Разработка алгоритма контроля местоположения комбайна в очистном забое
Удовик О. В.; Гавриленко Б. В., доц., к.т.н.
(Донецкий национальный технический университет, г. Донецк, Украина)
В настоящее время на очистных комбайнах применяют системы управления на базе промышленных контроллеров с реализацией блочной структуры [1]. Функциональные возможности системы управления могут быть расширены за счет контроля местоположения комбайна и модернизации его программного обеспечения. Структурная схема предлагаемого устройства контроля местоположения комбайна представлена на рисунке 1, а разработанный алгоритм его работы на рисунках 2 и 3.
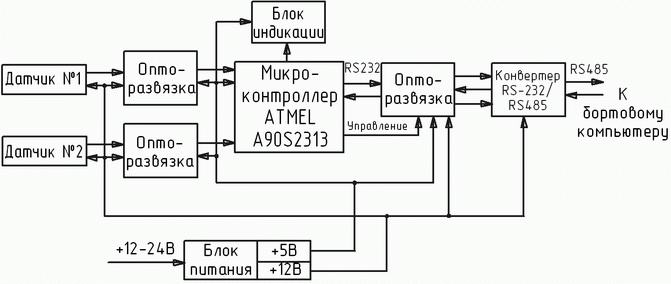
Рисунок 1 Структурная схема устройства контроля местоположения
Программно работа устройства контроля местоположения включает два основных фрагмента: обработку сигналов запросов состояния по информационному интерфейсу RS485 и работа по прерыванию, во время которой устройство определяет пройденный путь, скорость и направление перемещения комбайна. После подачи на устройство питающего напряжения основная программа (рисунок 2) выполняется без остановки. При старте программы по интерфейсу RS485 определяется наличие запроса бортового контроллера о состоянии датчиков контроля местоположения. Если полученный запрос не относится к соответствующему модулю системы, то устройство управления на него не реагирует и возвращает систему в исходное состояние, для ожидания нового запроса.
При поступлении в схему устройства контроля местоположения соответствующего адреса определяется вид запроса по: состоянию датчиков, местоположению и скорости перемещения комбайна; установке в контроллере нового местоположения; установке нового значения пройденного комбайном пути за один импульс dL; установке нового адреса и скорости связи по интерфейсу RS485.
После определения вида запроса устройство формирует ответный сигнал и выдает его в RS485.
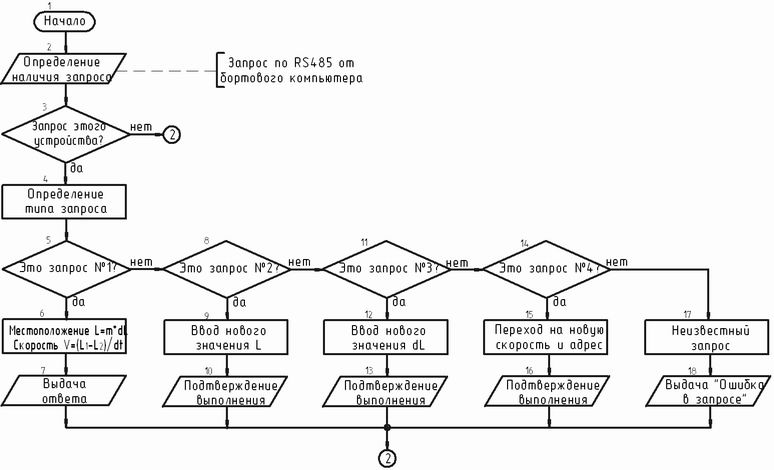
Рисунок 2 . Алгоритм работы основной программы. Типы запросов: №1 . запрос состояния (местоположение, состояние датчиков, скорость); №2 . установка заданного местоположения; №3 . установка нового значения dL; №4 . установка нового адреса, скорости связи.
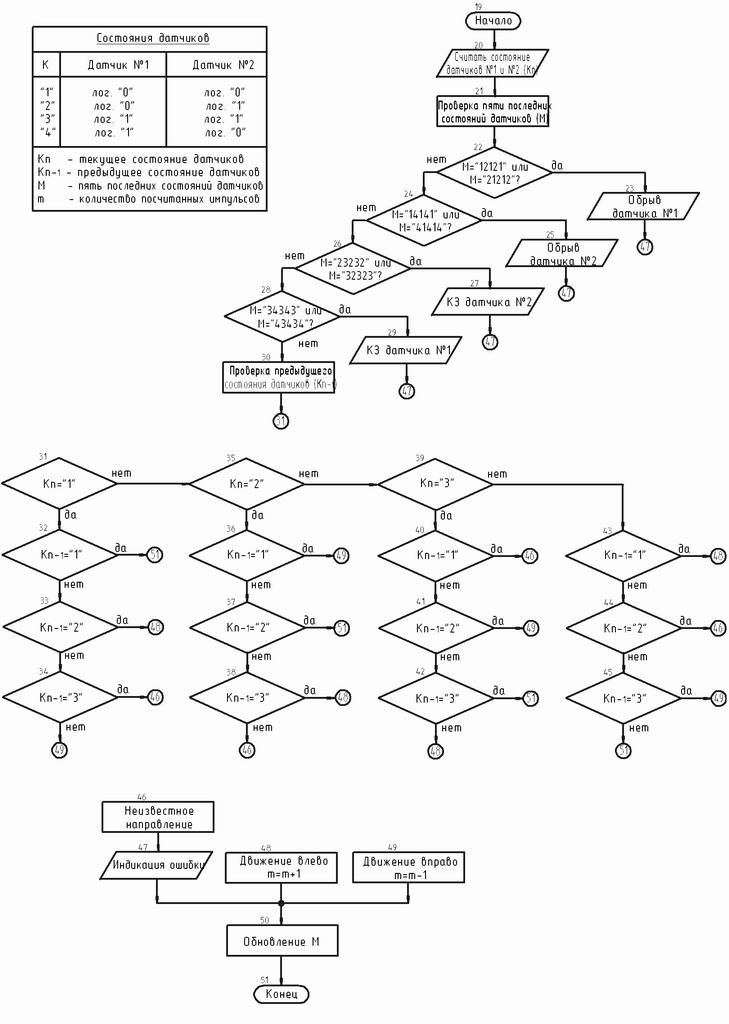
Далее по прерыванию от системного таймера происходит переход из основной программы в программу работы по прерыванию (рисунок 3), во время работы которой считывается текущее состояние датчиков и проверяется пять их последних состояний. Если пять последних состояний являются аварийными (короткое замыкание или обрыв линии связи одного из датчиков), то устройство выдает информацию на блок индикации о неисправности датчика и подготавливает информацию для формирования ответа на запрос состояния устройства. В случае если пять последних состояний не являются аварийными, то происходит проверка предыдущего состояния. Если текущее состояние датчиков совпадает с предыдущим, то это означает, что комбайн не перемещается и направление его движения не известно. В течение последующих 2-3 секунд устройство сохраняет информацию о предыдущем направлении движения комбайна. При большей длительности времени формируется сигнал об остановке комбайна. При разных текущем и предыдущем состояниях датчиков определяется направление движения комбайна и в зависимости от этого его местоположение. Таким образом, разработанное устройство обеспечивает достоверный контроль местоположения комбайна.