Збірник наукових праць Донецького національного технічного університету. Серія: Електротехніка і енергетика, випуск 50: Донецьк: ДонНТУ. - 2002. - С.53-61.
УДК 621.316.925
For nodes of electrical systems with motors the common principle of construction of automatics is considered which carries out simultaneously functions of protection and diagnosing of elements of the node. The new principle of per-formance protection function is offered. Due to performance of protection centralized, it has sensitivity more above, than at existing protection. The protection works without time-lag at occurrence of damage in any point of the mode.
ВСТУП. ЗАГАЛЬНІ МІРКУВАННЯ
Останнім часом енергетика майже усіх країн з метою забезпечення надійності роботи електрообладнання найбільш активно розвивається у наступних напрямках:
- вдосконалення принципів і конструкції електрообладнання, та підвищення якості його виготовлення;
- запобігання виникнення пошкоджень шляхом підвищення якості експлуатації, у тому числі і за рахунок розвитку безперервної діагностики;
- скорочення часу визначення та ліквідації пошкоджень і коротких замикань (к.з.) при забезпеченні висо-кої надійності принципів побудови автоматики та їх реалізації.
Сучасний стан експлуатації електричних систем вимагає подальшого розвитку вторинних систем у на-прямку вдосконалення їх спроможності запобігати розвитку дефектів електрообладнання і виникненню пошко-джень. В першу чергу це відноситься до основних споживачів електричної енергії у більшості промислових процесів - вузлів електричних систем з двигунами (ВЕСД). А тому продовжує залишатись доцільною необхід-ність підвищення технічної досконалості одного з найбільш застосовуваного виду вторинних систем - релей-ного захисту (РЗ). При цьому необхідно забезпечити таку чутливість РЗ, завдяки якій можна визначати виник-нення дефектів та пошкоджень на їх початковій стадії розвитку. Крім цього, необхідно значно знизити час вим-кнення коротких замикань, для чого відмовитись від використання принципу забезпечення селективності дії як основних, так і резервних захистів за рахунок введення витримки часу. Таким чином необхідно віддавати пере-вагу вдосконаленню ближнього резервування.
Для ВЕСД головними критеріями при визначенні максимально-припустимого часу фіксації виникнення пошкодження є наступні:
- необхідність забезпечення сталої роботи непошкоджених двигунів і в цілому ВЕСД при таких трифаз-них коротких замиканнях поблизу секції шин, вимкнення яких приводить до відновлення напруги живлення;
- при к.з. в елементах ланцюга живлення (трансформатор, лінія та ін.) час визначення факту появи к.з. по-винен бути таким, щоб з урахуванням повного часу вимкнення к.з. і ввімкнення резервного живлення забезпе-чувалась синхронна динамічна сталість синхронних двигунів.
При цьому слід враховувати і такі випадки, коли навіть при рівному нулю часу визначення виникнення к.з. з-за низької швидкодії комутаційної апаратури не вдається забезпечити сталий режим роботи навантажен-ня. У цьому разі треба виконувати заміну вимикачів або їх приводів на більш швидкодіючі.
Принципи побудови екплуатуємих нині приладів РЗ, які засновані на детерміністських підставах, майже повністю вичерпали свої можливості. На це вказує, наприклад те, що все частіше виникають труднощі з забез-печенням коефіцієнтів чутливості, які потребують ПУЕ [ 1]. І ці вимоги не вдається виконати, не зважаючи на те, що в розрахунках як правило не враховується опір дуги та дійсне місце пошкодження. Як відомо, внутрішні к.з. в двигунах супроводжуються меншими струмами з боку живлення, ніж к.з. на виводах обмотки статора. Тому коефіцієнти чутливості, регламентовані ПУЕ, забезпечують надійну роботу РЗ при внутрішніх к.з. зви-чайно тільки тоді, коли вони переходять у к.з. на виводах двигуна.
