ENG | RUS
Generators and Motors
http://www.dromeydesign.com/articles/generators_and_motors.htm
Introduction
The presence of generators and large motors in distribution systems imposes certain limitations on the performance of these systems for both steady state, transient and fault conditions. The representation of these machines must be appropriate for each type of analysis. A full and complex transient model is not normally considered necessary for the distribution environment because of the radial nature of distribution system feeders and the fact that interaction between generators at different locations is very limited.
However, the varying nature of machine reactances must be accounted for in computing short circuit currents over the first few seconds after fault initiation. Generators and motors comprise both synchronous and asynchronous (induction) machine types.
It is convenient to represent generators and motors, both synchronous and asynchronous, using the same concepts. The differences are related primarily to whether the machine shaft receives mechanical torque to generate electrical power as a generator or imparts mechanical torque to the shaft by virtue of the electrical power supplied to the stator as a motor. Synchronous machines require some form of excitation applied to its rotor that forces the machine to operate at a fixed speed linked to system frequency (synchronous speed). Asynchronous machines operate either above synchronous (super-synchronous) speed as generators or below synchronous (sub-synchronous) speed as motors. Asynchronous motors are taken to be of induction type since this is the most common form for large motors.

An asynchronous generator operates typically at no more than 1-1.5% slip above synchronous speed (zero slip). Considered initially as a motor operating at negative slip (Figure 1), the mechanical shaft torque is produced by the electrical system input. If the shaft is now driven from an external source, such as a gas turbine, the slip reduces to zero when the energy taken from the electrical system is zero. A further increase in shaft input produces a positive slip and the machine now supplies energy to the system.
Voltage Support
Large motors supplied directly from the supply voltage without a step-down transformer are not common. Induction motors impose a large reactive power demand when starting and it is usual to provide so called soft-start capabilities to minimize this demand until the machine has attained full speed, otherwise the voltage depression during starting may well be unacceptable. Asynchronous generators are driven up to synchronous speed before being connected to the system and the initial large reactive power demand required for motors at starting is avoided. The reactive power demand at steady load for both generators and motors is nevertheless considerable and full consideration must be given to the availability of this support at peak system load. It is common to install some capacitive compensation at the machine terminals to alleviate the reactive power demand.
One particular situation that requires consideration is the case where an induction motor is started on a busbar that has other running induction motors or an induction generator connected. The starting reactive power demand of the motor, and the additional reactive power demand from the other machines when the busbar voltage is reduced by the starting condition, can give rise to voltage instability where the voltage cannot recover but continues to drop. While a full transient analysis is desirable, it is possible to use approximate equivalent models of the running motors or induction generator in order to determine whether this form of instability will occur
If the asynchronous generator in the above example were to be replaced by a synchronous generator with an automatic voltage regulator (AVR), the response of the AVR to the voltage depression increases the generator reactive power output which contributes to the reactive power demand of the starting motor and limits the transient voltage drop. While the synchronous generator is more expensive for a given MVA size than the asynchronous machine, it can improve transient voltage conditions and resolve many system voltage problems because of this voltage regulating capability (see below). .
Very large motors are usually of synchronous type because of their ability to generate their own reactive power needs and also supply reactive power for other loads. These motors function like synchronous generators in terms of their response to voltage disturbances and have a stabilizing influence on conditions at the connecting busbar provided that they are fitted with an automatic voltage regulator
Stability
When synchronous generators are introduced into a distribution system, they are sited ideally where the impedance between the supply source and the machine terminals is low. The generator can be considered as another source. In the event of a fault, the displacement between supply and generator terminal voltage vectors increases and the vectors can oscillate or 'swing' against each other in the immediate post-fault time period, causing instability if the electrical displacement between the vectors becomes too great. This occurs when the fault is close enough to the generator that the consequent voltage drop at the generator terminals removes significant electrical load from the machine and it accelerates to increase the electrical displacement or rotor angle between itself and the supply. Low impedance between supply and generator permits the flow of substantial synchronizing power after a fault has been removed and minimizes the displacement between these voltages.
Synchronizing power is simply the power that flows in either direction between supply and generator as a result of the electrical displacement between them and exerts a damping influence on machine oscillations. The expression for the real power flowing between two sources is:
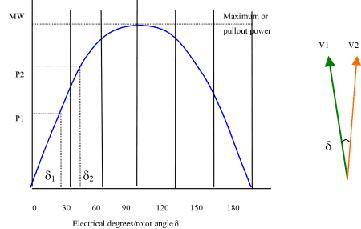
This is represented in Figure 2 where V1 and V2 are the voltage vectors of the generator and supply respectively, d is the angle between V1 and V2 and X is the reactance between sources. Increasing the mechanical power input to the machine increases the angle from d1 to d2 and the power output of the generator increases from P1 to P2. Conversely, as load demand increases on the machine, the angle will increase to accommodate the load change provided that sufficient mechanical power input is available. Clearly, as the angular difference between the two sources changes from positive to negative and back to positive during fault conditions, synchronizing power will flow to achieve a stable condition. This happens eventually when the angular displacement is positive and the electrical power delivered from the generator equals the mechanical input to the shaft, minus losses. Instability occurs only when the synchronizing power is insufficient to contain the angle d and the generator accelerates out of synchronism.
It is possible to connect synchronous generation some distance from the supply busbar but the generation size is somewhat limited because the increase in the reactance X in the above expression limits the synchronizing power available. Power output is also limited by the angular displacement (d) since the practical limit on d to assure stability for maximum power output is about 70-750.
A special condition associated with synchronous generation connected within a distribution system is the potential for inadvertent disconnection from the supply due to a fault. Unless the machine is disconnected automatically for this condition, the output frequency will likely drop when the machine attempts to supply local load and it will be disconnected by protection when the frequency drops sufficiently. If the generator is asynchronous, the removal of the supply as a source of excitation makes the machine incapable of generating and it will be shut down automatically
Voltage Regulation
The voltage regulating capability of a synchronous generator AVR has a significant effect upon the voltage and short circuit currents produced in the event of a fault on a feeder, and on the generator stability. The AVR acts to maintain the set voltage by increasing excitation; this, in turn, increases the synchronizing power available and also increases the fault current contribution to any fault. If no AVR action were to take place, the fault contribution from the generator would reduce rapidly and it is possible that the generator fault infeed current would not be sufficient to disconnect the generator when it is necessary to do so.
Invariably, high-speed AVR equipment is fitted to newer machines and can contribute positively to the operation of synchronous generators in a distribution system. This is particularly so if the generator is required to absorb reactive power for certain loading conditions when the generator rotor angle approaches 900. The ability to use the generator for voltage control is affected significantly by the choice of tap setting for the generator transformer, where it exists. Unless a load tap change is fitted, the most suitable tap setting for the range of reactive power supplied can be determined only by a loadflow analysis. In any event, loadflow analyses become mandatory when generation is present to achieve full flexibility of operation with and without the generator connected.