Рис 6 – управляющее поле фрейма.
Рис 7 – поле подтверждения фрейма данных.
| ДонНТУ || Магистры ДонНТУ | Индивидульное задание Перечень ссылок Отчет о поиске Библиотека | RU EN UKR |
В настоящее время одной из актуальных проблем – является проблема автоматизации производства. Эта проблемы наиболее часто выражается в необходимости модернизации технически устаревшего оборудования. Как правило, модернизация оборудования заключается в создании распределенной системы управления. Причем переход разработчиков систем АСУ к применению распределенных сетевых технологий обусловлено тем, что в большинстве случаев становиться экономически целесообразной установка на промышленном объекте нескольких локальных контроллеров, объединенных в единую сеть, чем прокладка разветвленных кабельных сетей. Стоимость работ по установке, тестированию, вводу в эксплуатацию и сопровождению централизованной системы выше, так как в централизованной системе большее количество проводных соединений чем в распределенной. Многократно возрастает вероятность ошибки при монтаже проводников, сложность поиска и устранения неисправностей, а также сложность реконфигурации системы.
При построении распределенных систем остро возникает проблема выбора способа построения системы управления, которая бы наиболее эффективно отвечала таким качествам как цена, простота, надежность, гибкость. К настоящему времени создано более 250 различных систем. Однако часть из них уже морально устарела, другие оказались избыточными и чрезвычайно дорогими. К тому же ставшие стандартом микроконтроллеры семейства MCS–51 и аппаратно совместимые с ними AVR, которые наиболее часто используются для автоматизации производства, плохо совместимы с большинством из них.
Целью работы является создание протокола обмена системы управления процессом перестройки размеров на перерабатывающей линии Mitsubishi "SUMMIT–100". Также после некоторой модификации данный протокол может применяться для автоматизации производственных процессов на других промышленных объектах.
Этот стандарт соединения оборудования был разработан в 1969 г. рядом крупных промышленных корпораций и опубликован Ассоциацией электронной промышленности США (Electronic Industries Association – EIA). Стандарт RS–232 в общем случае описывает четыре интерфейсные функции:
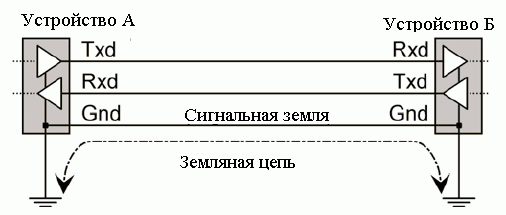
Интерфейс RS–232 является последовательным асинхронным интерфейсом. Последовательным он называется потому, что передача осуществляется по единственной линии. Стандартом для интерфейса RS232 определены 25 линий, для передачи используют линию TxD, для приема RxD, а SG сигнальная земля. Остальные линии в предназначены для тестирования, управления потоком, синхронизации, выбора частоты, обнаружения несущей и тд. Проектировщики электронных устройств на микроконтроллерах чаще используют лишь 3 линии (TxD, RxD, SG), иногда добавляют линию для обозначения занятости канала или другую по усмотрению.
Для синхронизации битам данных предшествует специальный стартовый бит, после битов данных следует бит паритета и один или два стоповых бита. Такая группа битов совместно со стартовым и стоповым битом, а также битом паритета носит название старт–стопного символа.
