

Автореферат
Тема магистерской работы:
Висока ефективність вуглевидобутку в значній мірі залежить від чіткості і надійності роботи шахтного транспорту, зокрема , конвеєрного, значення якого стає усе більш суттєвим у зв'язку з віддаленістю лав від вантажних стовбурів шахт.
Оскільки конвеєри призначені не тільки для транспортування корисних вантажів, але і для перевезення людей, особливого значення набувають питання надійної і безпечної експлуатації конвеєрних ліній. Ці питання, а також питання техніко-економічної ефективності конвеєрного транспорту можуть успішно зважуватися тільки в результаті комплексної механізації й автоматизації керування і контролю роботи конвеєрних ліній. [3].
Продуктивність конвеєрного транспорту обумовлюється в першу чергу вантажопотоком, що надходить з лави. Показники роботи очисних вибоїв на шахтах країни поки залишаються нижче закордонних. Для ведучих вуглевидобувних країн характерне підвищення ступеня концентрації очисних робіт, ріст навантаження на лаву при подальшому скороченні числа лав і одночасному збільшенні довжини і швидкості їх подвигания.
Роль автоматизації шахтного конвеєрного транспорту полягає в зниженні трудомісткості обслуговування, вивільненні зайнятих на підземному транспорті працівників, а також у підвищенні безпеки і зниженні травматизму. Останнє досягається введенням необхідних захистів і блокувань, розширенням інформаційних можливостей апаратури автоматизації. Крім того, сучасні засоби автоматизації повинні сприяти оптимізації процесів пуску й останова конвеєрів, зниженню энерго- і матеріалоємності, скороченню простоїв через вихід з ладу електроустаткування.
Усі ці проблеми можуть бути вирішені тільки у випадку використання принципово нових технічних засобів і рішень у схемах апаратури автоматизації - мікропроцесорів і микро-ЕОМ, математичного програмного забезпечення. За рубежем, де практично всі засоби і системи автоматизації для шахт створюються на базі мікропроцесорів і микро-ЕОМ, продуктивність праці підземних робітників зросла на 20 %, а навантаження на лаву - на 40. Пояснюється це тим, що гнучкість мікропроцесорних систем забезпечує кардинальне розширення функціональних можливостей апарата, особливо в частині інформації, що служить підвищенню рівня організації виробництва, безперебійності роботи машин в оптимальних режимах, підвищенню безпеки і т.п.[3].
Вугільна промисловість нашої країни не одержує мікропроцесорну техніку у виконанні, при якому вона може бути використана в шахтах, небезпечних по газі і пилу. Апарати, що випускаються, для автоматизації шахтного транспорту виконані на дискретних елементах, і ця застаріла елементна база встановлює межу росту функціональних можливостей, зокрема за інформацією, засобів автоматизації. Відповідність виробів шахтної автоматики світовому рівню може бути досягнуто тільки при використанні апаратів з убудованими мікропроцесорами і микро-ЕОМ. Побудова пристроїв і систем автоматики на основі програмно керованих компонентів визначає принципово нову організацію робіт, починаючи з виготовлення апаратури, експлуатації її і подальшого ремонтного і профілактичного обслуговування. Таким чином, використання мікропроцесорної техніки приведе до підвищення культури виробництва, як на заводах-виготовлювачах, так і безпосередньо на шахтах. Комплекси, системи і технічні засоби керування шахтним конвеєрним транспортом повинні відповідати вимогам до автоматизації шахтних конвеєрів і конвеєрних ліній, розробленим ведучими конструкторськими і технологічними організаціями галузі, МАКНИИ і ВОСТНИИ, а також Правилам безпеки і правилам експлуатації підземних конвеєрів.
У вугільних шахтах і рудниках для доставки корисних копалин з вибою, а також для транспортування його по збірних штреках, квершлагах, дільничним і капітальним ухилам і бремсбергам, похилим стовбурам і штольням у даний час широко застосовуються скребкові і стрічкові конвеєри.
Ріст продуктивності очисних і прохідницьких комбайнів спричиняє ріст продуктивності і потужності приводних електродвигунів. Зростає продуктивність магістральних стрічкових конвеєрів, установлена потужність електропривода яких досягає 2000 кВт і більш.
Зростаючий обсяг видобутку корисних копалин, збільшення довжини гірських вироблень впливають на умови експлуатації вуглевидобувного устаткування і засобів транспортування і вимагають їхнього безупинного удосконалювання.[2].
