Статья взята из журнала Chip-News 2004 №5. Автор - Бузыканов С.
Большая часть навигационных систем сегодня использует какой-либо тип магнитного датчика для определения своего положения относительно сторон света. Используя магнитное поле Земли, электронный компас, основанный на магниторезистивных датчиках, может определить азимут объекта с точностью до 0,1 °. В данной статье рассматривается задача построения компаса с точностью до 1 °, а также некоторые аспекты его применения.
Магнитный компас используется в навигации сотни лет. Изобретатель компаса неизвестен, однако существует упоминание о применении в Китае магнитного железа для определения сторон света ещё 2000 лет назад [1, 2]. В XII в. компас впервые применялся в Средиземноморье. Сегодня магнитная стрелка является лишь одной разновидностью компасов. Электронные компасы имеют массу преимуществ перед традиционными: вибро- и удароустойчивость, возможность введения автоматической компенсации при действии внешних полей, прямой интерфейс с электронной системой навигации. К сожалению, использование в России готовых электронных компасов связано с проблемой высокой стоимости данных устройств. Так, стоимость самого дешёвого компаса, имеющего возможность введения компенсаций различных мешающих факторов, более $1000. В данной статье рассматривается задача самостоятельной разработки недорогого компаса на основе магниторезистивно-го датчика фирмы Honeywell. Компас отличается простотой изготовления и настройки и обладает точностью ±1°.
Моделью магнитного поля Земли может являться диполь, как это показано на рис. 1. На рисунке видно, что магнитное поле направлено вниз в северном полушарии (угол падения около 70°), вверх — в южном и параллельно земной поверхности — на экваторе. Напряжённость магнитного поля Земли составляет примерно 0,5...0,6 Гс.

В любом случае магнитное поле Земли имеет компонент, параллельный земной поверхности и направленный строго на северный магнитный полюс. Данный компонент и используется для определения азимута.
Термин "магнитный северный полюс" подчёркивает, что географический полюс Земли отличается от магнитного на 11,5°. Географический магнитный полюс определяется осью вращения Земли и является исходной точкой меридиональных линий на карте. Различие в расположении магнитного и географического полюсов приводит к ошибке определения азимута до ±25°. Эта ошибка носит название угла склонения и может быть определена из специальных таблиц в зависимости от конкретного географического месторасположения.
Таким образом, задача нахождения азимута состоит из двух шагов:
1. определения горизонтальных компонент Х и У магнитного поля Земли (будем считать ось А" параллельной оси движения);
2. добавления угла склонения для определения истинного направления на север.
Существует много типов датчиков маг-нитнoгo поля: индуктивные, магнито-резистивные, магнитоиндукционные и т.д. Для большинства электронных компасов современных навигационных систем применяются индуктивные датчики, представляющие собой катушку индуктивности с сердечником, обеспечивающие чувствительность к магнитному полю с напряжённостью менее 1 мГс и обладающие низкой стоимостью. Однако, такие датчики весьма громоздки и хрупки, а также имеют большое время ответа — до 2...3 с. Эта задержка может быть неприемлемой при навигации быстро перемещающихся объектов.
Другим типом магнитных датчиков являются магниторезистивные датчики. Эти датчики изготавливаются в виде тонкой полосы пермаллоя, сопротивление которого зависит от внешнего магнитного поля. Магниторезистивные датчики имеют строго определённую ось чувствительности и производятся в виде интегральных микросхем. Чувствительность датчиков достигает 0,1 мГс, время ответа — менее 1 мкс. Таким образом, магниторезистивные датчики позволяют производить измерение поля с частотой более 1000 раз/с.
При навигации подвижных объектов возникает необходимость точного определения направления движения. Такую информацию можно получать с помощью системы GPS, которая принимает информацию со спутников и позволяет определять местонахождение объекта с точностью до 5 м. Однако такая система не всегда работает в городских условиях, при проходе различных тоннелей и т.д. В этом случае навигационная система должна ориентироваться на показания электронного компаса. Рассмотрим вариант недорогого и простого в изготовлении электронного компаса на базе магниторезистивного датчика НМС1002 фирмы Honeywell.
