

| ukr | rus | de | eng |
|
|
1. Введение. Обоснование актуальности
В современных энергосистемах преобладающей нагрузкой являются асинхронные и синхронные двигатели, которые используются в качестве привода для различного типа механизмов. Это обусловлено тем, что асинхронные двигатели с короткозамкнутым ротором являются наиболее простым и надежным типом электропривода. В узлах нагрузки электрических систем асинхронные двигатели применяются на напряжение 0.4 кВ (мощностью до 200 кВт) и на напряжение 6-10 кВ (мощностью от 200 до 8000 кВт). Синхронные двигатели обладают более высоким к.п.д. чем асинхронные, но требуют дополнительных устройств для систем их возбуждения. Они, как правило, применяются на напряжение 6-10 кВ (мощностью до 30 МВт) и, благодаря возможности генерирования реактивной мощности, наибольший экономический эффект при их использовании достигается в том случае, если в узле нагрузки подключены как синхронные так и асинхронные двигатели. 2. Цели и задачи работыЦелью данной работы является рассмотрение возможности использования записи дифференциальных уравнений всех элементов схемы относительно токов, что позволило бы упростить определение как токов элементов, так и узловых напряжений в схеме. При этом ставится задача реализации полученных аналитических выражений для определения узловых напряжений, что исключило бы необходимость решения уравнений методом Гаусса. 3. Предполагаемая научная новизна В электрических системах для питания двигательной нагрузки наиболее часто используют питающиеся от высоковольтных линий электропередач понизительные подстанции с асинхронными, синхронными или с асинхронными
и синхронными двигателями, что необходимо учитывать при разработке математических моделей. 4. Планируемый практический результатРеализация разработанной модели позволит анализировать режимы группового выбега и самозапуска, коротких замыканий и другие переходные режимы узла комплексной нагрузки, содержащего асинхронные и синхронные двигатели и может быть использована как на стадии проектирования, так и эксплуатации узлов энергосистем. 5. Обзор существующих исследований и разработок5.1 Схемы питания и режимы работы узлов электрических систем со смешанной асинхронной-синхронной нагрузкой На многих промышленных предприятиях наряду с использованием асинхронного привода одновременно используется и синхронный привод. Это связано с тем, что синхронные двигатели могут быть использованы как источники реактивной мощности, что способствует поддержанию требуемого уровня напряжения в узлах нагрузки, а также снижению потерь электрической мощности в распределительных сетях. Кроме того, синхронные двигатели имеют более высокий к.п.д. по сравнению с асинхронными, могут изготавливаться на большие номинальные мощности, более низкие номинальные скорости вращения. Последнее позволяет в ряде случаев отказаться от установки дополнительных редукторов между приводом и механизмом. Применение синхронного привода также возросло благодаря разработке статических преобразователей для их систем возбуждения, вместо ранее использовавшихся электромашинных систем. Наряду с положительными сторонами применение синхронного привода имеет также и отрицательные. К ним относятся возможность выпадения двигателей из синхронизма при посадках напряжения, поддержка качаний, возникающих в асинхронных режимах работы энергосистем, увеличение токов подпитки места короткого замыкания. При этом также повышаются требования к необходимости сокращения перерывов питания, применения более быстродействующих релейных защит и автоматики. Необходимость обеспечения успешного самозапуска двигателей в ответственных установках требует применения таких режимов как автоматическая разгрузка и ресинхронизация. 