Synchronmaschinen wurden zunächst als Einphasengeneratoren gebaut, die etwa ab der Mitte des vorigen Jh. zur Versorgung von Beleuchtungsanlagen verwendet wurden. Einen ersten dreiphasigen Synchrongenerator entwickelten im Jahre 1887 unabhängig voneinander F. A. Haselwander und Bradley. In der Folgezeit bildeten sich mit der Schenkelpolmaschine und dem Turbogenerator weitere Formen eines Synchrongenerators aus. Charles E. Brown gilt als Erfinder des später entwickelten Walzenläufers mit einer auf Nuten am Umfang verteilten Erregerwicklung
Die Weiterentwicklung der Synchronmaschine hängt eng mit dem Ausbau der elektrischen Energieversorgung und der immer größeren Generator-Einheitsleistung zusammen. Synchronmotoren wurden vor allem dort verwendet, wo man eine konstante Antriebsdrehzahl benötigte, oder die Möglichkeit des Phasenschieberbetriebs nutzen wollte, also in Industrie und Gewerbebetrieben.
Als Industrieantrieb hat der Synchronmotor durch die Entwicklung der Frequenz-umrichter stark an Bedeutung gewonnen. Heute wird er deshalb auch als drehzahl-regelbarer Antrieb vom Bereich der Servomotoren bis zu Motoren mit größten Leistungen gebaut. Als Beispiel soll ein 30 MW-Hochofengebläse mit Synchron-motor und Anfahrumrichter genannt werden. Im MW-Bereich verwendet man Synchronmotoren auch als Antriebe für Zementmühlen, Förderanlagen und Walz-gerüste. Häufig angewendet wird der Synchronmotor heute vor allem als Kleinstmotor in Uhren, Phonogeräten und in der Feinwerktechnik.
Den Betrieb eines Asynchronmotors haben wir aus der Wechselwirkung der Felder des induzierten Läuferstroms und des Ständerstroms abgeleitet. Genauso kann man sich die Funktion eines Synchronmotors vorstellen. Der entscheidende Unterschied besteht darin, daß bei einem Synchronmotor das Läuferfeld nicht erst durch Induktion hergestellt werden muß. Da der Läufer bereits als Magnet ausgebildet ist, ist das Läuferfeld bereits vorhanden. Der Magnet des Läufers stellt sich, wie eine Kompaß-nadel im Magnetfeld der Erde, entsprechend der Richtung des durch die Ständer-wicklung erzeugten Drehfeldvektors ein. Dadurch wird der Läufer in Rotation versetzt. Es muß ebenfalls kein Läuferstrom induziert werden, d.h. der Synchronmotor benötigt keine Drehzahldifferenz zwischen Drehfeld und Läufer. Der Läufer bewegt sich nämlich mit der gleichen Drehzahl wie das Drehfeld. Diese Drehzahl wird auch Synchrondrehzahl genannt. Daraus wiederum kann man den Namen Synchronmotor ableiten.
Der bei weitem wichtigste Synchronmotor ist der Innenpolmotor. Sein Läufer heißt auch Polrad (siehe Bild 5.3 b)). Bei sehr kleinen Maschinen ist das Polrad meist ein Dauermagnet. Bei größeren Motoren wird es immer als Elektromagnet ausgeführt und über eine Gleichstromquelle gespeißt. Wegen des genauen Synchronismus zwischen Drehzahl und Drehfeld hat der Synchronmotor vor allem eine Anwendung in kleineren Leistungsbereichen gefunden, z.B. Uhrenantriebe. Im mittleren Leistungsbereich sind Synchronantriebe seltener. Bei höheren Antriebsleistungen hingegen treffen wir den Synchronmotor vermehrt an. Er erbringt hier Leistungen von mehreren MW und wird vor allem als Antrieb für Kompressoren und Pumpen verwendet.
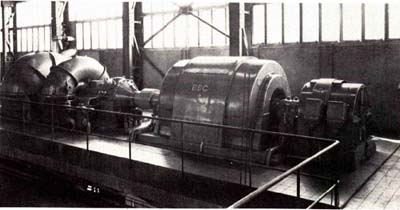
Ein Synchronmotor ist nicht in der Lage von selbst anzulaufen. Deshalb benötigt er spezielle Anlaufhilfen (= Motoren), die ihn auf die Nenndrehzahl bringen. In Bild 5.19 sehen wir in der Mitte den Synchronmotor, rechts daneben den Hilfsmotor.