Для достижения точности в Г требуется датчик, позволяющий уловить изменение угла положения на 0,1°, имеющий низкий гистерезис (<0,05%) и высокую степень линейности (ошибка <0,5%). Магнитное поле по координатам X и Y обычно лежит в диапазоне 200...300 мГс — на экваторе больше, у полюса меньше. Используя соотношение для азимута
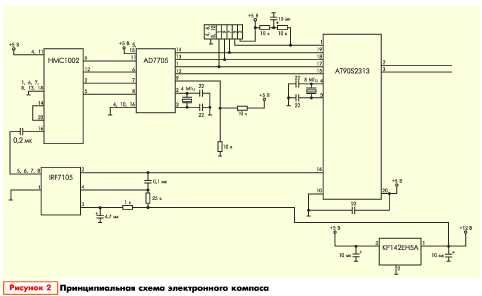
Для построения цифрового компаса предлагается использовать схему, приведённую на рис. 2. Основой компаса является двухканальный магниторезис-тивный датчик НМС1002, позволяющий измерять одновременно напряжённость магнитного поля по осям Х и Y. Сигнал с выхода подаётся на 16-бит АЦП AD7705, что позволяет достичь требуемого разрешения в 1°. Применение данной микросхемы за счёт возможности задания коэффициента усиления программным способом позволяет отказаться от дополнительного применения операционного усилителя для усиления дифференциального сигнала с выхода датчика (диапазон выходного напряжения датчика обычно составляет ±30 мВ), что повышает гибкость системы. Полученные значения поступают на микроконтроллер, имеющий порт для внутрисхемного программирования и производящий требуемые математические вычисления. Результат вычисления азимута по последовательному порту выводится непосредственно в систему навигации или на устройство отображения.
При воздействии на магниторезис-тивный датчик сильного внешнего магнитного поля может наблюдаться эффект остаточной намагниченности, что связано с внутренней структурой пермаллоя. Для предотвращения искажений в показаниях необходимо подать импульс set/reset [3], что обеспечивается с помощью
транзисторной сборки IRF7105. В нормальном состоянии управляющий вывод процессора находится в состоянии "лог. 1". Для подачи импульса set/ reset вывод кратковременно переводится в состояние "лог. О", а потом возвращается к "лог. 1". При автономной работе компаса данную процедуру целесообразно проводить каждые 20...30 с, что также позволит избавиться от температурного дрейфа датчика.
Перед вычислением азимута необходимо нормировать показания датчиков. Так как характеристики каналов внутри датчика не идентичны, требуется ввести поправочные коэффициенты:
мы можем определить требуемое значение. Для получения разрешения в 0,1 градус при напряжённости поля в 200 мГс необходимо, чтобы чувствительность датчика была не менее 0,35 мГс. Магниторе-зистивные датчики, выпускаемые сегодня, обеспечивают чувствительность 0,07 мГс, имея пятикратный запас.
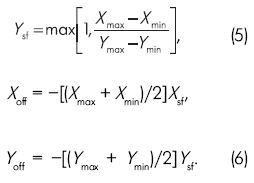
Для этого необходимо сделать полный оборот в горизонтальной плоскости и определить максимальные и минимальные показания датчиков по осям X и Y. Вычисления поправочных коэффициентов проводятся по формулам:
При вычислении азимута надо учитывать, что при Х = 0 возникает ситуация деления на нуль и целесообразно пользоваться следующими соотношениями:
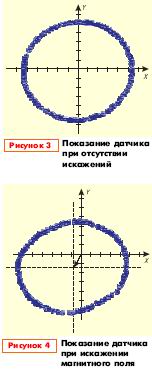
Приведённый выше алгоритм хорошо работает на открытой местности при отсутствии предметов, вносящих искажения в магнитное поле Земли.
ли и магнитного поля транспортного средства. Таким образом, для определения магнитного поля Земли необходимо заранее определить компенсацию дополнительного магнитного поля [4].
Рисунки 3 и 4 показывают искажения, вносимые дополнительным магнитным полем в показания датчиков. Как видно из рис. 3, показания датчика при его обороте на 360° образуют окружность с центром в начале координат. Магнитное поле транспортного средства превращает эту окружность в эллипс и смещает центр. Таким образом, для внесения компенсации необходимо определить два масштабирующих коэффициента Xsf и Ysf, преобразующих эллипс в окружность, и две корректирующие величины Xoff и Yoff , возвращающие центр окружности в точку начала координат. В этом случае величины X и V для расчёта азимута вычисляются по системе уравнений (4):
где Xd и Yd — показания соответствующих датчиков.
Приведённая схема при точной настройке обеспечивает точность вычисления азимута более ±1° и возможность введения компенсации внешних искажающих магнитных полей. При эксплуатации данного устройства следует учитывать, что точное определение азимута возможно только при его горизонтальном положении. Для обеспечения возможности работы компаса в наклонном положении необходимо ввести датчик по оси координат Z, а также дополнительный датчик крена и наклона. В этом случае устройство значительно усложняется и его цена существенно возрастает.
Литература