Альтернативной задачей для большинства электроприводов горных машин является обеспечение плавности разгона электроприводов. Этот вопрос, тем более важен, что основная масса таких электроприводов оснащена асинхронными короткозамкнутыми электроприводами.
В настоящее время широко применяются следующие виды пуска асинхронного двигателя: пуск прямой подачей напряжения, переключением со звезды на треугольник, система плавного пуска и преобразователь частоты.
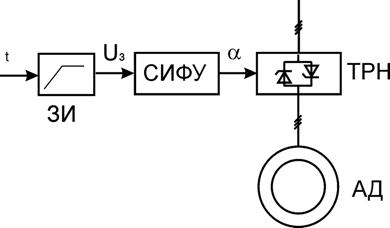
Как известно контакторный пуск весьма динамичен, что обусловлено взаимодействием вынужденной и свободной составляющей магнитного потока электродвигателя на начальной стадии разгона, вследствие чего имеет место бросок тока и момента. Альтернативным техническим решением является применение тиристорного регулятора напряжения в замкнутых или разомкнутых системах управления разгоном привода. Учитывая практическую актуальность применения подобных систем, их исследование представляется также актуальным.
Анализируя данный способ управления разгоном привода необходимо заметить, что регулирование напряжения на выходе последнего осуществляется путем варьирования угла включения входящих в его состав тиристоров. Поскольку для асинхронного двигателя значение максимального (критического) момента находится в квадратичной зависимости от напряжения питающей сети,
 |
диапазон регулирования скорости в системах скалярного управления несколько ограничен, и важным местом в обосновании целесообразности такого способа регулирования скорости занимает, в первую очередь, оценка возможности обеспечения необходимой перегрузочной способности системы электропривода. Так же следует обратить внимание на снижение величины
 |
пускового момента приводного асинхронного двигателя, поскольку эта величина так же находится в квадратичной зависимости от напряжения питающей сети не менее важным показателем в обосновании целесообразности применения ТРН, занимает, во вторую очередь, оценка кратности пускового момента и как следствие, возможности пуска приводного двигателя для описанного способа регулирования скорости.
 |
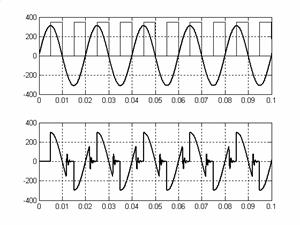
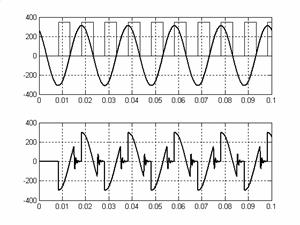
а) б)
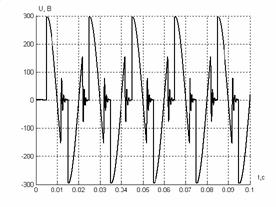
 , а фазные напряжения сети сдвинуты относительно друг друга на 120о (см. рис.4). При изменении угла управления
, а фазные напряжения сети сдвинуты относительно друг друга на 120о (см. рис.4). При изменении угла управления