Майже усі принципи побудови релейного захисту застосовують оцінку параметрів сталих аварійних ре-жимів, або перехідних аварійних режимів. При цьому принципи виявлення пошкоджень засновані на викорис-танні практично тільки локальної інформації, яка отримується від захищаємого елемента електричної системи. Це призводить до необхідності стежити за зміною параметрів режиму у часі. Таким чином неповнота інформа-ції частково компенсується контролем її зміни у часі.
Майже завжди надійність визначення режиму об'єкта електричної системи приладами автоматики засно-вується тільки на інформації від цього об'єкту. Пошкодження інформації у більшості випадків призводить до хибних дій РЗ, або відмови його в дії. У деяких відомих захистах згідно з їх принципом дії використовується інформація від кількох об'єктів електричної системи, наприклад у диференційному захисту збірних шин [2]. Але надмірної інформації в цьому захисті не використовується. Між тим збільшити кількість правильних дій РЗ можна за рахунок використання інформації від суміжних елементів електричного вузла.
Найбільш перспективним напрямком розвитку РЗ є його виконання як інтегрованої системи [3], а саме захисно-диагностуючої автоматики (ЗДА) [4] . Одним із шляхів для цього є значне підвищення чутливості РЗ до такого рівня, коли РЗ може визначати виникнення дефектів на ранній стадії і формувати в цьому разі сигнал. Для підвищення технічного рівня РЗ його треба виконувати централізованим з резервуванням на кожному еле-менті вузла електричної системи з автономним джерелом оперативного струму.
ЗАГАЛЬНИЙ АЛГОРИТМ ФУКЦІОНУВАННЯ ЗДА ВЕСД
Основні принципи побудови ЗДА визначаються її головним призначенням - запобігання пошкоджень, а якщо пошкодження все-таки виникає, то ЗДА повинна його локалізувати з мінімальними збитками.
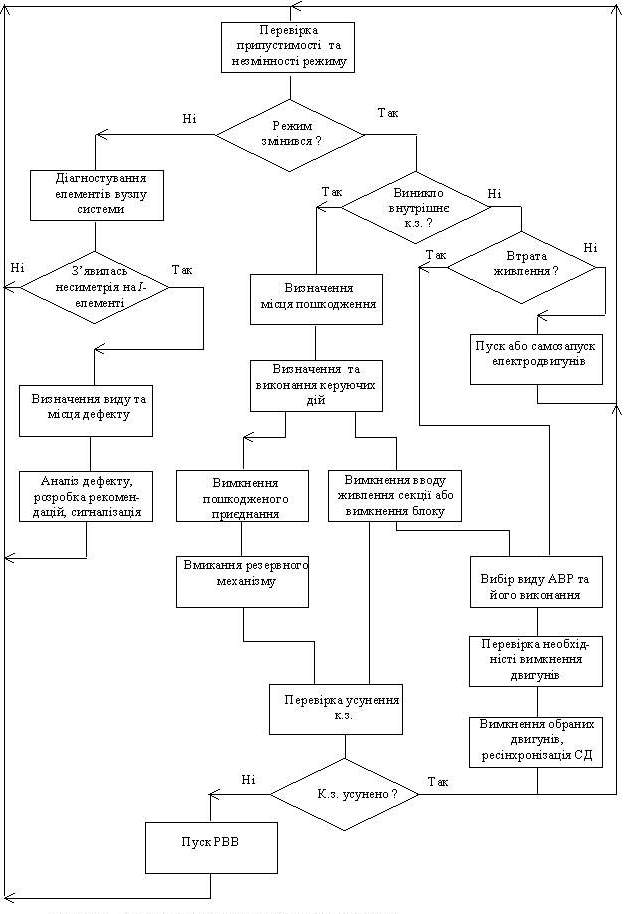
Стосовно до вузлів електричних систем з двигунами (ВЕСД) розроблено загальний алгоритм функціону-вання ЗДА, який наведено на рисунку 1.