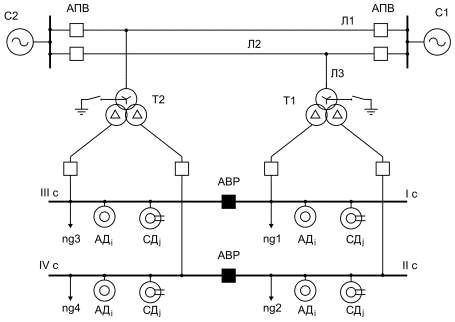 Рисунок 1 - Типовая схема узла нагрузки энергосистемы Она состоит из питающих энергосистем С1 и С2 с соответствующими ЭДС Е1, Е2, линий межсистемных связей Л1, Л2 и линий Л3, Л4 подключенных глухой отпайкой к линиям Л1, Л2 для питания через понижающие трансформаторы Т1, Т2 двигательной и статической нагрузки на напряжении 6-10 кВ. Каждый из трансформаторов Т1, Т2 содержит две расщепленные обмотки низшего напряжения и имеет схему соединений Y / A/ A. В такой схеме будем рассматривать симметричные и несимметричные короткие замыкания и кратковременные перерывы питания на стороне высшего (110-330кВ) и низшего (6-10кВ) напряжений. В этом разделе ставится задача разработки математической модели такого типового узла нагрузки. 5.2 Математическая модель для анализа переходных процессов на основе дифференциальных уравнений элементов схемы, представленных в трехфазной системе координат Особенностью разрабатываемой математической модели является то, что она предназначена для анализа как симметричных, так и несимметричных режимов работы, поэтому наиболее целесообразно использовать ее математическое описание в трехфазной системе координат. 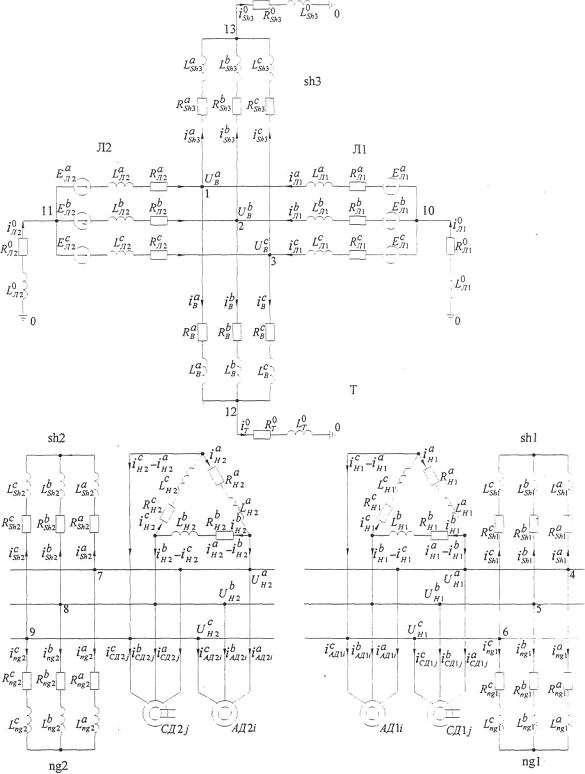 Рисунок 2 - Схема замещения системы Как видно из схемы замещения системы (рис.2) она содержит, кроме базисного нулевого узла 13 узлов и 34 ветви для статических элементов, а также на каждой секции по n присоединений для асинхронных двигателей и m присоединений для синхронных двигателей. Положительные направления токов и напряжений ветвей указаны на схеме стрелками. Для определения токов и напряжений ветвей за основу принят метод узловых напряжений. Последние находятся из решения системы алгебраических линейных уравнений, которая получена из выражений первого закона Кирхгофа для производных от узловых токов. Для понижения порядка указанной системы уравнений с 13 до 9 выразим токи в ветвях заземлений нейтралей через сумму соответствующих фазных токов и определив через них напряжения узлов схемы 10 - 13, учтём их затем в уравнениях обмотки высшего напряжения трансформатора, линий Л1, Л2, шунта sh3. После определения узловых напряжений переменные состояния будем находить из численного решения методом Рунге-Кутта 4-го порядка дифференциальных уравнений отдельных элементов схемы. 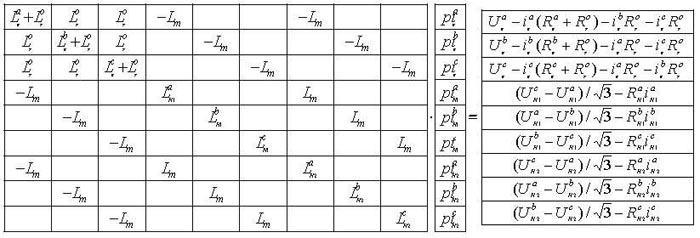 Дифференциальные уравнения элементов сети высшего напряжения, шунта sh3 линий межузловых связей с их питающими системами, имеющими заземлённые нейтрали, в фазной системе координат a, b, c, о имеют вид:   Для решения систем уравнений, приведенных выше, относительно производных токов необходимо найти обратную матрицу индуктивностей трансформатора, шунта с элементами, линий с элементами и умножить их на соответствующие правые части уравнений. Тогда эти уравнения будут приведены к форме Коши и их можно будет решать известными методами, но уже относительно токов. 