УДК 621.313.333.001.4
КОСВЕННЫЙ КОНТРОЛЬ НЕРАВНОМЕРНОСТИ ВОЗДУШНОГО
ЗАЗОРА АСИНХРОННЫХ МАШИН
Г. Г. РОГОЗИН, канд. техн. наук, Н. С. ЛАПШИНА, инж.
Донецкий государственный технический университет
e-mail автора rgg@elf.dgtu.donetsk.ua
Повышение надежности асинхронных машин является одной ил актуальных задач промышленной энергетики. Большое значение при этом имеют вопросы обеспечения допустимой степени неравномерности воздушного зазора. Эксцентриситет определяется как мера нарушения симметрии воздушного зазора по результатам непосредственных его замеров в торцевых частях расточки статора по известной формуле

где ![]() –
соответственно средняя и максимальная величины воздушного зазора.
–
соответственно средняя и максимальная величины воздушного зазора.
Из-за относительной малости воздушного зазора этот показатель оказывается весьма чувствительным к деформации замков станины, подшипниковых щитов и выработке подшипников машины в процессе эксплуатации. При наличии несимметрии воздушного зазора, как известно, снижается пусковой момент, растут одностороннее магнитное притяжение и вибрация ротора, снижается из-за увеличения потерь в стали к. п. д. асинхронной машины. Указанные явления обусловливаются неравномерностью распределения приложенного напряжения между катушками фаз и нарушением симметрии фазных токов статора, что приводит к росту высших гармоник в магнитном потоке воздушного зазоре и увеличению индуктивностей машины.
Влияние несимметрии воздушного зазора на электромагнитные
параметры анализировалось для случая параллельного расположения всей
ротора и расточки статора путем использования результатов графоаналитической
аппроксимации кривой затухания постоянного тока в обмотке статора двигателя
экспоненциальным рядом н расчета синхронного индуктивного сопротивления ![]() .
.
В настоящей работе излагаются вопросы методики контроля несимметрии воздушного зазора, основанного на интегрировании переходной функции в опыте затухания постоянного тока в обмотке статора с помощью операционных усилителей. Рассматриваются случаи параллельного и произвольного относительного расположения осей ротора и расточки статора.
Применение интегрирующих устройств для измерения синхронных индуктивных сопротивлений существенно снижает трудоемкость и увеличивает достоверность косвенного контроля неравномерности воздушного зазора асинхронных двигателей. Сущность рассматриваемых измерений основана на следующем.
При замыкании накоротко обмотки статора асинхронной
машины потокосцепление фазной обмотки статора за время спадания тока от
исходного значения ![]() до
нуля изменится на величину
до
нуля изменится на величину
![]() (1)
(1)
Магнитный поток, обусловленный протеканием постоянного
тока ![]() в обмотках
машины, неподвижен относительно контуров ротора и, следовательно, определяет
индуктивность, соответствующую синхронному индуктивному сопротивлению, npи
скольжении ротора, равном нулю. Таким образом, интегрируя уравнение равновесия
э. д. с при замыкании накоротко обмотки статора
в обмотках
машины, неподвижен относительно контуров ротора и, следовательно, определяет
индуктивность, соответствующую синхронному индуктивному сопротивлению, npи
скольжении ротора, равном нулю. Таким образом, интегрируя уравнение равновесия
э. д. с при замыкании накоротко обмотки статора
 (2)
(2)
в пределах от 0 до ∞
 (3)
(3)
где ![]() - сопротивление
контура затухания на фазу, Ом.
- сопротивление
контура затухания на фазу, Ом.
При измеренной в опыте затухания постоянного тока величине
полного сопротивления контура затухания ![]() в случае
использования двухфазной схемы питания обмотки статора
в случае
использования двухфазной схемы питания обмотки статора ![]() , а для трехфазнной –
, а для трехфазнной – ![]() . Расчетное
выражение для определения синхронного индуктивного сопротивления (в
относительных единицах) с помощью интегрирующих устройств имеет следующий вид:
. Расчетное
выражение для определения синхронного индуктивного сопротивления (в
относительных единицах) с помощью интегрирующих устройств имеет следующий вид:
 (4)
(4)
где ![]() – величина начального тока в фазной обмотке
статора,
– величина начального тока в фазной обмотке
статора, ![]() – базисное сопротивление, Ом;
– базисное сопротивление, Ом; ![]() – сопротивление токоизмерительного шунта. Ом;
– сопротивление токоизмерительного шунта. Ом; ![]() – переходная функция падения напряжения на шунте, В.
