|
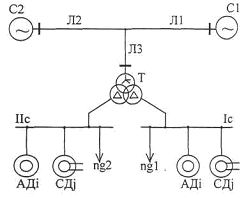
Рисунок 1 - Типовая схема узла нагрузки энергосистемы |
"Сборник научных статей по электротехнике Донецкого Национального Технического Университета", 2003 г.
УДК 621.713.13:621.313
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ РЕЖИМОВ ГРУППОВОГО ВЫБЕГА
И САМОЗАПУСКА В СИСТЕМАХ ЭЛЕКТРОСНАБЖЕНИЯ С
АСИНХРОННЫМИ И СИНХРОННЫМИ ДВИГАТЕЛЯМИ
Сивокобыленко В.Ф., Лебедев В.К., Кукуй К.А. Донецкий национальный технический университет SvJ@elf. dgtu. donetsk. ua
The mathematical model of unit of an impellent load in a system based on full differential equations of its elements is considered. Expressions for definition of voltage in units of the rated circuit are received. The model allows to expect modes of a group running-down, a self-starting at the breaks of a feed caused by symmetric and asymmetrical short circuits in the circuit of electrosupply with asynchronous and synchronous motors.
Системы электроснабжения с асинхронными и синхронными двигателями получили широкое распространение в различных отраслях промышленности: металлургических и химических предприятиях, магистральных газо- и нефтепроводах, в системах собственных нужд электростанции и др. Типовая схема таких систем электроснабжения приведена на рис. 1. Для анализа их работы при кратковременных нарушениях электроснабжения требуется учет токов подпитки места короткого замыкания от двигательной нагрузки, определение частоты, фазы и уровня напряжения на шинах питания двигателей, учет перетоков мощностей между отдельными двигателями и узлами нагрузки при их групповом выбеге, выбор уставок устройств релейной защиты и автоматики. При этом требуется определение мгновенных значений параметров режимов (токов, напряжений, мощностей, моментов и др.).
|
Рисунок 1 - Типовая схема узла нагрузки энергосистемы |
В работах, посвященных данной теме, в основном рассматриваются узлы нагрузки, содержащие только асинхронные двигатели [1-4], или только синхронные [5-8], и недостаточно освещен вопрос анализа поведения комплексного узла нагрузки, состоящего из произвольного числа асинхронных и синхронных двигателей, статической нагрузки. Кроме того, в указанных работах и других [9-13] рассматриваются и анализируются в основном перерывы питания, вызваны симметричными короткими замыканиями, тогда как известно, что в питающих сетях ПО - 330 кВ с глухим заземлением нейтрали преобладающими являются однофазные" короткие замыкания. Решение указанных вопросов и явилось целью настоящей работы, в которой представлено математическое описание коротких замыканий и режимов группового выбега и самозапуска асинхронных и синхронных двигателей, реализованное в цифровой модели на ПЭВМ. При разработке модели принимались общепринятые допущения для электрических машин и трансформаторов (синусоидальность магнитного потока в зазоре, неучёт насыщения магнитных потоков, симметрия фазных обмоток). Типовая схема системы электроснабжения с асинхронными и синхронными двигателями, аналогичная приведенной в [8], может быть представлена из питающих энергосистем С1 и С2 с соответствующими ЭДС Е ь Е 2 , линий межсистемных связей Л1, Л2 и линии ЛЗ, подключенной глухой отпайкой к линиям Л1, Л2 для питания через понижающий трансформатор Т двигательной и статической нагрузки на напряжении 6 - 10 кВ. Трансформатор Т содержит две расщепленные обмотки низшего напряжения и имеет схему соединений Y /Д/Д. В такой схеме будем рассматривать симметричные и несимметричные короткие замыкания и кратковременные перерывы питания на стороне высшего (110-330кВ) и низшего (6-10кВ) напряжений.
Трёхфазная схема замещения рассмотренной типовой схемы электроснабжения предоставлена на рис.2. В этой схеме к каждой из секций 6 - 10 кВ подключены асинхронные (i=l,2...n) и синхронные двигатели (j = l,2...m), статическая нагрузка ngl, ng2, шунты shl, sh2 для моделирования коротких замыканий, а также обмотки низшего напряжения трансформатора НН1 и НН2. Сеть высшего напряжения представлена обмотками трансформатора, соединенными в звезду, ЭДС систем Е Л 1 и Е Л 2> линиями Л1, Л2, шунтом sh3 для моделирования любых видов коротких замыканий, а также заземлениями нейтралей питающих систем, трансформатора Т и шунта sh3.
