ББК 31.291
Ч-61
УДК 62-83(075.8)
Чиликин М.Г., Сандлер А.С.
Общий курс электропривода: Учебник для вузов. - 6-е изд., доп. и перераб. - М.: Энергоиздат, 1981. - 576 с., ил.
Стр. 161-166.
4.12. Частотное регулирование асинхронных электроприводов
Принципиальная возможность регулирования угловой скорости асинхронного двигателя изменением частоты питающего напряжения вытекает из формулы . При регулировании частоты также возникает необходимость регулирования амплитуды напряжения источника, что следует из выражения
. При регулировании частоты также возникает необходимость регулирования амплитуды напряжения источника, что следует из выражения . Если при неизменном напряжении изменять частоту, то поток будет изменяться обратно пропорционально частоте. Так, при уменьшении частоты поток возрастет и это приведет к насыщению стали машины и как следствие к резкому увеличению тока и превышению температуры двигателя; при увеличении частоты поток будет уменьшаться и как следствие будет уменьшаться допустимый момент.
. Если при неизменном напряжении изменять частоту, то поток будет изменяться обратно пропорционально частоте. Так, при уменьшении частоты поток возрастет и это приведет к насыщению стали машины и как следствие к резкому увеличению тока и превышению температуры двигателя; при увеличении частоты поток будет уменьшаться и как следствие будет уменьшаться допустимый момент.
Для наилучшего использования асинхронного двигателя при регулировании угловой скорости изменением частоты необходимо регулировать напряжение одновременно в функции частоты и нагрузки, что реализуемо только в замкнутых системах электропривода. В разомкнутых системах напряжение регулируется лишь в функции частоты по некоторому закону, зависящему от вида нагрузки.
Частотное регулирование угловой скорости электроприводов переменного тока с двигателями с короткозамкнутым ротором находит все большее применение в различных отраслях техники. Например, в установках текстильной промышленности, где с помощью одного преобразователя частоты, питающего группу асинхронных двигателей, находящихся в одинаковых условиях, плавно и одновременно регулируются их угловые скорости. Примером другой установки с частотно-регулируемыми асинхронными двигателями с короткозамкнутым ротором могут служить транспортные рольганги в металлургической промышленности, некоторые конвейеры и др.
Частотное регулирование угловой скорости асинхронных двигателей широко применяется в индивидуальных установках, когда требуется получение весьма высоких угловых скоростей (для привода электрошпинделей в металлорежущих станках с частотой вращения до 20 000 об/мин).
Экономические выгоды частотного регулирования особенно существенны для приводов, работающих в повторно-кратковременном режиме, где имеет место частое изменение направления вращения с интенсивным торможением.
Для осуществления частотного регулирования угловой скорости находят применение преобразователи, на выходе которых по требуемому соотношению или независимо меняется как частота, так и амплитуда напряжения. Преобразователи частоты можно разделить на электромашинные и вентильные. В свою очередь электромашинные преобразователи могут быть выполнены с промежуточным звеном постоянного тока и непосредственной связью. В последних используют коллекторную машину переменного тока, на вход которой подают переменное напряжение с постоянной частотой и амплитудой, а на выходе ее получают напряжение с регулируемой частотой и амплитудой. Электромашинные преобразователи с непосредственной связью практического применения не получили.
Принципиальная схема электромашинного преобразователя с промежуточным звеном постоянного тока, в котором используется синхронный генератор, показана на рис. 4.44. Преобразователь состоит из агрегата постоянной скорости (Ml, G1), предназначенного для преобразования переменного тока сетевого напряжения и неизменной частоты в регулируемое постоянное напряжение, которое зависит от тока возбуждения генератора постоянного тока G1. Двигатель постоянного тока М2 агрегата переменной скорости получает питание от генератора G1. При изменении напряжения на выводах генератора G1 плавно регулируется угловая скорость двигателя М2 и одновременно угловая скорость синхронного генератора G2. Изменение угловой скорости генератора G2 при неизменном токе его возбуждения приводит к пропорциональному изменению скорости, частоты и амплитуды напряжения генератора G2.
От синхронного генератора G2, являющегося источником напряжения с переменной частотой и амплитудой, питается один или группа асинхронных двигателей с короткозамкнутым ротором МЗ — М5. Меняя направление тока возбуждения генератора постоянного тока G1, можно изменять направление вращения асинхронных двигателей. При неизменном токе возбуждения синхронного генератора G2 и двигателя постоянного тока М2, меняя его угловую скорость, можно автоматически регулировать выходное напряжение по закону U2/f2 = const. В данном случае, как будет показано далее, со снижением частоты снижается перегрузочная способность асинхронных двигателей и поэтому диапазон регулирования при постоянном моменте нагрузки заметно уменьшается. Больший диапазон регулирования с обеспечением необходимой перегрузочной способности (по отношению к статическому моменту нагрузки) может быть получен при вентиляторной нагрузке.
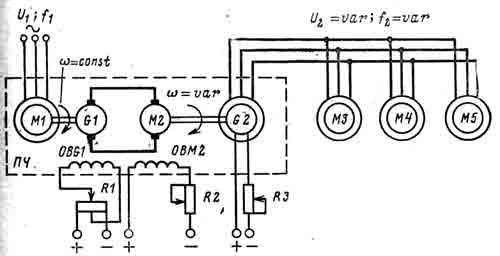
Рис. 4.44. Принципиальная схема электромашинного преобразователя частоты с промежуточным звеном постоянного тока с использованием синхронного генератора.