5.3 Пример расчета переходного процесса в узле нагрузки с асинхронными и синхронными двигателями с помощью разработанной моделиРазработанная модель позволяет рассчитывать и анализировать различного вида симметричные и несимметричные переходные процессы в узле нагрузки, состоящим из произвольного числа асинхронных и синхронных двигателей. Например, расчёт режима заданного вида короткого замыкания производится соответствующим изменением сопротивлений шунта на время длительности короткого замыкания. После расчёта режима группового выбега двигателей на короткое замыкание и восстановления доаварийных значений шунта, производится расчёт режима самозапуска двигателей. Моделирование режимов группового выбега двигателей после отключения источника питания по причине, не связанной с возникновением к. з., производится увеличением сопротивлений обмоток высшего напряжения питающего трансформатора Т. При этом фиксируется величина, частота и фаза напряжений на секциях, токи и мощности отдельных двигателей, что позволяет оценить взаимообмен энергией и общий характер поведения узла двигательной нагрузки. Моделирование режимов повторной подачи напряжения на выбегающие двигатели позволяет определить возникающие значения токов и моментов и дать оценку допустимости этих режимов в зависимости от фазы подаваемого напряжения и успешности самозапуска.  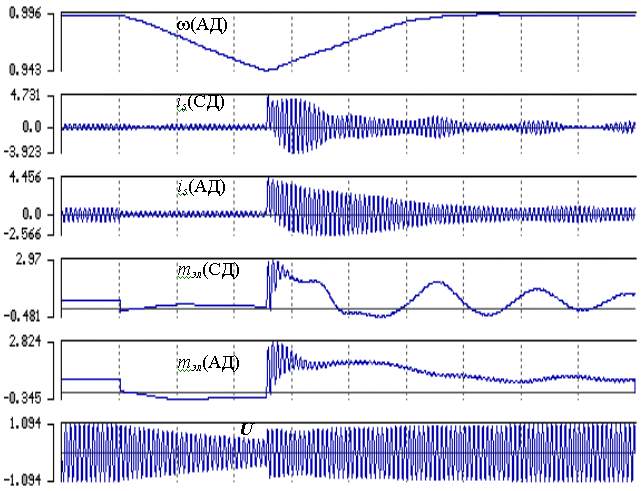 Рисунок 3 - Поведение СД и АД при отключении питания секции на 0.64 с В настоящее время в ряде работ [10, 7, 6, 9, 15, 16] предлагается для продления срока службы двигателей уменьшать воздействия ударных токов и моментов при возникновении кратковременных перерывов питания. Для этой цели имеются разработки устройств быстродействующего синхронного АПВ и АВР. Разработанная программа позволяет моделировать указанные режимы при различных углах сдвига фазы и уровня остаточного напряжения на двигателях по отношению к напряжению источника питания. В качестве примера на рис. 4. 3 приведены результаты моделирования кратковременного перерыва питания и последующего режима самозапуска двигателей секции блока 300 МВт, к которой был подключён асинхронный двигатель (АД) привода дымососа (Рн =1700 кВт) и синхронный двигатель (СД) шаробарабанной мельницы (Рн =2000 кВт). Механизмы работали в установившемся режиме с коэффициентом загрузки 0,5. Как видно из осциллограммы, после отключения питания возник режим группового выбега, в котором синхронный двигатель продолжал потреблять активную мощность, а асинхронный двигатель перешел в генераторный режим. Повторная подача напряжения питания произошла, когда сдвиг по фазе между напряжениями сети и секции работы комплексной двигательной нагрузки был достигнут примерно за 2,5 составил порядка 365°. Последующий установившийся режим с. При моделировании этого же режима с углом расхождения фаз 180° значения ударных токов и моментов существенно превосходят указанные на рис. 3, что подтверждает необходимость использования в системах электроснабжения с двигательной нагрузкой устройств синхронной повторной подачи напряжения питания. 6. Перечень переменных проблем, задач, вопросов При выполнении магистерской работы рассматриваются следующие вопросы: 7. Собственные результаты Планируется разработать и реализовать на языке Visual C++ алгоритм приведенных в п.5 моделей, позволяющий расcчитывать режимы группового и индивидуального выбега, самозапуска для разных видов двигательной нагрузки. 8. ЗаключениеПосле выполнении магистерской работы будет возможен анализ режимов группового выбега и самозапуска, коротких замыканий и другие переходные режимы узла комплексной нагрузки, содержащего асинхронные и синхронные двигатели. По полученному остаточному напряжению питающей секции можно будет говорить об успешности самозапуска, что позволит правильно подобрать оборудование на стадии проектирования и верно оценить переходные процессы при эксплуатации. 9. Литература
1. Чабан В.И. Основы теории переходных процессов электромашинных систем. - Львов: Вища школа. Изд-во при Львов. ун-те, 1980. - 200 с. |