У разі відсутності зміни режиму вузла електричної системи згідно з алгоритмом (рис.1) ЗДА безперервно виконує діагностування елементів вузлу системи. Цей режим засновується на визначенні появи несиметрії. Ви-явленню підлягають найбільш часто виникаючі дефекти [5,6], згідно з принципами, запропонованими у [5,6]. Поява зміни режиму призводить до виконання аналізу цієї зміни і пошуку необхідних керуючих дій. У разі ви-никнення пошкодження визначення його місця виконується за спеціальним алгоритмом і розглядається далі у цій статті.
Рисунок 1 - Загальний алгоритм функціонування ЗДА ВЕСД
У разі втрати живлення від робочого джерела виконується вибір виду автоматичного ввімкнення резерву (АВР) [7]. Тут головним є необхідність забезпечення щонайменших величин струмів та динамічних моментів у двигунах у процесі ввімкнення резервного живлення. Для цього виконується контроль величини напруги на двигунах (секції) і кута між векторами напруги на двигунах та напруги резервного джерела живлення. Вико-нання операції АВР може потребувати вимкнення двигунів, які не припускають несинхронного ввімкнення, або вимкнення невідповідальних двигунів з метою покращення умов самозапуска відповідальних двигунів. Режим самозапуска є небажаним режимом і виконується тільки у разі неможливості його уникнення з-за значного часу дії наявних у споживача вимикачів резервного живлення.
Найменший час дії резервування відмови вимикачів (РВВ) визначається майже тільки часом дії наявних у споживача вимикачів.
Розробка загального алгоритму виконана з урахуванням [4], а також деяких положень, які використані у централізованих захистах [8-10]. При цьому виникла необхідність додатково вирішити наступні питання:
- розробка принципу визначення к.з. у складних мережах, до яких відносяться ВЕСД;
- автоматичне урахування зміни конфігурації вузла (ввімкнення і вимикання приєднань, перемикання на друге джерело живлення та ін.);
- розробка принципів визначення одночасно усіх можливих видів пошкоджень;
- визначення параметрів спрацьовування та розпізнавання режимів пуску і самозапуску електродвигунів.
Визначення зміни режиму виконується декількома способами. У першому, подібно тому як це викону-ється у цифрових регістраторах [ 11], розраховуються мінімальне і максимальне значення сигналу за 20 мС, а також період і відносна фаза сигналу. Зміна одного, або декількох із цих параметрів сигналу вважається фактом зміни режиму. В цьому способі контролюємими сигналами можуть бути не тільки фазні напруги та струми, а й розраховані значення нульової, прямої та зворотної послідовностей. Тому у другому способі контролюється зростання складових нульової і зворотної послідовностей, та зниження прямої послідовності.
В ЗДА визначення точки виникнення к.з. засноване на використанні принципу централізованого захисту електроустановки від к.з., розробленої у 30-ті роки XX-го сторіччя відносно до захисту шин [8]. На відміну від цього захисту шин в ЗДА не використовуються окремі прилади контролю направлення потужності других за-хистів, а визначення направлення потужності к.з. (струмів к.з.) у всіх елементах мережі виконується безпосере-дньо автоматикою ЗДА.
На рисунку 2 наведено фрагмент схеми вузла електричної системи з двигунами, на прикладі якого нижче розглядаються основні принципи виявлення пошкоджень.
Оскільки мережі 6-10 кВ працюють з ізольованою нейтралью, тому в вузлах з електродвигунами можуть виникати тільки міжфазні короткі замикання. Замикання на землю в одній точці також виявляє ЗДА ВЕСД, але при цьому немає потреби у миттєвому вимкненню.
