ББК 31.29
Б 28
УДК 658.011.56(075.32):622
Батицкий В. А., Куроедов В. И., Рыжков А. А.
Автоматизация производственных процессов и АСУ ТП в горной промышленности: Учеб. для техникумов. - 2-е изд., перераб. и доп. - М.: Недра, 1991. - 303 с.: ил.
Стр. 42-44.
2. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ НАГРУЗКИ ВЫЕМОЧНЫХ МАШИН
Нагрузка на привод выемочной машины (очистного комбайна, струга) определяется силами сопротивления на органах разрушения и погрузки, которые зависят от характеристик разрушаемого массива и величин и соотношений скоростей подачи и резания. Рассмотрим некоторые варианты автоматического регулирования нагрузки горных машин: 1) изменением скорости подачи; 2) изменением скорости резания; 3) изменением скоростей подачи и резания.
Автоматическое регулирование машины по первому варианту основано на линейной зависимости подводимой мощности Р от скорости подачи vп:
Р=А+Вvп,
где А - мощность холостого хода машины при отсутствии резания; В - коэффициент сопротивления угля резанию.
При изменении коэффициента В подводимую мощность двигателя можно сохранить неизменной путем соответственного изменения скорости подачи vп. Это наиболее простой способ регулирования, который осуществляется с помощью специального авторегулятора, встраиваемого и машину.
По второму варианту осуществляется регулирование нагрузки угольного струга за счет изменения скорости его перемещения (скорости резания) вдоль забоя. Мощность, подводимая к приводу струга, определяется по формуле:
Р=Fvp /
где F - суммарная сила сопротивления перемещению струга; vp — скорость перемещения (скорость резания) струга; - КПД привода.
Для поддержания мощности Р на заданном уровне необходимо, чтобы при изменении сил сопротивления F перемещению струга скорость его движения Fvp изменялась обратно пропорционально этим силам, т.е. чтобы было постоянным их произведение vп= const. Такое изменение скорости струга возможно только при использовании регулируемого привода.
Наиболее эффективным считается регулирование горных машин по третьему варианту, так как при этом можно обеспечить максимальную производительность машины при минимальных удельных энергозатратах и лучшей сортности угля. Для работы горной машины в таком режиме автоматическое регулирование ее нагрузки должно производиться путем одновременного изменения скоростей резания и подачи. В этом случае отношение скоростей vр/vп может быть постоянным (параметрическая стабилизация) или регулируемым в процессе работы (экстремальное регулирование). Параметрическая стабилизация работы горной машины может быть осуществлена при применении регулируемого привода, автоматически обеспечивающего плавное ступенчатое или бесступенчатое регулирование скоростей резания vр, и подачи vп. Автоматизация выемочных машин при этом не требует сложных систем регулирования. При экстремальном регулировании регулятор должен анализировать конкретные горнотехнические условия и на основе удельных энергозатрат выбирать оптимальное соотношение скоростей. Авторегулятор представляет собой в этом случае сложное кибернетическое устройство.
Существующие очистные комбайны не оборудованы устройством для плавного изменения скорости резания, поэтому регулирование работы двигателя производится при помощи авторегуляторов, поддерживающих заданную нагрузку двигателей путем изменения только скорости подачи, т.е. по первому варианту.
Качество процесса регулирования и конструкция авторегулятора зависят от правильного выбора регулируемой величины, которая должна иметь однозначную связь с нагрузкой двигателя и легко измеряться быстродействующим высокочувствительным датчиком простой конструкции. В качестве регулируемых могут быть приняты следующие величины: мощность, подводимая к двигателю от сети; ток двигателя; скольжение или температура обмоток двигателя; момент на валу двигателя; усилие подачи.
Чаще всего в качестве регулируемого параметра принимают ток двигателя, так как это позволяет использовать в качестве датчиков нагрузки трансформаторы тока, создавая простые по конструкции и удобные в настройке и управлении регуляторы.
Система автоматического регулирования нагрузки горных машин путем изменения скорости подачи, упрощенная функциональная схема которой показана на рис. 1.1, состоит из объекта регулирования очистного комбайна и авторегулятора нагрузки. Авторегулятор нагрузки состоит из чувствительного элемента (датчика 2 тока), элемента сравнения 2, задающего устройства 4, усилителя 5, электрогидравлического преобразователя (соленоида 6 с золотником), воздействующего на гидравлический насос 7 комбайна. При изменении нагрузки на режущий орган, например при ее увеличении вследствие повышения крепости угля, затупления резцов или по другим причинам, возрастает ток I приводного электродвигателя 1, что приводит к возрастанию напряжения U1 на выходе датчика 2. На элементе сравнения 3 появляется разность напряжений  которая усиливается усилителем 5 и подается на соленоид 6. Последний перемещает золотник, и от вспомогательного плунжерного насоса под цапфу гидронасоса 7 поступает масло, в результате чего эксцентриситет его изменяется так, что скорость гидродвигателя 8 (скорость подачи комбайна) уменьшается, и значение нагрузки возвращается к заданному.
которая усиливается усилителем 5 и подается на соленоид 6. Последний перемещает золотник, и от вспомогательного плунжерного насоса под цапфу гидронасоса 7 поступает масло, в результате чего эксцентриситет его изменяется так, что скорость гидродвигателя 8 (скорость подачи комбайна) уменьшается, и значение нагрузки возвращается к заданному.
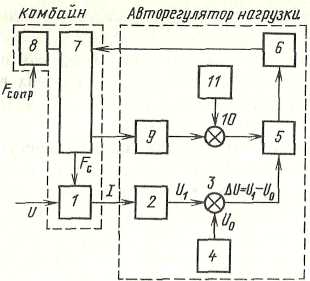
Рисунок 1.1 – Функциональная схема системы авторегулирования нагрузки горных машин
Для регулирования скорости подачи система имеет контур управления, который содержит датчик скорости 9, элемент сравнении 10 и за-датчик скорости 11 для задания уставки максимального значения скорости подачи. Кроме того, для улучшения качества процесса регулирования современные регуляторы обычно имеют корректирующие звенья и специальные устройства, задающие импульсные режимы процесса регулирования (на схеме не показаны). Такие авторегуляторы встраивают в гидравлические механизмы подачи 1Г405.
Автоматическое регулирование нагрузки может обеспечить увеличение производительности машины при правильно заданной величине нагрузки, которую должен поддерживать регулятор. Обычно заданное значение нагрузки устанавливают в пределах 60—100% часовой мощности двигателя или принимают равным уставке номинального тока.