Режим роботи конвеєра характеризується:
тривалою роботою протягом значного проміжку часу, тому що завантаження, транспортування і розвантаження здійснюються безупинно, без зупинок. Ця обставина має істотне значення при виборі електродвигуна й інших елементів електропривода;
рідкими пусками й остановами, що порозумівається тривалим режимом роботи конвеєра. Тому тривалість пуску і гальмування не впливають на продуктивність конвеєра. Отже, період пуску можна збільшувати за часом, щоб знизити динамічні навантаження чи в стрічці чи в ланцюзі конвеєра і тим самим збільшити термін служби; сталістю напрямку руху тягового органа конвеєра, що обумовлює застосування нереверсивної схеми керування електродвигуном;
порівняно тяжкими умовами пуску. Важкий пуск - це пуск конвеєра під навантаженням, що пояснюється наявністю вантажу на стрічці після аварійної його зупинки.
Застосування як привід конвеєра асинхронного двигуна з короткозамкнутим ротором з підвищеним пусковим моментом може привести до створення підвищених динамічних зусиль у тяговому органі в період пуску незавантаженого конвеєра. Тому в приводах з асинхронними короткозамкнутими двигунами для забезпечення плавності пуску стрічкового конвеєра і захисту ланцюга скребкового конвеєра при різкому стопорении між електродвигуном і барабаном чи зірочкою встановлюється гідравлічна чи електромагнітна муфта. У випадку ж застосування регульованого електропривода гидро- чи електромагнітна муфта може бути відсутьня.[2].
Умови експлуатації, режими роботи і конструктивні виконання приводних станцій стрічкових конвеєрів формують наступні вимоги, пропоновані до їхніх електроприводів:
використання як електропривод руднічних і взривозахищенних електродвигунів підвищеної надійності під землею і захищені чи нормальні виконання електродвигунів на поверхні. Ті ж вимоги пред'являються і до апаратури керування електродвигунами;
забезпечення високої перевантажувальної здатності при можливо менших пускових струмах;
рівномірний розподіл навантаження між електродвигунами при многодвигательном електроприводі.
Мета автоматизації конвеєрного транспорту –підвищення ефективності і безпеки роботи конвеєрного транспорту.
Задачі автоматизації:
При рішенні поставлених задач за допомогою створення системи автоматизації джерелами технико - економічного обґрунтування є:
Як показав аналіз технічних засобів автоматизації, головним функціональним напрямком автоматизації конвеєрного транспорту є підвищення якості керування, а апаратним напрямком – використання мікроконтролерів.
Підвищення якості керування параметрів роботи конвеєрного транспорту дозволить вирішити наступні питання:
Як апаратуру автоматизації застосовуємо комплекс АУК.1М, що забезпечує виконання контролю, блокування, захистів і сигналізації основних технологічних параметрів стрічкового конвеєра. Комплекс АУК.1М одержав найбільше широке поширення серед подібної собі апаратури.
Однак метою дисертації є модернізація блоку імпульсно-фазового керування для апарата плавного запуску приводу гірської машини АПМ. Таким чином, за апаратуру автоматизації стрічкового конвеєра приймаємо АУК.1М, а за апарат плавного запуску приводу приймаємо АПМ. Апарат АПМ виступає базовою апаратурою для дисертації, тому що виконувані їм функції залишаються тими ж, а змінюється елементна база блоку імпульсно-фазового керування і здійснений перехід з вертикального принципу управління СІФУ на цифровий. Цифрове управління підвищує якість управління в цілому, тому що при цифровому принципі управління зміна параметрів елементів впливає менше, чим при вертикальному принципі управління.
Застосування даного апарата викликане тим, що при прямому пуску завантаженого стрічкового конвеєра часто спрацьовує захист від пробуксовки комплексу АУК.1М; часто відбуваються пориви стрічки, що приводить до значних простоїв добичної ділянки і великих матеріальних утрат унаслідок припинення видобутку вугілля; перегрів і вихід з ладу турбомуфт; вихід з ладу конічних пар редукторів КЦН - 100. Усе це обумовлює необхідність застосування плавного пуску приводу стрічкового конвеєра.[3].
Для наглядної переваги приведемо деякі графіки, які показують різницю між прямим та плавним пуском приводу стрічкового конвеєра.
При розробці нового блоку ІФУ було зроблено математичне моделювання пуску АД при прямій подачі напруги мережі, а також при плавному збільшенні живильного напруги. Графіки струму, моменту, частоти обертання приведені нижче.

З даного графіка видно, що в момент пуску відбувається значний скачок струму, що може привести до спрацьовування максимального токового захисту, а також приводить до зносу двигуна і значних перевантажень у момент пуску.
