ИССЛЕДОВАНИЕ ЧЕТЫРЕХУРОВНЕВОЙ СТРУКТУРЫ УПРАВЛЯЮЩЕГО АВТОМАТА МИЛИ В
БАЗИСЕ СТАНДАРТНЫХ БИС
Е.В. Малюк
Донецкий национальный технический университет
Доклад был представлен на конференции "Комп'ютерний моніторинг та інформаційні технології" 2007 года, ДонНТУ.
Важнейшей частью любого цифрового устройства
является управляющий автомат. На практике УА часто реализуют в виде автомата с «жесткой»
логикой (автоматы Мили и Мура). Алгоритмы управления
операционным устройством, являющиеся исходными данными для синтеза схемы УА,
задаются, как правило, в виде граф-схем, которые отличаются большим количеством
характеристик. В последнее время все чаще для реализации схем управляющих
автоматов применяются различные программируемые логические интегральные схемы
(ПЛИС), которые обладают высокой стоимостью и сложностью. [1] В настоящее время
актуальной является задача разработки новых структур автоматов, которые
позволят уменьшить аппаратурные затраты в схеме.
В настоящее время широко применяются три класса
ПЛИС: простые ПЛИС (зарубежный термин SPLD - simple programmable logic device), комплексные ПЛИС (зарубежный термин CPLD - complex programmable logic device) и программируемые пользователем вентильные
матрицы (зарубежный термин FPGA - field programmable gate array).
В классе SPLD выделяют два подкласса: программируемые
логические матрицы (ПЛМ, зарубежный термин PLAs - programmable logic arrays) и программируемые матрицы логики (ПМЛ, зарубежный
термин PALs –
programmable array logics). SPLD состоят
из двух матриц: матрицы «И» и матрицы «ИЛИ». В ПЛМ обе матрицы программируемые,
а в ПМЛ – матрица «ИЛИ» фиксированная. CPLD состоят из блоков логических
вентилей, объединенных программируемой коммутационной матрицей. Современные
CPLD, как правило, являются электрически перепрограммируемыми и сохраняют
логическую структуру после отключения питания. FPGA состоят из большого числа
конфигурируемых логических блоков (зарубежный термин LUT) и трассировочных
ресурсов, обеспечивающих их межсоединения. Из современных ведущих разработчиков
микросхем CPLD и FPGA следует отметить фирмы Xilinx, Altera, Atmel, Lattice Semiconductor, Cypress
Semiconductor. [2]
Данная работа посвящена актуальной задаче исследованию
методов синтеза структур УА с «жесткой» логикой, которые ориентированы на
уменьшение стоимости логической схемы устройства и учитывают характерные
особенности реализуемого алгоритма управления и элементного базиса. В качестве
УА с «жесткой» логикой выбран автомат Мили, а в качестве структуры УА –
четырехуровневая структура MPFY-автомата, которая в наше
время не достаточно исследована.
Оптимизация схемы УА Мили может выполняться путем
уменьшения как числа входов, так и числа выходов, а также совместно. Такой
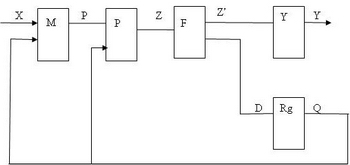
комплексный подход порождает многоуровневые структуры УА. В MPFY-автомате оптимизация выполняется путем замены входных переменных (MP), кодирования строк прямой структурной таблицы (таблицы переходов) (PF) и кодирования наборов микроопераций (FY).
В результате получается четырехуровневая структура УА. Структура управляющего MPFY-автомата показана на рисунке 1. M-подсхема реализуется на
мультиплексорах, P-подсхема – на ПЛИС (PAL и CPLD),
F-подсхема и Y-подсхема
– на элементах памяти PROM.
В рамках магистерской работы предполагается
разработать программное обеспечение, которое позволит синтезировать заданный
автомат в базисе стандартных БИС для реализации граф-схем различных
конфигураций. Данная САПР по результатам
своей работы должна формировать VHDL-код программы, с помощью которого возможно дальнейшее исследование заданной структуры
в среде Active-HDL. В качестве входных данных
для САПР выступает текстовый файл с основными характеристиками исследуемой
граф-схемы алгоритма. Структура разрабатываемого программного продукта
приведена на рисунке 2.
![]()
Рисунок 2 – Структура
разрабатываемой САПР
Также в рамках магистерской работы предполагается провести исследования и
сделать выводы о целесообразности применения заданной структуры УА для
различных граф-схем алгоритмов, выявить недостатки и достоинства MPFY-автомата в сравнении с другими структурами УА Мили (двухуровневая,
трехуровневая и т.д.).
Литература
1.
А.А.
Баркалов. Синтез устройств управления на программируемых логических
устройствах. – Донецк. 2002.
2.
В.В.
Соловьев. Проектирование цифровых систем на основе программируемых логических
интегральных схем. – Москва. 2001.