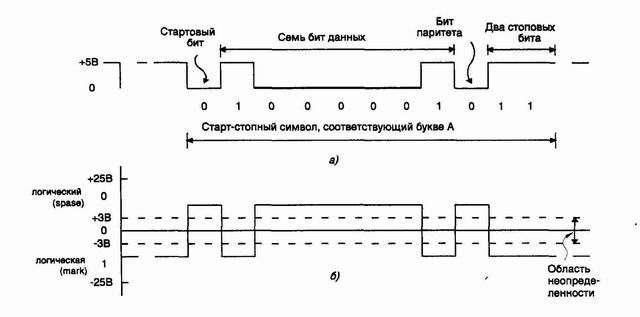
Таким образом, полный асинхронно передаваемый символ данных состоит из 10–11 бит при том, что собственно пользовательские данные состоят из 7–8 бит. Используемые в интерфейсе RS–232 уровни сигналов отличаются от уровней сигналов ТТЛ. Логический 0 (SPACE) представляется положительным напряжением в диапазоне от +3 до +25В, а логическая 1 (MARK) – отрицательным напряжением в диапазоне от -3 до -25В. На рис. показан асинхронный сигнал для буквы А в том виде, в каком он присутствует на линиях TxD или RxD интерфейса RS–232. Большинство современных микроконтроллеров поддерживает данных интерфейс, но для его функционирования необходимо преобразовывать уровни сигналов ТТЛ в сигналы которые присутствуют на линии RS–232. Для этих целей используют специальные микросхемы, например фирмы MAXIM – Max232 или ее аналоги. Вследствие воздействия помех, активного и реактивного сопротивления соединительного кабеля между устройствами передатчиком и приемником существуют ограничения на его длину. Официальное ограничение по длине для соединительного кабеля по стандарту RS–232 составляет порядка 15м при скорости передачи около 20 Кбит/с. Однако на практике это расстояние может быть значительно больше и зависит от скорости передачи данных. В табл. 3.3 приведены значения длины соединительного кабеля, определенные McNamara (Technical Aspects of Data Communications, Digital Press, 1982).
Таблица 1 – длина соединительного кабеля между приемником и передатчиком для протокола RS232
| Скорость передачи, бит/с | Максимальная длина для экранированного кабеля, м | Максимальная длина для неэкранированного кабеля, м |
| 110 | 1525 | 915 |
| 300 | 1525 | 915 |
| 1200 | 915 | 915 |
| 2400 | 305 | 152 |
| 4800 | 305 | 76 |
| 9600 | 76 | 76 |
При использовании интерфейсов RS–232 необходимо учитывать, что например в ПК сопротивление между сигнальной и реальной землей очень маленькое, тогда в случае если устройства питаются от разных источников через землю возможно протекание тока что, может привести к повреждению устройств. Решение данной проблемы является гальваническая изоляция (развязка), при этом используется либо частичная развязка, либо полная.
Также вследствие того, что интерфейс несбалансированный, у него слабая помехозащищенность. К тому же, как видно из таблицы, интерфейс обеспечивает малую скорость передачи на средние и большие расстояния из–за длительного перезаряда емкости линии связи. То есть для дальней и быстрой передачи необходимо использовать дорогостоящий кабель, либо оптико–волоконную связь. Все вышеперечисленные проблемы приводят к тому, что интерфейс мало пригоден для промышленного применения.
Более новыми стандартами, по сравнению с RS–232, позволяющими обеспечить высокоскоростную работу на больших расстояниях, являются стандарты EIA RS–422A, RS–485, RS–423A и RS–449. Эти стандарты были совместно разработаны двумя ассоциациями производителей: Ассоциацией электронной промышленности (EIA – Electronics Industries Association) и Ассоциацией промышленности средств связи (TIA – Telecommunications Industry Associastion). Стандарт EIA RS485 определяет только электрические и физические характеристики интерфейса. Стандарты RS–485 и RS–422 имеют много общего, и поэтому их часто путают. RS–485, определяет двунаправленную полудуплексную передачу данных, является единственным стандартом EIA/TIA, допускающим множественные приемники и драйверы в шинных конфигурациях. EIA/TIA–422, с другой стороны, определяет единственный однонаправленный драйвер с множественными приемниками.