– переходная функция падения напряжения на шунте, В.
Интегральная функция в (4) измеряется вольтметром, подключенным к выходу операционного усилителя. На вход последнего, работающего в режиме интегратора, напряжение подается с шунта, включенного в контур затухания постоянного тока ъ обмотке статора. Схема измерений синхронного индуктивного сопротивления, требования к аппаратуре и интегрирующему устройству рассматривались в [Л. 4]. Следует отметить, что при измерении синхронного индуктивного сопротивления с использованием трех фаз обмотки статора перед началом опыта необходимо проверять равномерность распределения постоянного тока в соединённых параллельно фазных обмотках.
|
|
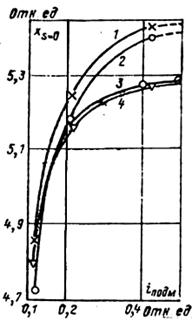
Рис. 1. Зависимость синхронного индуктивного сопротивления от величины тока предварительного подмагничивания (ε = 0 i0 = 2,5 А) 1 - при питании фаз АС обмотки статора: 2 -фаз ВС; 3 - фаз АСВ; 4 – фаз - АВ. |
Рис. 2. Зависимость синхронного индуктивного сопротивления от неравномерности эазора асинхронных двигателей 1 – АО2-51-2 статора: 2 –МТ-11-6; 3 – ДАЗ0-16-51-4. |

Как известно, изменение синхронного индуктивного сопротивления при увеличении эксцентриситета асинхронных машин имеющих одну пару полюсов или параллельное соединение катушечных групп фазных обмоток статора при число полюсов больше двух, определяется, главным образом, ростом рассеяния обмотки статора. Если катушечные группы соединены последовательно, то при числе полюсов mр>4 синхронное индуктивное сопротивление асинхронных машин при увеличении относительной неравномерности зазора на каждые 20% растет примерно на 5%.
При исследовании методики контроля неравномерности воздушного зазора асинхронных машин авторами использовались усилители аналоговых машин. Для анализа влияния предварительного подмагничивания магнитопровода асинхронных машин постоянным током интегральные измерения производились при питании обмотки статора по двухфазной и трехфазной схемам. Это влияние оказывается_весьма значительным. Например, для двигателя A02-51-2 (10 кВт, 380 В, 19.4 А, cosφ– 0,89) при питании фаз АС и изменении тока предварительного подмагничивания с 3 до 10 А увеличение синхронного индуктивного сопротивления двигателя составило 11% (рис. 1).
Отклонение значений ![]() измеренных
при двухфазной схеме соединении фаз обмотки статора, от среднего значения при
измеренных
при двухфазной схеме соединении фаз обмотки статора, от среднего значения при ![]() = 10 А (0.42 отн. ед.) для фаз АВ, АС и ВС соответственно
равно 1.9; –1,2 и –0,6%. При оценке влияния предварительного подмагничивания в
двух- и трехфазной схемах соединений обмотки статора учитывалось, что равенство
и. с. от тока статора п этих схемах выполняется при соблюдении следующего
известного условия:
= 10 А (0.42 отн. ед.) для фаз АВ, АС и ВС соответственно
равно 1.9; –1,2 и –0,6%. При оценке влияния предварительного подмагничивания в
двух- и трехфазной схемах соединений обмотки статора учитывалось, что равенство
и. с. от тока статора п этих схемах выполняется при соблюдении следующего
известного условия:
![]() (5)
(5)
Приведенные данные указывают на необходимость сопоставления базовых (исходных) и контрольных результатов измерений, проводимых для оценки неравномерности зазора, только при одинаковых схемах соединении обмотки статора.
Влияние неравномерности воздушного зазора на синхронное индуктивное сопротивление двигателей с числом полюсов равным и больше двух показано на рис. 2. Опыты проводились при снятых крышках двигателей и различных величинах эксцентриситета при параллельном расположения осей расточки статора и ротора. Один из опытов выполнялся при установке ротора непосредственно на сталь расточки статора. Из-за наличия технологических отклонений в размерах внутреннего диаметра листов стали пакета статора и некоторого смещения отдельных листов друг относительно друга значение эксцентриситета в последнем случае принималось равным 90%.
