосцепления статора н контуров ротора. Для
этого из (1.6) найдем сначала токи, а затем из (1.7) рабочее
потокосцепление (потокосцепление воздушного зазора):

где:

Из (1.9) с учетом (1.10) можно получить матрицу связи С для
определения токов статора и ротора через потокосцепления, выраженные в системе
координат X, У, вращающейся с угловой скоростью wк :


Для численного
решения на ЭВМ уравнений (1.4) - (1.8) их удобно представить в виде
уравнений состояния (интегрируемых относительно переменных состояния, в
качестве которых мы приняли потокосцепления статора и ротора и частоту вращения
ротора) и уравнений связи (1.13). С учетом (1.13)-(1.16) уравнения
состояния и связи примут вид:

В развернутом виде уравнения состояния
(1.17) и связи (1.18) записаны в табл.1.1 и 1.2, в которых элементы
матрицы Якоби А даны с учетом приведенных ниже обозначений
для коэффициентов затухания соответствующих контуров:

В режимах затяжного пуска и
самозапуска АД необходимо знать превышение температуры обмоток статора и ротора
над температурой охлаждающей среды. Указанные величины можно найти из решения
уравнений:



![]() (1.22)
(1.22)
Известно, что при пуске двигателя на холостом ходу перегрев ротора не зависит от приложенного напряжения и длительности пуска, и может быть найден как:
![]() (1.23)
(1.23)
Относительный
перегрев обмотки ротора:
 (1.24)
(1.24)
Уравнения
(1.17) - (1.19), (1.24) представляют
собой наиболее общую математическую модель глубокопазной асинхронной машины и
позволяет рассчитать любые ее электромеханические переходные процессы с учетом
вытеснения токов в роторе и зависимостей активных сопротивлений статора и
ротора от температуры.