Способы определения активных сопротивлений и индуктивностей указанных элементов схемы рассмотрены в работах [2,8,11,12]. Асинхронные и синхронные двигатели представлены схемами замещений с двухконтурным эквивалентным ротором по каждой из осей d, q и, кроме того, в синхронных двигателях учтена
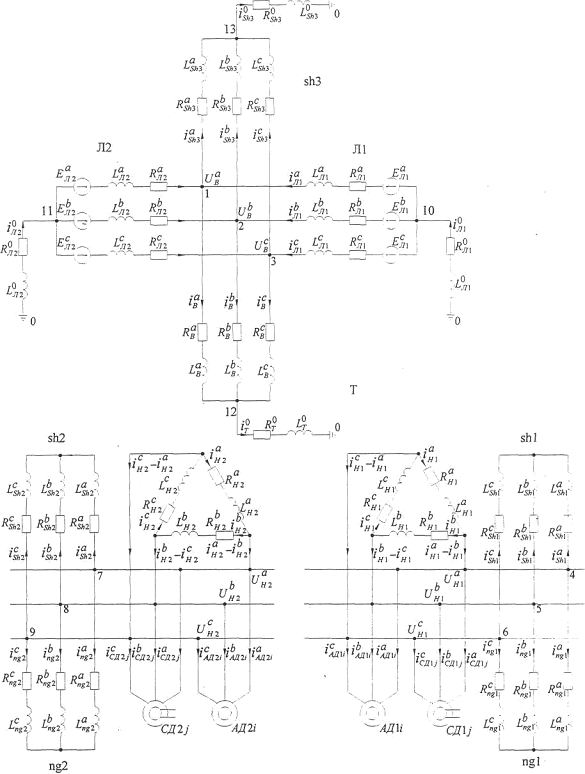
Рисунок 2 — Трехфазная схема замещения узла энергосистемы с двигательной нагрузкой
обмотка возбуждения по оси d . Дифференциальные уравнения статических элементов (трансформатора, питающих линий, шунтов, нагрузки) записываются в фазных координатах а, Ь, с, о, уравнения асинхронных двигателей - в неподвижных относительно статора координатах а, р\ уравнения синхронных двигателей - во вращающихся вместе с ротором каждой машины индивидуальных осях d , q . При этом на каждом шаге расчета, используя соотношения, приведенные в [12], производится преобразование переменных асинхронных и синхронных двигателей к фазным координатам а, Ь, с. С целью уменьшения количества вычислительных операций в данной модели за основу приняты для асинхронных и синхронных двигателей дифференциальные уравнения, записанные относительно токов статора и ротора [2,8].
Как видно из схемы замещения системы (рис.2) она содержит кроме базисного нулевого 13 узлов, 34 ветви для статических элементов, а также на каждой секции по п присоединений для асинхронных двигателей и т присоединений для синхронных двигателей. Положительные направления токов и напряжений ветвей указаны на схеме стрелками. Для определения токов и напряжений ветвей за основу принят метод узловых напряжений. Последние находятся из решения системы алгебраических линейных уравнений, которая получена из выражений первого закона Кирхгофа для производных от узловых токов. Для понижения порядка указанной системы уравнений с 13 до 9 выразим токи в ветвях заземлений нейтралей через сумму соответствующих фазных токов и определив через них напряжения узлов 10 - 13, учтём их затем в уравнениях обмотки высшего напряжения трансформатора, линий Л1, Л2, шунта sh 3 . После определения узловых напряжений переменные состояния находятся из численного решения методом Рунге-Кутта дифференциальных уравнений отдельных элементов схемы.
Запишем дифференциальные уравнения отдельных элементов. Для трёхобмоточного трансформатора имеющего расщеплённые обмотки низшего напряжения с учетом рабочего магнитного потока и потоков рассеяния эти уравнения в матричной форме записи в фазных координатах а, b, с, о могут быть представлены как:
В (1) используются параметры схемы замещения трансформатора: L m - индуктивность ветви
намагничивания; активные сопротивления обмоток
соответствующих фаз; L B , L B , L B , L m , L H ] , L m , L H 2 , L H 2 , L H 2 - полные индуктивности обмоток,
О О состоящие из суммы индуктивностей рассеяния и индуктивности ветви намагничивания; Яр, Lj - - активное
сопротивление и индуктивность для токов нулевой последовательности в цепи заземления нейтрали обмоток высшего напряжения; р = -=- — оператор дифференцирования.