Установлено, что количественный характер изменения синхронного
сопротивления двигателей практически не зависит от выбора фазных обмоток
статора, Для .двигателя с одной парий полюсов, как следует из рис. 2 (кривая 1),
изменение эксцентриситета в диапазоне от 10 до 90% приводит к пропорциональному
увеличению индуктивных сопротивлений ![]() примерно на
3%. Измерения проводились при 10-кратном повторении опытов для каждого значения
эксцентриситета. Наибольшие отклонения отдельных замеров от средних значений
находились в пределах 0,5%. Изменение синхронного индуктивного сопротивления в
данном случае практически соизмеримо с предельной относительной погрешностью
единичного измерения. Действительно, если измерения сопротивлений контура затухания
й шунта производить по методу вольтметра – амперметра приборами класса 0,2, то
предельная относительная погрешность определения этих сопротивлений может составить
0.4%. Измеряя напряжение на выходе интегратора и начальное значение тока
в контуре затухания приборами того же класса., можно получить предельную
погрешность при определении индуктивного сопротивления, разную 1,2%. В связи с
этим применение инегральных измерений для контроля воздушного зазора асинхронных
машин, имеющих mр = 2 или параллельное
соединение катушечных групп фаз обмотки статора нецелесообразно. В этих
случаях для оценки эксцентриситета следует использовать величину сопротивления
к. з., определяемого из опыта однофазного питания неподвижной машины.
примерно на
3%. Измерения проводились при 10-кратном повторении опытов для каждого значения
эксцентриситета. Наибольшие отклонения отдельных замеров от средних значений
находились в пределах 0,5%. Изменение синхронного индуктивного сопротивления в
данном случае практически соизмеримо с предельной относительной погрешностью
единичного измерения. Действительно, если измерения сопротивлений контура затухания
й шунта производить по методу вольтметра – амперметра приборами класса 0,2, то
предельная относительная погрешность определения этих сопротивлений может составить
0.4%. Измеряя напряжение на выходе интегратора и начальное значение тока
в контуре затухания приборами того же класса., можно получить предельную
погрешность при определении индуктивного сопротивления, разную 1,2%. В связи с
этим применение инегральных измерений для контроля воздушного зазора асинхронных
машин, имеющих mр = 2 или параллельное
соединение катушечных групп фаз обмотки статора нецелесообразно. В этих
случаях для оценки эксцентриситета следует использовать величину сопротивления
к. з., определяемого из опыта однофазного питания неподвижной машины.
Для определения синхронных индуктивных сопротивлений
асинхронных двигателей ДАЗО-1659-4 (1250 кВт; 6000 В; 148,5 А; соs φ= 0,85) и МТ-11-6 (2,2
кВт; 300 В; 7,2 А; ![]() -
0,72), имеющих соответаственно две и три пары полюсов и последовательное
соединение катушечных групп фаз обмотки статора, интегрирование переходной
функции падения напряжения на шунте в обоих случаях производилось по двухфазной
схеме соединений обмоток статора. Изменение индуктивного сопротивления
двигателя ДАЗО-16-59-4 в опытах без предварительного подмагничивания
-
0,72), имеющих соответаственно две и три пары полюсов и последовательное
соединение катушечных групп фаз обмотки статора, интегрирование переходной
функции падения напряжения на шунте в обоих случаях производилось по двухфазной
схеме соединений обмоток статора. Изменение индуктивного сопротивления
двигателя ДАЗО-16-59-4 в опытах без предварительного подмагничивания ![]() ) при изменении зазора на
90% составило 17,8% (рис. 2, кривая 2). Для двигателя МТ-11-6 в опытах с
предварительным подмагничиванием постоянным током. равным 3 А, и последующим
монотонным понижением его до
) при изменении зазора на
90% составило 17,8% (рис. 2, кривая 2). Для двигателя МТ-11-6 в опытах с
предварительным подмагничиванием постоянным током. равным 3 А, и последующим
монотонным понижением его до ![]() =2 А (
=2 А (![]() ) изменение индуктивного
сопротивления при изменении эксцентриситета на 90% составляет 18,7%. Полученные при испытаниях относительные изменения индуктивного сопротивления для
обоих типов машин зависят практически только от величину эксцентриситета. При
этом для двигателя МТ-11-6 при токах i0< Iподм абсолютные значение измеряемого
сопротивления не зависят от начальной величины постоянного тока, а для двигателя
ДАЗО-16-59-4, опыты затухания постоянного тока для которого проводились без
предварительного подмагничивания, оказываются зависимыми. Это объясняется тем,
что в первом случае при осуществлении предварительного подмагиничивания стали
магиитопровода процесс спадания тока в обмотках статора (для указанного
соотношения между значениями i0 и Iподм) происходит в условиях размагничувания
магнитопровода по нисходящей ветви одного и того же частного цикла гистерезисной
кривой. Решающее значение при этом имеет тот факт, что переходный процесс заканчивается
при одинаковых остаточных значениях индукции и магнитной проницаемости.