Угловая скорость двигателя постоянного тока М2 при номинальной ЭДС генератора G1 может быть увеличена за счет уменьшения тока возбуждения двигателя М2 с помощью резистора R2, при этом частота и амплитуда напряжения синхронного генератора G2 также возрастают, но допустимый момент двигателя М2 уменьшается.
Независимо от частоты (угловой скорости) синхронного генератора G2 амплитуда напряжения на его выходе может регулироваться только вниз от номинального значения.
Если мощность, потребляемая асинхронными двигателями от источника регулируемой частоты, равна Рном, то при пренебрежении потерями в машинах общая установленная мощность преобразователя частоты составит:
С учетом потерь энергии в машинах преобразователя частоты его установленная мощность будет превышать четырехкратное значение установленной мощности нагрузки, что является недостатком электромашинного преобразователя частоты. Другим его недостатком является низкий КПД, определяемый произведением КПД отдельных машин. Если, например, КПД каждой машины при полной нагрузке принять равным 0,9, то номинальный КПД преобразователя составит 0,94 = 0,66. С уменьшением нагрузки и при регулировании угловой скорости двигателей МЗ — М5 вниз от основной КПД становится еще меньше.
Регулирование частоты связано с преодолением значительной механической и электромагнитной инерционности, которой обладает электромашинный преобразователь.
В схемах электромашинного преобразователя частоты могут быть использованы в качестве основного преобразователя обычные асинхронные машины с фазным ротором в режиме асинхронного преобразователя частоты. Одна из таких схем с асинхронным преобразователем частоты АПЧ приведена на рис. 4.45. Здесь статор АПЧ присоединен к сети переменного тока через автотрансформатор AT, позволяющий независимо регулировать на входе (и выходе) АПЧ амплитуду напряжения. Ротор АПЧ механически связан с якорем двигателя М2, угловая скорость которого регулируется по системе Г—Д так же, как и в предыдущей схеме с синхронным генератором. Вторичная (роторная) цепь АПЧ служит источником напряжений регулируемой частоты и амплитуды.
Частота на выходе АПЧ равна:
 (4.66)
(4.66)
где ;
; — скорость двигателя М2; f1 — частота напряжения питания статора, принятая равной частоте питающей сети.
— скорость двигателя М2; f1 — частота напряжения питания статора, принятая равной частоте питающей сети.
В (4.66) знак плюс относится к случаю, когда ротор вращается против поля статора, а знак минус — согласно с полем статора. Следовательно, при вращении ротора против поля частота f2>f1, согласно с полем f2 < f1. При неподвижном состоянии ротора АПЧ частота f2=f1.
Энергия, передаваемая АПЧ нагрузке, при вращении против поля складывается из механической энергии, поступающей с вала двигателя М2, и электрической энергии, потребляемой АПЧ со стороны автотрансформатора AT. При вращении по полю электрическая энергия, поступающая в статор АПЧ, частично передается нагрузке, а часть — двигателю М2, в этом случае работающему в генераторном режиме. Эта часть энергии после преобразований возвращается в сеть с помощью машины M1.
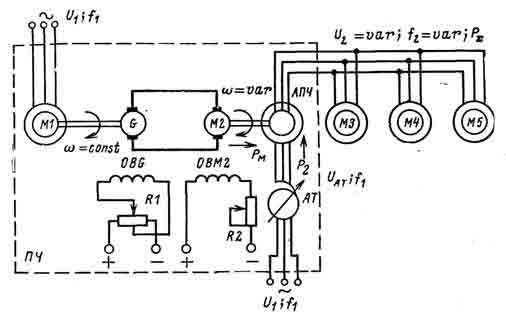
Рис. 4.45. Схема с асинхронным преобразователем частоты.
Распределение активных мощностей, поступающих с вала двигателя постоянного тока Рм и со стороны питающей сети Р2, происходит (без учета потерь в АПЧ) пропорционально частотам статора и ротора, т. е.
 (4.67)
(4.67)
 (2.68)
(2.68)
или
 (2.69)
(2.69)
где Р — суммарная мощность, потребляемая на выходе АПЧ.
— суммарная мощность, потребляемая на выходе АПЧ.
Если, например, принять частоту на выходе АПЧ f2 = 100 Гц, а частоту питания f1 = 50 Гц, то активная мощность Р2 составит только 50 % установленной мощности нагрузки, а через двигатель М2 будет подводиться также 50 % Р. Таким образом, при указанном соотношении частот установленная мощность машин системы Г—Д окажется вдвое меньше, чем в случае электромашинного преобразователя с синхронным генератором. Раздельное регулирование напряжения с помощью автотрансформатора AT дает возможность (ограничиваемую насыщением стали АПЧ) устанавливать требуемое соотношение между U2 и f2.
Если установленную мощность асинхронных двигателей (нагрузки АПЧ) принять равной Рном, то, пренебрегая потерями в машинах преобразовательного агрегата, можно найти установленную мощность преобразователя частоты (при f2 = 100 Гц и f1 = 50 Гц):
С возрастанием выходной частоты АПЧ установленная мощность преобразовательного устройства увеличивается.
Электромашинные преобразователи частоты с АПЧ применяются обычно для получения частот, превышающих частоту питающей сети, когда необходимо регулировать угловую скорость большого числа согласованно работающих асинхронных двигателей с короткозамкнутым ротором.