Дифференциальные уравнения элементов сети высшего напряжения, шунта sh 3 линий межузловых связей с их питающими системами, имеющими заземлённые нейтрали, в фазной системе координат а, b, с, о.
Для решения систем уравнений (1) - (3) относительно производных токов необходимо найти обратные матрицы индуктивностей трансформатора L ' T l , имеющую элементы Ь ( ¦ ( m = l ,...,9, j = l ,...,9), шунта L ~ j , 3 с элементами ?* (/=1,...,3, j = l ,...,3), линий Ь л с элементами Ъ'\ (/=1,...,3, j = l ,...,3, л=л\, л2 ), и умножить их на соответствующие правые части уравнений (1) - (3) В (4) - (6) значение первого индекса в обозначении элементов обратных матриц L T , 1 Л /л, L : l определяются из приведённой ниже таблицы, в которой индекс п соответствует обмоткам В, HI , H 2, к - фазам а, Ь, с, а индекс т определяется суммированием значений / и /.
Таблица
Значения первого индекса в элементах Ь т : обратных матриц индуктивностей
п |
В |
HI |
Н2 |
||||||
к |
а |
b |
с |
а |
b |
с |
а |
Ь |
с |
i |
1 |
2 |
5 |
1 |
2 |
3 |
1 |
2 |
j |
1 |
0 |
0 |
0 |
3 |
|
3 |
6 |
6 |
6 |
m=i+l |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
Дифференциальные уравнения нагрузки ngl и ng 2, шунтов shl и sh 2 на стороне низшего напряжения трансформатора запишем в координатах а, Ь, с, в форме Коши аналогично [2]. Для синхронных двигателей из-за магнитной и электрической несимметрии их роторов по осям наиболее целесообразно дифференциальные уравнения решать в осях d , q ротора и осуществлять переход к фазным координатам на каждом шаге расчёта. В [8] были получены полные дифференциальные уравнения СД, имеющего кроме обмотки возбуждения по два эквивалентных демпферных контура в осях d и q . Ниже приведём уравнения только для производных токов статора pi sc i pi sq которые записаны в форме Коши во вращающейся системе координат d и q . В уравнениях (8) и (9) используются параметры схем замещения СД по осям d и q . R s , Rf , R r ( i , R rc j , R r q , R r g - соответственно активные сопротивления обмоток статора, возбуждения и демпферных контуров ротора;
L md , L mq , L sd , L sg - индуктивности ветвей намагничивания и полные индуктивности контуров статора;
dy , qy - коэффициенты обратных матриц индуктивностей СД по осям d и q [ 8 ].
Для определения выражений производных токов статора СД в осях а, Ь, с, аналогично уравнениям
статических элементов сети (4) - (7) воспользуемся матрицами прямого П^д и обратного Лсд
преобразования переменных и получим формулы для производных токов статора СД в осях а, Ь, с и напряжений статора в осях d , q , которые потребуются нам в дальнейшем.Заменив в (12) производные для токов СД их значениями из (8) и (9) с учётом (11), получим выражения для производных токов статора СД в осях а, Ь, с:
В [ 2 ] были получены дифференциальные уравнения АД для двухконтурной схемы замещения, записанные в форме Коши в неподвижной системе координат х, у. Выражения для производных токов статора при этом имеют следующий вид:
где: R s , R r , R r - активные сопротивления обмоток статора и демпферных контуров;
L r , L r , L m - полные индуктивности контуров ротора и ветви намагничивания;
к у - коэффициенты обратной матрицы индуктивностей АД [ 2 ].
Для определения выражений производных токов статора АД в осях а, Ь, с воспользуемся матрицами прямого Пад и обратного П^д преобразования переменных и получим формулы для производных токов статора АД в осях а, Ь, с и напряжений статора в осях х, у, которые потребуются нам в дальнейшем.
Заменив в (18) производные для токов статора АД их значениями из (14) и (15) с учётом (17) получим выражения для производных токов статора АД в осях а, Ь, с.