В соответствии со стандартом RS485 несколько устройств соединяются сбалансированной витой парой. Устройства могут быть приемными, передающими или комбинированными. На обоих концах кабеля устанавливаються терминаторы (оконечные резисторы) с сопротивлением не менее 60 Ом, номинал которых зависит от волнового сопротивления кабеля(по стандарту 120 Ом)
Работа интерфеса аналогична тристабильной логике шины. Передатчики могут находиться в активном или пассивном состоянии. В поссивном состоянии они являются для сети большой нагрузкой(сопротивлением). В активном состоянии они питают сеть дифференциальным напряжением в пределах от 1.5 до 5.0 В между выходными контактами. Одна полярность соответсвует двоичному "0", т.е. один контакт имеет положительный потенциал по отношению ко второму, а двоичная "1" имеет обратную полярность по отношению к уровню "0". Дифференциальный порог для приемников установлен на уровне 0.2 В при допустимом диапазоне входных напряжений от -7 до +12 В по отношению к земле приемника. На рис представлен передатчик RS485. Для передачи используется 2 линии: А и В, а также сигнальная земля С.
На рис приведен пример сети RS485, которая работает в полудуплексном режиме. Режим работы определятся типом микросхемы.
Большое количество производителей изготавливают микросхемы для RS485 (Maxim, TI, ...) и от характеристик микросхемы зависит максимальное количество
узлов в сети, а также максимальная скорость. Типичное количесво узлов может 32, 128, максимум 256. В некоторых микросхемах реализована оптронная
развязка.
Стандартом определены только физические параметры среды, а протокол передачи им не затронут. Поэтому разработчики вынуждены сами разрабатывать
или применять уже существующие протоколы. Одним из наиболеее используемых протоколов для интерфейса RS485 является протокол ModBus. Отображение протокола
ModBus на модель OSI приведено в табл. 2
Таблица 2 – отображение протокола ModBus на модель OSI
| Уровень | Модель OSI/ISO | Сеть |
| 7 | Прикладной уровень | ModBus Application Protocol |
| 6 | Уровень представления данных | – |
| 5 | Сеансовый уровень | – |
| 4 | Транспортный уровень | – |
| 3 | Сетевой уровень | – |
| 2 | Канальный уровень | ModBus Serial Line Protocol |
| 1 | Физический уровень | EIA/TIA – 485 |
Контроллеры соединяются используя технологию главный–подчиненный, при которой только одно устройство (главный) может инициировать передачу (сделать запрос). Подчиненные (максимум 247 устройств) передают запрашиваемые главным устройством данные, или производят запрашиваемые действия. Типичное главное устройство включает в себя ведущий (HOST) процессор. Типичное подчинненое устройство – программируемый контроллер.
Главный может адресоваться к индивидуальному подчиненному или может инициировать широковещательную передачу сообщения на все подчиненные устройства. Подчиненное устройство возвращает сообщение в ответ на запрос, адресуемый именно ему. Ответы не возвращаются при широковещательном запросе oт главного. Типиный формат кадра:
| Адрес подчиненного |
Код функции |
Данные | CRC |
| 1 байт | 1 байт | 0 – 256 байт | 2 байта |
Адрес подчиненного – поле содержит только адрес подчиненного. Так как в сети по стандарту может быть максимум 247 подчиненных то
допустимые адреса находятся в диапазоне от 1–247. Мастер посылая пакет вкладывает в это поле адрес подчиненного.
Когда подчиненный возвращает ответ, он помещает собственный адрес в это поле, для того чтобы мастер знал от кого пришел ответ.
Код функции – показывает подчиненному какой тип операции необходимо выполнить. Код функции
может следовать за полем данных.
Данные – содержат передаваемые или возвращаемые параметры.
CRC – поле предназначенное для проверки пакета.
Для напасания данного раздела был использован источник [3].