З даного графіка видно, що при прямому пуску відбувається скачок моменту, а це може привести до пориву стрічки, а також значним перевантаженням двигуна. Як відомо, стрибки моменту дуже небезпечні для двигунів і тому при запуску їх намагаються застосувти різні засоби для м'якого пуску двигуна.
З даного графіка також видно, що в момент пуску відбувається скачок частоти обертання.
При застосуванні апарата плавного пуску АПМ усіх вище приведених недоліків можливо уникнути і нижче приведені графіки струму, моменту, частоти обертання при застосуванні плавного пуску приводного двигуна стрічкового конвеєра.

З даного графіка видно, що струм наростає більш повільно, чим при прямому пуску, що сприятливо для двигуна в момент пуску і дозволяє уникнути перевантажень і спрацьовування захистів у момент пуску.
З графіка видно, що при плавному пуску відбувається плавне збільшення моменту двигуна, що значно знижує динамічні навантаження і зводить до нуля можливість пориву стрічки, а це у свою чергу волоче до економії часу і зниженню простоїв через порив конвеєрної стрічки.
З графіка видно, що при плавному пуску відбувається більш плавна зміна частоти обертання і виключаються її стрибки.
При порівнянні графіків при прямому і плавному пуску можна побачити значні відмінності прямого і плавного пуску приводного двигуна стрічкового конвеєра, а також вагомі переваги останнього, що сприятливо позначається на роботі двигуна, конвеєрної стрічки і терміну їхньої служби значно продовжуючи його по порівняння з прямим пуском.
Структурна схема апарата АПМ, у котрий входить система імпульсно - фазового управління (СІФУ) приведена на рис7.
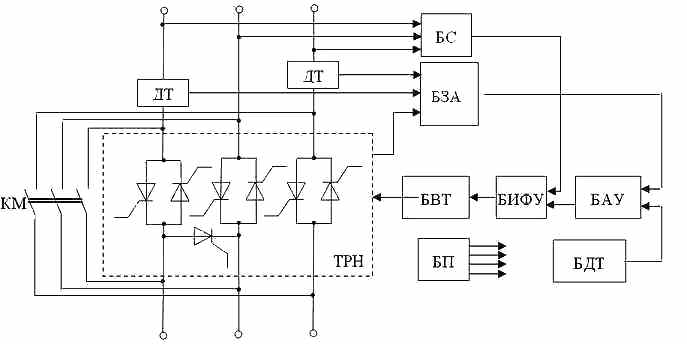
На даній схемі прийняті наступні позначення:
Апарат виконаний у взривонепроніцаємой оболонці серійного автоматичного вимикача АВ-400. Основою апарата є трифазний тиристорний регулятор (ТРН), що складається із шести одноопераційних тиристорів. Сьомий тиристор забезпечує роботу приводного АД в режимі динамічного гальмування. Тиристори розміщені на внутрішній поверхні кришки взривонепроніцаємой оболонки, що забезпечує відвід тепла в зовнішнє середовище. В основному відсіку розташований контактор КМ, шунтирующий тиристори після завершення розгону двигуна. Крім цього в основному відсіку встановлені блоки вихідних трансформаторів (БВТ), автоматичного керування (БАУ), імпульсного - фазового управління (БІФУ), динамічного гальмування (БДТ), захисту апарата (БЗА), живлення (БП), синхронізації (БС) а також датчики струму, температури.[5].
Апарат АПМ забезпечує:
плавний пуск робочого органа конвеєра по заданій програмі з усуненням коливальних динамічних перевантажень і плавним наростанням моменту двигуна;
захист силових тиристорів апарата від перегріву, від струмів К.З., від утрати керування силовими тиристорами при зникненні імпульсів, що відмикають, в одному чи декількох каналах, від утрати фази вхідної напруги.
Робота апарата керування пуском гірської машини конвеєра в режимі плавного пуску здійснюється в такий спосіб.
При включенні роз'єднувача магнітного пускача двигуна конвеєра на апарат керування пуском подається напруга 36 В, про подачу якого сигналізує включений на блоці індикаторів апарата індикатор "ИПЗ".
Після подачі команди на включення конвеєра включається магнітний пускач і трифазна напруга 660/1140 В надходить на вхід апарата (затиски L1, L2, L3).
Починає працювати блок живлення апарата, при цьому на блоці індикаторів апарата висвічиваються індикатори "ИП1", "ИП2", напруга з блоку живлення подається на всі електронні блоки, і починається процес плавного пуску електродвигуна (електродвигунів) конвеєра, про що повідомляють світні індикатори "VSІ", "VS2", "VS4"-"VS7" на блоці індикаторів апарата, що индицируют надходження імпульсів на керуючі електроди відповідних силових тиристорів.