Найдём выражения для расчёта узловых напряжений в схеме. Для узлов расчётной схемы 1-9 согласно первому закону Кирхгофа для производных токов.Подставив в (20) полученные ранее выражения для производных токов из (4) - (7), (13) и (19) получим систему (21) из девяти алгебраических уравнений, записанную относительно неизвестных напряжений в узлах расчётной схемы в системе неподвижных координат а, Ь, с.
Таким образом получена математическая модель типовой схемы электроснабжения (рис. 1), которая состоит из дифференциальных уравнений её основных элементов и системы алгебраических уравнений (21) для определения узловых напряжений. На каждом шаге расчёта по предшествующим значениям интегрируемых переменных определяются узловые напряжения, а затем, одним из численных методов, выполняется шаг расчёта дифференциальных уравнений всех элементов.
Расчёт режима заданного вида короткого замыкания производится соответствующим изменением сопротивлений шунта на время длительности короткого замыкания. После расчёта режима группового выбега двигателей на короткое замыкание и восстановления до аварийных значений шунта, производится расчёт режима самозапуска двигателей. Моделирование режимов группового выбега двигателей после отключения источника питания по причине, не связанной с возникновением к. з., производится увеличением сопротивлений обмоток высшего напряжения питающего трансформатора Т. При этом фиксируется величина, частота и фаза напряжений на секциях, токи и мощности отдельных двигателей, что позволяет оценить взаимообмен энергией и общий характер поведения узла двигательной нагрузки. Моделирование режимов повторной подачи напряжения на выбегающие двигатели позволяет определить возникающие значения токов и моментов и дать оценку допустимости этих режимов в зависимости от фазы подаваемого напряжения и успешности самозапуска.
В настоящее время.в ряде работ [2,7,8,13,14,15] предлагается для продления срока службы двигателей уменьшать воздействия ударных токов и моментов при возникновении кратковременных перерывов питания. Для этой цели имеются разработки устройств быстродействующего синхронного АПВ и АВР. Разработанная программа позволяет моделировать указанные режимы при различных углах сдвига фазы и уровня остаточного
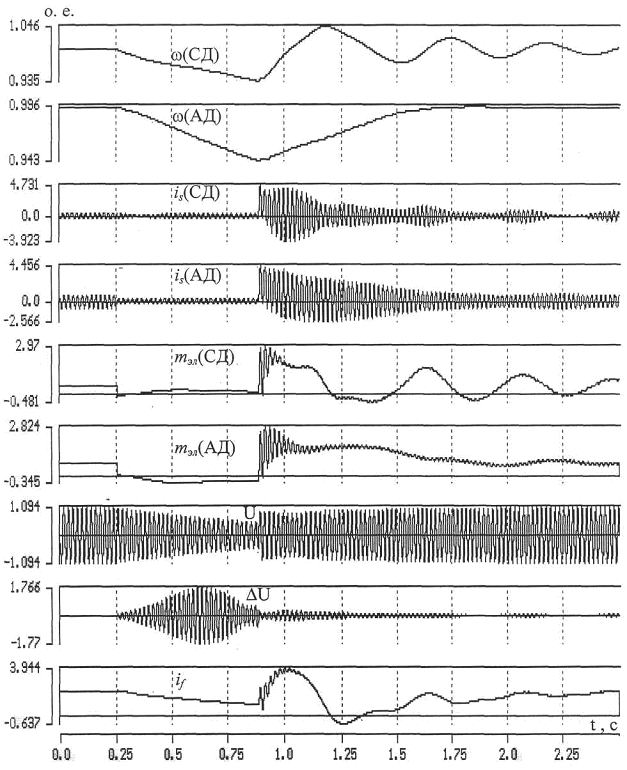
Рисунок 3 - Поведение СД и АД при отключении питания секции на 0.64 с
напряжения на двигателях по отношению к напряжению источника питания. В качестве примера на рис. 3 приведены результаты моделирования кратковременного перерыва питания и последующего режима самозапуска двигателей секции блока 300 МВт, к которой был подключён асинхронный двигатель (АД) привода дымососа (Р н =1700 кВт) и синхронный двигатель (СД) шаробарабанной мельницы (Р н =2000 кВт).
