9.1 RADIAL BASIS FUNCTION NETWORKS
Use of multilayer perceptron to solve nonlinear classification problem is very effective.
Nevertheless, a multilayer perceptron often has many layers of weights and a complex pattern of connectivity.
The interference and cross-coupling among the hidden units results in a highly nonlinear network training with
nearly flat regions in the error function which arises from near cancellations in the effects of different weights.
This can lead to very slow convergence of the training procedure. It therefore arouses people's interest to
explore other better way to overcome these deficiencies without losing its major features in approximating
arbitrary nonlinear functional mappings between multidimensional spaces. At the same time there appears a
new viewpoint in the interpretation of the function of pattern classification to view pattern classification as a
data interpolation problem in a hyperspace, where learning amounts to finding a hyperswfuce that will best fit
the training data. Cover (1965) stated in his theorem on the separability of patterns that a complex pattern
classification problem cast in high-dimensional space nonlinearly is more likely to be linearly separable than
in a low-dimensional space. From there it can then be inferred that once these patterns have been transformed into
their counterparts that can be linearly separable, the classification problem would be relatively easy to solve.
This motivates the method of radial basis functions (RBF), which could be substantially faster than the methods
used to train multilayer perceptron networks.
The method of radial basis functions originates from the technique in performing the exact interpolation of a set of
data points in a multidimensional space. In this radial basis function method, we are not computing a nonlinear function
of the scalar product of the input vector and a weight vector in the hidden unit. Instead, we determine the activation
of a hidden unit by the distance between the input vector and a prototype vector.
As mentioned, the RBF method is developed from the exact interpolation approach, but with modifications, to
provide a smooth interpolating function. The construction of a radial basis function network involves three
different layers, namely, an input layer, a hidden layer, and an output layer. The input layer is primarily made
up of source nodes (or sensory units) to hold the input data for processing. For an RBF in its basic form, there
is only one hidden layer. This hidden layer is of high enough dimensions. It provides a nonlinear transformation
from the input space. The output layer, which gives the network response to an activation pattern applied to
the input layer, provides a linear transformation from the hidden unit space to the output space. Figure 9.1
shows the transformations imposed on the input vector by each layer of the RBF network.
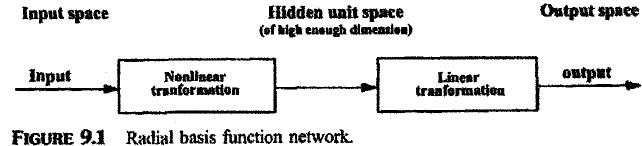
It can be noted
that a nonlinear mapping is used to transform a nonlinearly separable classifica¬tion problem into a linearly separable one.
As shown in Figure 9.1, the training procedure can then be split into two
stages. The first stage is a nonlinear transformation. In this stage a nonlinear
mapping function of high enough dimensions is to be found such that we
will have linear separability in the space. This is similar to what we discussed
on the machine in Chapter 3, where a non-linear quadratic discriminant
function is transformed into a linear function of fi(x), i = 1,..,M, representing, respectively, and
 are linearly independent, real- and single-value functions, which are independent of
Wj (weight). Note that in this case the discriminant function d(x) is linear with respective to wi but fi(x)
are not necessary assumed to be linear.
are linearly independent, real- and single-value functions, which are independent of
Wj (weight). Note that in this case the discriminant function d(x) is linear with respective to wi but fi(x)
are not necessary assumed to be linear.
Let us come back to the radial basis function problem. The basis functions used in this scheme are
all localized functions. The parameters governing the basis functions (corresponding to hidden units)
can be determined by using relatively fast, unsupervised methods. Some of these methods were discussed in
Chapter 6. In these methods, only the input data are used. The second stage of the RBF network (i.e., from
the hidden unit space to the output space) is a linear transformation that determines the weights for the final layer.
It is a linear problem and is therefore fast also.
As mentioned in the previous paragraph, a radial basis function network is a modification to the exact interpolation
approach, in which the number of basis functions is determined by the complexity of the mapping to be represented rather
than by the size of the data set. That is, the number of the basis functions is much less than that of the pattern data points
(M«N where M is the number of basis functions and N represents the number of pattern data points). With such an argument,
the centers of the basis functions will not be constrained to the input data vectors. Suitable centers will be determined during
the training process.
Let x be a d-dimensional input vector, t a target vector which is one-dimensional, N the number of input vectors xn, n= 1,2,...N,
and M the number of basis functions in the hidden unit. A set of basis functions can be chosen with the following general forms:
 . The argument of the function is the euclidean distance of the input vector x from a center ci. This justifies the name radial basis function.
. The argument of the function is the euclidean distance of the input vector x from a center ci. This justifies the name radial basis function.
9.4 COMPARISON OF RBF NETWORKS WITH MULTILAYER PERCEPTRONS
Both the radial basis function (RBF) networks and multilayer perceptrons (MLP) provide techniques for approximating nonlinear functional mappings between multidimensional spaces. However, the structures of these two networks are quite different from each other. Some of the important differences between the RBF and MLP networks are outlined below.
- An RBF network (in its most basic form) has one hidden layer, whereas a MLP may have one or more hidden layers and a complex pattern of connectivity. The interference and cross-coupling between the hidden units in a multilayer perceptron can lead to slow convergence of the training procedure.
- In multilayer perception networks, the activation responses of the nodes are of a global nature, and the output is the same for ail points on a hyperplane, whereas the activation responses of the nodes are of a local nature in die RBF networks in the sense that output of each RBF node f(.) is the same for all points having the same euclidean distance from the respective center cf and decreases exponentially with the distance.
- In a multilayer perceptron all parameters are usually determined at the same time as part of a single global training strategy involving supervised training, whereas an RBF network using exponentially decaying localized nonlinearities to construct local approximations to nonlinear mapping for the hidden layer achieves fast learning and makes the system less sensitive to the order of presentation of the training data.