При пуску й у процесі роботи сигнали від датчика швидкості надходять на входи блоку регулятора швидкості і навантаження (БРСН). Далі, сигнали каналу регулятора швидкості з виходу БРСН надходять на вхід блоку імпульсно-фазового управління (БІФУ), де з керуючого сигналу БРСН формуються сигнали, необхідні для керування силовими тиристорами у відповідності зі швидкістю обертання даного електропривода. Ці сигнали надходять на вхід блоку вихідних підсилювачів (БВУ), де формуються, заповнюються сигналом частотою до 2 кГц і підсилюються. Після цього вони надходять на блоки трансформаторів (БВТ) (на первинні обмотки встановлених у них імпульсних трансформаторів).[5].
З вторинних обмоток трансформаторів БВТ керуючі імпульси надходять безпосередньо на входи керуючих електродів силових тиристорів. Крім того, із других вихідних обмоток трансформаторів БВТ сигнали надходять у блок захисту апарата (БЗА) і через нього - у канал індикації, на блок індикаторів (БИ) апарата, що за допомогою светодиодних індикаторів индицирует роботу силових тиристорів.[6].
Крім цих сигналів, на вхід БЗА надходять сигнали від датчиків струму (для пристрою максимального захисту - УМЗ) і сигнали від терморезисторов RK1 - RК3.
Блок БЗА по цих сигналах здійснює захист схеми апарата у випадках:
В усіх випадках блок БЗА за допомогою реле захисту К2 (БИП) відключає пускач, що подає живлення на апарат і включає через блок індикації і пам'яті (БИП) відповідний індикатор на БИ, индицируя причину відключення.
При необхідності апарат плавного пуску може бути переключений у режим прямого пуску (замиканням контакту винесеної кнопки КУ-91-РВ ланцюгів 280 - 281 чи апарата установкою тумблера режиму "Плавний - Прямий" на блоці електронному апарата в положення "Прямий").
У цьому випадку після включення магнітного пускача в апараті включається контактор, шунтирующий своїми головними контактами силові тиристори апарата, у результаті чого на електродвигун конвеєра подається напруга живильної мережі.
Робота апарата в режимі динамічного гальмування (для бремсбергових конвеєрів) здійснюється в такий спосіб: для підготовки апарата до початку динамічного гальмування подається команда на відключення електропривода конвеєра - замикаються іскробезопасні ланцюга 19 - 20 (у камері введень апарата). Після розмикання ланцюгів 19 - 20 апарат перейде в режим динамічного гальмування (при цьому висвічиваються індикатори "VS1", "VS3", "VS5"). Для того щоб виключити гальмування, необхідно замкнути ланцюга 70 - 83 (у камері введень), при цьому апарат розімкне ланцюга блокування пускача, тим самим апарат виключається. Динамічне гальмування можна відключити також безпосереднім вимиканням пускача.[6].
Структурна схема блоку БІФУ буде містити в собі наступні блоки:
Однак блоки імпульсних трансформаторів, блок понижуючих трансформаторів, блок формувача опорної напруги і тиристорного комутатора є окремими блоками апарата АПМ, тому їхній розрахунок не виробляється, і приведення їх на структурній схемі не здійснюється. Структурна схема розроблювального блоку приведена на рис.8.
На структурній схемі прийняті наступні позначення блоків:
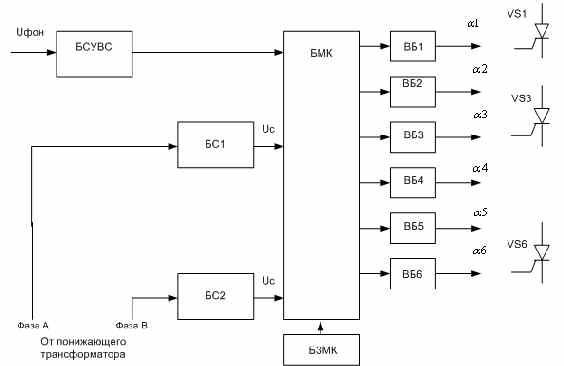
Призначення блоків входячих у структурну схему:
БСУВС - призначений для введення електричного сигналу поступающего від ФОН в мікроконтролер, перетворення і масштабіровання даного сигналу;
БС - служить для виділення моментів переходу синусоїди через нуль, це необхідно для того, щоб правильно відраховувати кут відмикання тиристорів (для синхронізації з мережею);
БЗМК - даний блок здійснює запуск мікроконтролера в роботу (установка частоти роботи МК, скидання);
БМК - блок мікроконтролера, даним блоком є сам МК, що здійснює програмне відпрацьовування програми роботи СІФУ;
ВБ - вихідний блок, служить для посилення сигналу з виходу МК по потужності для того, щоб їм можна було керувати тиристорами.