Механизмы работали в установившемся режиме с коэффициентом загрузки 0,5. Как видно из осциллограммы, после отключения питания возник режим группового выбега, в котором синхронный двигатель продолжал потреблять активную мощность, а асинхронный двигатель перешел в генераторный режим. Повторная подача напряжения питания произошла, когда сдвиг по фазе между напряжениями сети и секции составил порядка 365°. Последующий установившийся режим работы комплексной двигательной нагрузки был достигнут примерно за 2,5 с. При моделировании этого же режима с углом расхождения фаз 180° значения ударных токов и моментов существенно превосходят указанные на рис. 3, что подтверждает необходимость использования в системах электроснабжения с двигательной нагрузкой устройств синхронной повторной подачи напряжения питания.
Преимущество разработанной модели по сравнению с известными заключается также в том, что она позволяет исследовать поведение двигательной нагрузки при наиболее распространённых однофазных к. з. в сети 110-330 кВ, а так же при обрывах проводов одной из фаз.
ВЫВОДЫ
• Разработана математическая модель узла двигательной нагрузки энергосистем, содержащая асинхронные и
синхронные двигатели, статическую нагрузку и шунты для моделирования симметричных и несимметричных
коротких замыканий. Все элементы узла описаны полными дифференциальными уравнениями и выражены
относительно производных токов.
• Получены аналитические выражения для определения на каждом шаге расчета мгновенных значений
напряжения в узлах расчета схемы.
3. Разработанная модель позволяет анализировать режимы группового выбега и самозапуска, коротких
замыканий и другие переходные режимы узла комплексной нагрузки, содержащего асинхронные и синхронные
двигатели и может быть использована как на стадии проектирования, так и эксплуатации узлов энергосистем.
ЛИТЕРАТУРА
1. Ойрех Я.А., Сивокобыленко В.Ф. Режимы самозапуска асинхронных двигателей. - М.: Энергия, 1974.
-96 с.
2. Сивокобыленко В.Ф., Лебедев В.К., Кукуй К.А. Математическое моделирование асинхронной
нагрузки в режимах группового выбега и самозапуска. - Сб. научн. трудов ДонНТУ. Серия: электротехника и
энергетика, вып. 41:- Донецк: ДонНТУ, 2002. - с. 28-34.
3. Баков Ю.В. Проектирование электрической части электростанций с применением ЭВМ: Учеб. пособие
для вузов. - М.: Энергоатомиздат, 1991. - 272 с.
4. Кетнер К.К., Козлова И.А., Сендюрев В.М. Алгоритмизация расчетов переходных процессов
автономных электроэнергетических систем. — Рига: Зинатне, 1981. - 166 с.
• Падлюк К., Беднарек С. Пуск и асинхронные режимы синхронных двигателей. Пер. с польск. М., -
Энергия, 1971.-272 с.
• Слодарж М.И. Режимы работы, релейная защита и автоматика синхронных двигателей. - М.: Энергия,
1977.-216 с.
• Овчаренко А.С., Розинский Д.И. Повышение эффективности электроснабжения промышленных
предприятий. - К.: Техника, 1989. - 287 с.
• Сивокобыленко В.Ф., Лебедев В.К., Кукуй К.А. Метод расчета группового выбега синхронной
нагрузки электрических систем. - Сб. научн. трудов ДонНТУ. Серия: электротехника и энергетика, вып. 50: -
Донецк: ДонНТУ, 2002. - с. 79-87.
9. Сыромятников И.А. Режимы работы асинхронных и синхронных двигателей. - М.: Энергоатомиздат,
1984.-240 с.
• Ковач К.П., Рац И. Переходные процессы в машинах переменного тока. - М.Л., Госэнергоиздат, 1963.
-744с.
• Сивокобыленко В.Ф., Костенко В.И. Математическое моделирование электродвигателей собственных
нужд электрических станций. Донецк, ДЛИ, 1979. - 110 с.
12. Сивокобыленко В.Ф. Переходные процессы в многомашинных системах электроснабжения
электрических станций: Уч. пособие. -Донецк, ДЛИ, 1984. - 116 с.
• Голодное Ю.М. Самозапуск электродвигателей. - М.: Энергоатомиздат, 1985. - 136 с.
• Segeda M. Analysis of power system steady states in phase coordinates on PC. HI Sympozjum Metody
matematyczne w elektroenergetyce, Zakopane, 1993. - P. 97-99.
• Wamkeue R., Kamwa I. , Dai-Do X. Numerical modelling and simulation of unsymmerrical transients on
synchronous machines with newtral included // Electric Machines and Power System Journal. - January, 1998.