) изменение индуктивного
сопротивления при изменении эксцентриситета на 90% составляет 18,7%. Полученные при испытаниях относительные изменения индуктивного сопротивления для
обоих типов машин зависят практически только от величину эксцентриситета. При
этом для двигателя МТ-11-6 при токах i0< Iподм абсолютные значение измеряемого
сопротивления не зависят от начальной величины постоянного тока, а для двигателя
ДАЗО-16-59-4, опыты затухания постоянного тока для которого проводились без
предварительного подмагничивания, оказываются зависимыми. Это объясняется тем,
что в первом случае при осуществлении предварительного подмагиничивания стали
магиитопровода процесс спадания тока в обмотках статора (для указанного
соотношения между значениями i0 и Iподм) происходит в условиях размагничувания
магнитопровода по нисходящей ветви одного и того же частного цикла гистерезисной
кривой. Решающее значение при этом имеет тот факт, что переходный процесс заканчивается
при одинаковых остаточных значениях индукции и магнитной проницаемости.
При сдвиге ротора вдоль оси вала изменение величины
индуктивного сопротивления (при е=0) наступает только при перемещениях более
чем на ±4 мм, что объясняется соотношением длин активных частей статора и
ротора машины. Таким образом, изменение в возможных пределах (±2,5 мм) осевого сдвига в подшипниковых узлах собранного двигателя не оказывает влияния на измеряемую
величину. Результаты измерений синхронного индуктивного сопротивления асинхронных
машин при установленных и снятых щитах практически не отличаются друг от друга.
С целью обеспечения большей стабильности результатов измерений при mр ≥ 4 следует рекомендовать (рис.1), чтобы ![]() . При
. При ![]() сопоставляемые при оценке
несимметрии воздушного зазора значения синхронных индуктивных сопротивлений
необходимо измерять при одинаковых величинах тока предварительного подмагничивания.
Начальные значения тока затухания для предотвращения нагревания обмоток
двигателя целесообразно выбирать в пределах
сопоставляемые при оценке
несимметрии воздушного зазора значения синхронных индуктивных сопротивлений
необходимо измерять при одинаковых величинах тока предварительного подмагничивания.
Начальные значения тока затухания для предотвращения нагревания обмоток
двигателя целесообразно выбирать в пределах ![]() .
.
Были выполнены также измерения синхронного индуктивного сопротивления при перекосе оси ротора двигателей в вертикальной плоскости относительно объемного центра расточки статора. Предельный перекос в этом случае по величине приращения синхронного индуктивного сопротивления (10,8%) эквивалентен эксцентриситету при параллельном смещении осей ротора и расточки статора, примерно равному 45%.
Анализ результатов измерений и распределения неравномерности
зазора по длине l расточки
статора при параллельном расположении оси ротора и расточки статора, а также
при перекосе оси ротора относительно центра в плоскости одной из крышек или
объемного центра расточки указывает на связь синхронного индуктивного
сопротивления с интегральной характеристикой вида  .
.
Величина эксцентриситета в приведенном выражении является функцией координаты сечения расточки статора по длине последней.
В общем случае влияние пространственного расположения
ротора в расточке статора на измеряемый электромагнитный параметр может быть
оценено по рис. 3, где приведены расчетные зависимости синхронного
индуктивного сопротивления асинхронной машины в функции углового поворота а
линии максимального зазора, построенные в соответствии с гипотезой
пропорциональности синхронного индуктивного сопротивления интегральным
характеристикам  , отражающим распределение эксцентриситета вдоль оси расточки статора машины.