При розробці функціональної схеми необхідно враховувати раніше прийнятий склад блоків структурної схеми, а також визначитися з їхніми виконуваними функціями й елементами, з яких можна зібрати даний блок. Функціональна схема приведена на рис.9
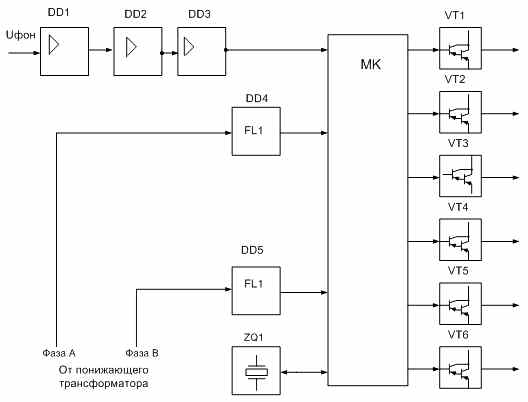
Функціональна схема складається з наступних блоків:
DD2, DD3- блок операційних підсилювачів (інвертирующих), що служать для масштабування сигналу надходячого на МК. Тому що в МК вхідний сигнал не повинний перевищувати 5В, а сигнал, що надходить із ФОН дорівнює максимум 25В, то для його подачі його треба масштабувать. Для цих цілей і служать блоки DD2 і DD3;
DD4, DD5 - компаратори, що служать для визначення моментів переходу синусоїди через нуль. Вони здійснюють порівняння напруги, що надходить з понижуючого трансформатора з нулем;
Блок кристала (ZQ1) - служить для настроювання контролера на задану тактову частоту його роботи, а також його скидання;
VT1 - VT6 - блок транзисторів працюючих у ключовому режимі. Вони служать для посилення сигналу з виходу контролера до необхідної величини, що можуть сприйняти тиристори (їхній керуючі електроди).
Таким чином, схема працює так. При надходженні сигналу з ФОН він через повторювач надходить в операційний підсилювач (інвертирующий), у якому здійснюється масштабування сигналу до максимального значення 5В. Далі сигнал надходить на такий же операційний підсилювач, але тільки з коефіцієнтом підсилення рівним 1. Це необхідно для того, щоб інвертувати сигнал з виходу попереднього операційного підсилювача, що також інвертує. Далі сигнал надходить на МК у який відбувається перетворення сигналу в цифровий код для наступного застосування його в роботі. Також у мікроконтролер надходять сигнали з компараторів, що виконують синхронізацію, тобто визначають моменти переходу синусоїди напруги через нуль. Це нам необхідно для того, щоб правильно відраховувати кут відмикання тиристорів. Формування кута відмикання тиристорів здійснюється мікроконтролером. Далі сигнал з виходу мікроконтролера надходить на транзисторні ключі, що підсилюють сигнал по потужності, для того щоб їм можна було б керувати тиристором.
Блок ІФУ, що призначений для удосконалення апарата керування запуском стрічкового конвеєра АПМ.1У служить для плавного запуску електропривода стрічкового конвейера. Даний блок по порівняння зі старим має більш кращі характеристики, більш високу точність і високу швидкодію.
Також новий блок ІФУ виконаний на новій елементній базі, що зменшило габарити даного блоку, вагу. Застосування мікроконтролера дозволило реалізувати функції СІФК в програмному виді, що більш надійніше, ніж у старому блоці.
Конструкція пристрою виконана із дотриманням всіх вимог, що подаються до апаратури шахтної автоматизації, та являє собою компромис простоти, точності, надійності, зручності експлуатації.
Правила безопасности в угольных шахтах.- Киев, 1996.
Малиновский А.К. «Автоматизированный электропривод машин и установок шахт и рудников». – М.:Недра, 1987
Справочник по автоматизации шахтного конвейерного транспорта/ М.И. Стадник, В.Г. Ильюшенко, С.И. Егоров и др. – К.: Техника, 1992
В.І. Бойко, А.А. Зорі, В.М. Співак та ін. „Мікропроцесори та мікро контролери”. – К.: „Вища школа”, 2004
Маренич К.Н. «Асинхронный электропривод горных машин с тиристорными коммутаторами». – Донецк: ДонНТУ, 1997
Гершунский Б.С. "Справочник по расчету электронных схем"- К.: Вища школа, 1983.
ГОСТ 2.702 – 78. Правила выполнения электрических схем.
Государственный стандарт Украины ДСТУ 3008-95. Документация. Отчеты в сфере науки и техники. Структура и правила оформления.