In telematics platforms, navigation data plays a vital role and permits new dynamic possibilities, writes Mark Amundson
WHETHER IT RELATES to land, sea or air transportation, telematics involves the flow of information, with navigation data a key part of that flow. s If we rely solely on latitude and longitude coordinates to determine position, simple applications, such as vehicle location and the query of nearby service or product information, can be accessed. By adding heading data into the latitude&longitude data created by Global Positioning System (GPS) receivers, the vehicle can now "pull" product and service information selectively, merely by reference to its direction of travel.
Electronic compasses make ideal heading sensors as a complement to navigation aids, such as GPS receivers, by sensing the direction of the earth's magnetic field. The classic argument against the use of a compass is that GPS provides heading information that is computed by the difference of two most recent position fixes (waypoints). This is all fine for constantly moving objects, but for vehicles that are stationary or slowly moving the heading computation becomes unreliable.
An electronic compass also becomes necessary if backup navigation means are needed when dealing with the GPS blocking caused by urban jungles and obstructions such as bridges and tunnels. If provided with heading, speed and time data, a reasonably accurate backup navigation method can be implemented. Pointing offers revenue-generating opportunities The telematics industry has been searching for its killer application, and the provision of accurate compass heading data is one of the key parts of finding that all-elusive return on investment. Early telematics service providers have been leading the way in promoting vehicle location services, but with a limited service menu. With the electronic compass, heading information is used much like a computer mouse or trackball to narrow choices.
In telematics, information can be "pushed" or "pulled", much like we use email and the internet today. Pull services are like legacy telematics services where the vehicle and/or operator extract data from a wireless link from the data provider. However, by using vehicle pointing, future telematics service providers will be able to provide direction-specific requests, such as en-route traffic avoidance, localised weather predictions and upcoming points of interest, plus direction-based yellow pages data mining. A classic example of this would be a request for information on pizza restaurants in the upcoming ten miles, with the vehicle occupants choosing a restaurant, and receiving directions, menu information and e-coupons.
Up to now this service has been paid for by the vehicle owner via a monthly subscription fee, but this is proving to have limited appeal. The real answer to
the vehicle owner will likely be free or multiple grades of service, with varying subscription fee plans. This is where "push" services enter telematics. Push services is a cute way of describing advertising that is pushed upon you.
It is very conceivable that even budget-conscious vehicle owners will have the same telematics vehicle interface as luxury vehicle owners, but with the display having full or partial advertising on it until the operator chooses to interact with it. The advertisers will likely be businesses, non-profit agencies and

The HMR3300 uses three magneto-resistive elements plus a two-axis MEMs accelerometer for pitch and roll inputs. departments of tourism, all willing to allocate marketing funds for "dashboard time".
As a subset of telematics, location-based services are considered the handheld platform version of vehicle telematics. These platforms are portable computers, PDAs and wireless phones enabled by navigation information.
In the United States of America, the impending Emergency 911 Act is driving the adoption of GPS receiver
electronics in devices with wireless voice/data capabilities. If an electronic compass is also incorporated, the ability to point the handheld device gives those providers an opportunity to provide revenue-generating location-based services. Much as with the model of push and pull information, location-based services permit the users of handheld devices to point to a business or point-of-interest and extract web-based content about it.
Taking the pizza restaurant example and translating it into a location-based services form, an urban pedestrian points to a restaurant, reads its daily menu, checks out a food-critic's review of the place, receives an e-coupon and makes a table reservation for later in the day. In this example, the revenue stream is the restaurant paying the wireless service provider for the "virtual yellow pages" listing for subscribers with location based services enabled on their wireless devices. Those monies help subsidise the GPS/Compass feature inclusion on the subscriber's handset as well as the information server infrastructure to hold the business content.
Selecting the right compass Electronic compasses have differing grades of performance, along with different technologies for measuring the earth's magnetic field. The grades divide in two major categories; two-axis, and three-axis tilt-compensated compassing. The major compass technologies for electronic compassing include magneto-resistive (MR), magneto-inductive (MI) and flux-gate.
To measure the earth's field for compassing, the traditional method was to hold a magnetised needle on a pivot so that the needle orients itself with the South-Pole to North-Pole direction of the earth's magnetic field. Complicating things a little are that the earth's magnetic field is only horizontal at the
equator and has a dip angle as latitude is increased. Another is the difference between the true geographic poles and the magnetic poles. This angular difference is called the "declination angle" and can be corrected with latitude&longitude data from the GPS receiver.
A two-axis electronic compass requires the user to hold the compass platform reasonably flat with respect to gravity. This is usually not a problem for vehicles, and is the compass of choice in cost sensitive handheld platforms. Compass accuracy may be affected by non-level or "tilted" orientation when taking a reading of heading. In the worst case, each degree of tilt can accrue two degrees of compass heading error.
Three-axis compasses provide tilt compensation to reduce tilt errors to manageable levels. By containing three magnetic sensors at orthogonal angles, both the horizontal and vertical components of the earth's magnetic field are collected, plus the pitch and roll angles of the handheld platform to create the tilt compensation inputs. These pitch and roll inputs are provided by fluidic tilt sensors, accelerometers or gyroscope sensors. Besides the heading accuracy improvement, the tilt sensing permits pointing upward/downward, map auto-scrolling and gaming application inputs.
Compass technologies can be further categorised as passive or active magnetic sensor types. Like hall-effect devices, magneto-resistive sensors are passive devices and are additionally sensitive enough for earth's field. The magneto-inductive and flux-gate technologies are active devices requiring one or more oscillators to drive windings of wire that sense the earth's field. All three devices are used in vehicle and aircraft applications. Handheld devices with wireless receivers tend to favour magneto-resistive sensors, since the
passive components minimally interfere with the transmission/ reception of radio frequencies or demodulation of the complex digital information.
The cost of integrating electronic compasses into handheld and vehicle platforms can range from a couple of dollars to several tens of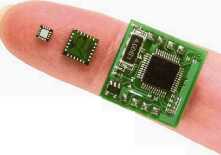
Compasses on
Finger - The HMR3100 to
the smaller HMC6352 to the
smallest HMC1052L.
Only the HMC1052L is the magneto-resistive sensor
elements in a 3mm by 3mm package,
but the HMC6352
and HMR3100 are complete
solutions including
microprocessors for
digital interfacing.
Mark Amundson is the applications engineer for magnetic sensors at Honeywell International's Solid State Electronics Center. Mark can be contacted at mark.amundson@honeywell.com. Further information on compass solutions for telematics can be found at www.magnetic-sensors.com.