Указанные зависимости построены по расчетным кривым изменения неравномерности
воздушного зазора вдоль оси расточки статора в зависимости от величины
углового поворота линии максимального зазора. Последняя образуется совокупностью
точек на поверхности расточки статора, для которых воздушные зазоры имеют
максимальные значения. Величина углового поворота этой линии определяется по
дуге окружности, получаемой при проецировании линии максимального зазора на
торцевое сечение статора. Результаты экспериментального исследования двигателя
МТ-11-6 показаны на рис. 3 в виде отдельных точек.
, отражающим распределение эксцентриситета вдоль оси расточки статора машины.
Указанные зависимости построены по расчетным кривым изменения неравномерности
воздушного зазора вдоль оси расточки статора в зависимости от величины
углового поворота линии максимального зазора. Последняя образуется совокупностью
точек на поверхности расточки статора, для которых воздушные зазоры имеют
максимальные значения. Величина углового поворота этой линии определяется по
дуге окружности, получаемой при проецировании линии максимального зазора на
торцевое сечение статора. Результаты экспериментального исследования двигателя
МТ-11-6 показаны на рис. 3 в виде отдельных точек.
Как следует из анализа приведенных на рис 3 расчетных
характеристик, зависимость  в зоне угловых значений 0 – 45° изменяется мало;
при 180°≥α≥45° характер кривой близок к линейной зависимости.
в зоне угловых значений 0 – 45° изменяется мало;
при 180°≥α≥45° характер кривой близок к линейной зависимости.

Рис. 3. Зависимость ![]() асинхронного
двигателя от углового поворота линии максимального зазора.
асинхронного
двигателя от углового поворота линии максимального зазора.
1 – неравномерности в торцевых сечениях расточки статора равны соответственно -100 и +100%;
2 – -100 и +75%; 3 – -100 и +50%; 4 – -100 и +25%; 5 – -100 и 0%.
Минимальная величина повышения синхронного индуктивного с учетом всех возможных произвольных положений ротора в расточке статора при значении эксцентриситета в одном из торцевых сечений, равном 100%, составляет около 8%. Последняя соответствует значению в во втором торцевом сечении расточки, равному 50% (кривая 3). Кривые 1–5 получены при ступенчатом уменьшении (с дискретностью 25%) величины е во втором сечении от 100 до 0%.
Таким образом, допустимое значение эксцентриситета асинхронной машины с учетом установленного значения минимального повышения синхронного индуктивного сопротивления может быть косвенно оценено по формуле

где ![]() – погрешность
измерения, отн. ед.;
– погрешность
измерения, отн. ед.; ![]() – синхронное
индуктивное сопротивление исходного опыта при эксцентриситете, равном нулю,
отн. ед.;
– синхронное
индуктивное сопротивление исходного опыта при эксцентриситете, равном нулю,
отн. ед.; ![]() – коэффициент запаса.
– коэффициент запаса.
Очевидно, что для положительной оценки работоспособности
машины по величине эксцентриситета необходимо, чтобы индуктивное сопротивление,
измеренное интегратором в процессе контрольной проверки (при начальных условиях
исходного опыта), не превышало хвоа. При принятии коэффициента
запаса равным 1,5 и выполнении измерений с погрешностью в пределах ±1,2%, как
следует из (7), отклонение синхронного индуктивного сопротивления ![]() от значения
от значения ![]() измеренного в исходном опыте, не должно превышать 4,5%.
измеренного в исходном опыте, не должно превышать 4,5%.
Неточности обработки конструктивных узлов отдельных машин в процессе их изготовления могут приводить к различию в синхронных индуктивных сопротивлениях, что подтверждается разбросом (до 10%) значений тока х. х. у однотипных асинхронных двигателей. Это обстоятельство, в свою очередь, может обусловливать низкую корреляционную связь между эксцентриситетом и величиной синхронного индуктивного сопротивления при использовании метода для технической диагностики асинхронных машин на заключительной стадии их производства.
Однозначная связь указанных характеристик устанавливается в эксплуатации путем экспериментального определения синхронного индуктивного сопротивления отдельных машин при заданных начальных условиях в опыте затухания постоянного тока и ε=0.
Метод интегральных измерений целесообразно использовать а первую очередь при организации периодического контроля неравномерности воздушного зазора асинхронных машин тех механизмов, к которым предъявляются повышенные требования по надежности эксплуатации. При этом измерения для контроля воздушного зазора могут осуществляться также через кабельные линии из помещений электрических распределительных устройств, что важно, например, при установке двигателей в зонах повышенной активности атомных промышленных установок.