изображения в кластеры с
одинаковыми битовыми масками. Т.е. для каждого пикселя изображения
формируется маска взаимосвязей и рангов, затем пиксели с различными
масками разносятся в разные кластеры.
2. Этап одиночной связи. Для полученных на
предыдущем этапе кластеров
строится матрица близости (расстояний) между кластерами. В качестве
расстояния между кластерами используется среднее Евклидово расстояние
между всеми парами точек,
входящих в кластеры, расстояние между которыми рассчитывается. В
полученной матрице происходит
поиск наиболее "близких" кластеров (т.е. минимумов матрицы близости). Если расстояния
между несколькими парами
кластеров являются одинаковыми и минимальными, то, в первую очередь, в
качестве "близких" кластеров,
выбираются кластеры с минимальной площадью. Найденные "близкие" кластеры объединяются,
образуя новые кластеры, для
которых производится перерасчет центров. Из матрицы расстояний удаляются
строки и столбцы,
соответствующие объединенным кластерам, и добавляется строка и столбец,
соответствующие полученному
кластеру.
Стоит
отметить, что первоначально, поиск наиболее "близких" кластеров предлагается производить
для кластеров с
незначительной площадью (автор работы незначительными определяет кластеры, площадь которых меньше
0.001% площади анализируемого
изображения). Это позволяет минимизировать наличие эффектов "соли" и
"перца" на кластеризированных
изображениях.
Данный этап повторяется до тех
пор, пока количество кластеров не достигнет количества шестнадцати (данный
числовой параметр взят из работы [10] и проверен
экспериментально).
3. Этап окончания. Данный этап разработан как
критерий окончания кластеризации;
он аналогичен предыдущему этапу с некоторым ограничением. Объединение
кластеров с минимальным расстоянием матрицы близости производится
только при выполнении условия
"близости" масок; в противном
случае процесс кластеризации заканчивается. Обозначим маски кластеров, претендующих на
объединение - M1
и М2. Тогда основные стадии анализа выполнения условия "близости" масок
следующие:
расчет результирующей маски
объединения: Mr=M1&M2;
установка начального значения
количества эквивалентных бит: Kb=0;
анализ всех соответствующих триад
масок Mr, M1 и М2 в отдельности:
Если ((Mr & 7) && ! ((M1 & 2 ||
M2 & 2) &&
((M1 & 4 &&
M2 & 1) || (M2 & 4 && M1 & 1))))
То Kb=
Kb+1
переход к следующей триаде масок:
Mr= Mr>>3, M1= M:»3\iM2=M2»3;
возращение к анализу следующей
триады масок.
анализ полученного числа
эквивалентных битов: Если (Kb>=5)
То условие "близости"
масок выполняется; Иначе условие "близости" масок не выполняется.
Т.е. при анализе триад масок количество эквивалентных бит
инкрементируется, если конъюнкция масок кластеров содержит хотя бы одну
единицу (Mr & 7), причем пара триад рассматриваемых
масок не должна быть двух следующих
типов (! ((M1 &
2 || M2 & 2) && ((M1 & 4 &&
M2 & 1) || (M2 & 4 && M1
& 1)))): 1) (1 1 0) и (0 1 1); 2) (0 1 1) и (1 1 0).
На рис.2 приведены примеры
24-битных изображений, размером 384х256 пикселей, различной энтропии. На
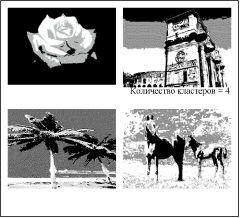
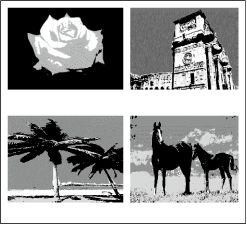
рис.3 предлагаются визуальные результаты выделения значимых областей
изображений с помощью авторского алгоритма, на рис. 4 - с помощью
модификации k-means алгоритма [10].
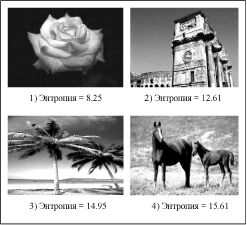
Рисунок 2: Примеры анализируемых
изображений.
Количество
кластеров =3 Количество кластеров =4
Количество
кластеров =4 Количество кластеров =4
Рисунок 3: Примеры
выделения регионов изображений с помощью предлагаемого иерархического
алгоритма.