Лизогуб М.В., студентка; Гавриленко Б.В., доцент, к.т.н.
(Донецкий национальный технический университет, г.Донецк, Украина )
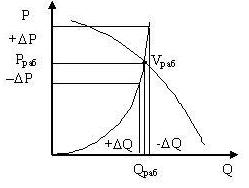
Совершенствование средств автоматизации проветривания тупиковых выработок происходило, в основном, по пути обновления элементной базы и в меньшей мере – расширения функциональных возможностей. Опыт эксплуатации существующей аппаратуры (АПТВ) выявил ряд существенных недостатков, связанных с недостаточной чувствительностью применяемых датчиков контроля воздуха (дискретного и генераторного типа). Требуемая чувствительность датчика обусловлена спецификой положения рабочей точки на напорной характеристике вентилятора и эпюрой скоростей в воздухопроводе (рис.1). Анализ характеристик показывает, что незначительное изменение подачи вентилятора ±ΔQ, например, при возникающей утечке в подающем воздухопроводе приводит к значительному изменению напора вентилятора ±ΔP. Современные средства контроля (базовая аппаратура) не позволяют определять, а тем более, прогнозировать дальнейшее развитие аварийной ситуации. Для реализации этих функций необходимо использовать модернизированные источники информации о количестве воздуха, подаваемого в забой, а также совершенствовать аппаратную часть системы управления ВМП.
Рисунок 1 – Характеристики ВМП и сети.
Реализация алгоритмов контроля и управления на базе аппаратуры АПТВ имеет ряд недостатков. Основной недостаток – это реализация вдержки времени 0,5-20мин. На пассивных RС-цепях, что обеспечивает применение электрических конденсаторов большой емкости (до 1000 мкФ), которые обладают невысокой надежностью и высокой стоимостью. Кроме того, реализация АПТВ на основе транзисторных элементов привело к ее громоздкости (3 электронных блока на 16 выполняемых функций. Реализация функций этой аппаратуры на базе микроконтроллера КР1816ВЕ51 позволило избавить аппаратуру автоматизации от указанных выше недостатков.
Для получения высокой чувствительности измерения расхода воздуха принят ДТП с распределенной по всей длине катушки обмоткой возбуждения и с удлиненной формой магнитопровода [1]. На изоляционном каркасе наматывается: катушка возбуждения с двумя полуоботками W1/2 и две вторичных W2. Разность ЭДС встречно включенных обмоток определяется из выражения (1):
ΔE=ωIW1W2 gb03/l12X (1)
где: ω – частота напряжения питающей сети; X– ход сердечника; W1 = W2 – число витков катушек возбуждения; I – ток нагрузки; b0 – значение части якоря, через которую проходит поток, сцепляющийся со вторичными обмотками, при симметричном положении якоря; g - значение удельной проводимости, приходящейся на 1см длины якоря; l1 – значение части магнитопровода, соответствующее первичной катушке возбуждения.
Подробное описание конструкции разработанного датчика приведено в [5].
При работающем ВМП давление в месте отбора на калиброванной вставке пропорционально расходу воздуха, подаваемого в забой. Это давление воздействует на мембрану, которая изгибается и перемещает ферритовый сердечник дифференциального трансформатора вверх, нарушая тем самым первоначальный баланс ЭДС во вторичных его обмотках. В результате, возникает разностное напряжение на выходных клеммах датчика. Величина этого напряжения, пропорциональная перемещению сердечника, а, следовательно, и расходу воздуха, поступает на вход устройства контроля и сигнализации.
Вследствие этих преобразований набор выполняемых функций дополнен новой функцией контроля утечек воздуха по расходу и выдачи сигнализации в случае достижения величины утечки выше допустимого по правилам безопасности значения. Для реализации функции контроля утечки необходимо использовать два диффтрансформаторных датчика, один из которых следует установить в начале трубопровода у выхода ВМП, а другой – в устье тупиковой выработки на расстоянии не более 10-15м от груди забоя.
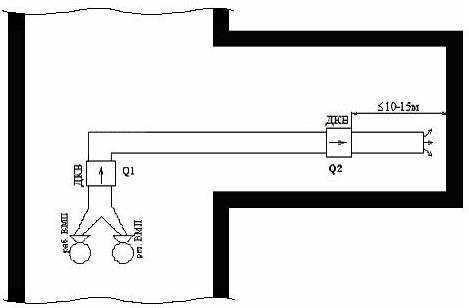
Рисунок 2 – Схема размещения датчиков в призабойном пространстве.
Таким образом, имея значения Q1 и Q2 расхода воздуха соответственно вначале и в конце трубопровода, мы можем найти утечку и сравнив значение утечки с допустимым значением сделать соответствующие выводы.
Применение разработанного устройства в комплексе с микроконтроллером КР1816ВЕ51 позволило расширить функциональные возможности аппаратуры автоматического управления проветриванием тупиковых выработок.
Перечень ссылок
Лизогуб М.В., студентка; Гавриленко Б.В., доцент, к.т.н. II Международная научно-техническая студенческая конференция "Механика жидкости и газа". ДонНТУ-2003.