В середине 80–х Robert Bosch GmbH и Intel начали совместные работы над спецификацией и проектированием микросхем для блока, который бы обеспечивал последовательный протокол связи и поддерживал прикладные задачи с распределенным управлением в реальном масштабе времени, далее во все сферы промышленного управления. CAN протокол отличается повышенной помехоустойчивостью, надежностью и обладает следующими возможностями:
САN спецификация не определяет тип физической среды CAN сети. Протокол CAN работает и на витой паре, и на оптоволокне, и на высоковольтной линии 220 В, и радиоканале, и на ИК–канале. Соотношение величины длины кабеля и скорости работы CAN:
Таблица 2 – соотношение скорости и длины кабеля в CAN.
| Скорость передачи, кбит/с | Максимальная длина для кабеля (витая пара), м |
| 1000 | 40 |
| 500 | 130 |
| 250 | 270 |
| 125 | 530 |
| 100 | 620 |
| 50 | 1300 |
| 20 | 3300 |
| 10 | 6700 |
| 5 | 10000 |
СAN протокол распространяется на следующие уровни. Объектный уровень обеспечивает фильтрацию сообщений и обработку сообщений и состояний. Транспортный уровень представляет собой ядро CAN протокола. Он отвечает за синхронизацию, арбитраж, доступ к шине, разделение посылок на фреймы, определение и передачу ошибок и минимизацию неисправностей. Физический уровень определяет, как именно будут передаваться сигналы, их электрические уровни и скорость передачи.
Физический уровень определяется стандартом ISO 11898 и характеризуется следующими возможностями. Дифференциальное включение приемопередатчиков обеспечивает подавление синфазной помехи, при этом уровень сигналов составляет 1/3 от значения напряжения питания, причем само напряжение питания не определяется жестко. Например, типичные значения при напряжении питания +5 В приведены на рис. 1, причем доминирующим уровнем является нижний уровень, а рецессивным, соответственно, верхний. Максимальное расстояние между узлами – до 1 км. Скорость обмена до 1 Мбит/с при длине линии 60 м. Возможность применения гальванической развязки, причем гальваническая развязка может устанавливаться приемо–передающим буфером и микросхемой, обеспечивающей функции CAN, либо между микросхемой и остальной системой.
| Прикладной уровень | |
Объектный уровень
|
CAN |
Транспортный уровень
|
|
Физический уровень
|
|
В CAN протоколе определены следующие типы фреймов:
Удаленный фрейм аналогичен по структуре фрейму данных, но не имеет поля данных, а фрейм ошибок и фрейм перегрузки содержат по 2 поля: в первом располагаются флажки ошибок и служебная информация, а второе является полем разграничителя Delimiter, и содержит восемь рецессивных битов.
Передающий узел в CAN протоколе слышат ВСЕ другие узлы в сети и подтверждают это. Всякий раз, когда шина свободна от передачи, узел может начинать передавать. Если узел передает, эта передача должна быть завершена прежде, чем другой узел может пытаться передавать. Если два или больше узла начинают передавать в одно и то же время, конфликт решается при помощи неразрушающего (non-destructive) поразрядного алгоритма арбитража, использующего поле арбитража.
Поле арбитража, включенное во все фреймы данных, состоит из
11–битовое поле идентификатора передается от старшего к младшему значащему биту. Доминирующий уровень – логический 0. Одновременная передача бита с доминирующим уровнем (логический 0) и бита с рецессивным уровнем (логическая 1) дает в результате уровень логического 0.
В течение передачи поля арбитража каждый передатчик контролирует текущий уровень на шине и сравнивает это с битом, который он должен передавать. Если значения равны, узел способен затем продолжить передачу. Если бит с пассивным уровнем (логическая 1) был передан, а активный бит (логический 0) обнаружен на шине, то данный узел теряет право передачи и должен прекратить передачу последующих данных (рис. 8). Узел, который потерял шину, может сделать попытку передачи снова, когда текущая передача завершена. Важно следующее: идентификатор с самым низким значением выигрывает арбитраж. Из сказанного можно сделать следующие выводы.
Приоритетным является не передающий или приемный узел, а сообщение, имеющее меньшее значение идентификатора. Если в сети один из узлов(сервер) будет ответственным за принятие решений, то он должен иметь наименьший адрес из задействованных. Вторая возможность, которую дает механизм арбитража, использована в сети верхнего уровня DeviceNet. В этой сети количество узлов ограничено 64 и для адресации отведены младшие разряды идентификатора, а старшие разряды предназначены для кодирования видов сообщений. Естественно, что сообщение, имеющее 0 в старшем бите, захватит шину первым, независимо от адреса узла приемника. Это, в свою очередь, обеспечивает передачу сообщений первого вида, например об аварии, по сети первыми, независимо от адресов приемных и передающих узлов.
CAN – это протокол, ориентированный на использование в условиях помех. Различные сообщения, передающиеся по сети, имеют идентификатор, и каждая станция решает, основываясь на этом идентификаторе, получать или нет это сообщение. Этот идентификатор определен в поле идентификатора CAN фрейма.
При этом адрес приемника устанавливается в самом приемнике путем настройки входных фильтров соответствующих микросхем.
Входные фильтры представляют собой решета, или идентификационные экраны. Любое сообщение, которое проходит через входные фильтры, должно быть обработано процессором обслуживания CAN контроллера. Чем большее количество единиц может быть отфильтровано, тем меньше нагрузка на процессор.
Микросхемы, поддерживающие CAN протокол, могут иметь одиночный фильтр или многократные фильтры, в зависимости от конкретной реализации.
Существуют следующие два типа входных фильтров:
CAN протокол обеспечивает механизмы обнаружения следующих типов ошибок.
CAN микросхемы поддерживают стандартный или расширенный фрейм. Стандартный фрейм означает, что CAN микросхема поддерживает 11 битовое поле идентификатора. Расширенный фрейм означает, что микросхема поддерживает 29 битовое поле идентификатора. Новые САN микросхемы могут поддерживать форматы как стандартного фрейма, так и форматы расширенного фрейма.
В данной работе были рассмотрены одни из основных протоколов на базе которых можно строить промышленные сети управления. Необходимо заметить, что целью работы стояло не рассмотрение всех возможным протоколов, а только лишь тех которые предназначенны для построения небольших сетей управления.
Можно сделать вывод, что протокол RS232 уже практически не пригоден для непосредственного применения в сетях управления из–за низкой скорости, малой помехоустойчивости и сложностей которые возникают при построении сети в которая содержит несколько устройств. Но так как RS232 прост в применении и практически все персональные компьютеры имеют данный интерфейс, он часто находит используется в сетях мастер-подчиненный, соединяя компьютер и мастер устройство. Однако все более привлекательным в этой роли выступает протокол USB, вследствие постоянного понижения цены на микросхемы поддерживающие данный интерфейс и высокой скорости которую он обеспечивает.
Интерфейс RS485 занимает твердую позицию из–за своей дешевизны и простоты применения, а также высокой скорости которую он может обеспечить. Недостатком можно считать то, что данный интерфейс затрагивает лишь физический уровень сети и нисколько не определяет все вышестоящие уровни. Поэтому проектировщику приходится самому разрабатывать их. Также протоколом не определено как выявлять возможные ошибки которые могут возникнуть в сети.
Наиболее привлекательным выглядит протокол CAN из–за своей гибкости, надежности, высокой скорости, поддержки большого количество узлов. Недостатком его можно считать то, что в случае его применения, резко возрастает цена системы например по сравнению с RS485. Так для его использовании необходим не только CAN контролер (либо микроконтроллер которые поддерживает CAN) но и микросхема передатчика и приемника для взаимодействия в физической средой. Поэтому перед его использованием должен быть проведен тщательный экономический анализ целесообразности применения.
| ДонНТУ || Магистры ДонНТУ | Индивидульное задание Перечень ссылок Отчет о поиске Библиотека | RU EN UKR |