Пошкодження (к.з.), як правило виникає у нормальних режимах роботи вузла. Згідно з загальним алгори-тмом функціонування ЗДА ВЕСД у цих режимах проводиться безперервне діагностування. Але треба врахову-вати, що особливості робочих режимів впливають не тільки на процес діагностування, а й на процес визначення виникнення пошкоджень. Наприклад для вузлів власних потреб (в.п.) енергетичних блоків генератор-трансформатор можливі наступні робочі режими.
1.Сталий робочий режим блоку. Живлення секцій 6 кВ в.п. здійснюється від робочого трансформатору вла-сних потреб.
2.При наявності в схемі блоку вимикача між генератором і блочним трансформатором робочий трансфор-матор в.п. Т (рис.2) може знаходитись під напругою, але не нести навантаження (Q вимкнуто). Живлення секції 6 кВ в.п. при цьому здійснюється від резервного трансформатору в.п.
3.Робочий режим як у п.2, але навантаження на секції 6 кВ відсутнє (початок пуску блоку).
4.В режимах по п.п. 1 та 2 можливі особливості. У залежності від стадії режиму пуску блоку, або других причин, деякі двигуни не ввімкнені і не працюють.
Розглянуті режими також характерні для двохтрансформаторних вузлів з двигунами промислових підприємств.
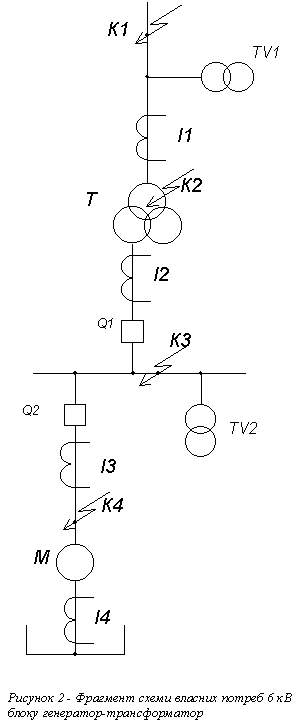
Розглянемо найбільш вірогідні місця виникнення пошкоджень у схемі на рис.2 і необхідні дії ЗДА при цьому. Оскільки більш складні дії ЗДА потребуються у вузлі в.п. блоку, тому аналіз проведемо стосовно цього вузла.
Точка к.з. К1 для ЗДА вузлу в.п. розглядається як зовнішнє к.з., а тому при цьому від ЗДА не потребуються ніякі дії. Але при цьому необхідно запобігти хибного спрацювання (забезпечити неспрацьовування) ЗДА.
Точка к.з.К2 - к.з. у робочому трансформаторі в.п. При цьому к.з. ЗДА повинна вимкнути трансформатор в.п. шляхом вимикання блочного вимикача на високій напрузі, а тому забезпечити зупинку усього блоку. Для безаварійної зупинки блоку ЗДА шляхом виконання автоматичного ввімкнення резервного живлення за-безпечує роботу відповідальних механізмів в.п.
У разі виникнення к.з. у точці К3 (на секції 6 кВ в.п.), ЗДА повинна вимкнути вимикач Q і заборонити АВР секції 6 кВ. Крім цього ЗДА повинна простежити за надійним вимиканням вимикача Q. У разі відмови цього вимикача ЗДА виконує дії по зупинці блоку.
Точка к.з. К4 - це к.з. у любій точці приєднання: в кабелі або двигуні, чи трансформаторі 6/0,4 кВ. ЗДА вимикає вимикач пошкодженого приєднання.
Таким чином ЗДА виконує захист від к.з. у всіх точках вузла, резервування відмови вимикачів, та керування режимами живлення двигунів, а також у разі необхідності ініціює зупинку блоку.
РОЗПІЗНАВАННЯ РЕЖИМІВ
Усі можливі режими роботи вузла можна з боку енергосистеми розділити на допустимі і недопустимі. До допустимих відносяться такі режими, при яких вузол може працювати необмежено довго без порушень технологічного процесу, в якому використовуються двигуни та інше електрообладнання цього вузла. До цих режимів відносяться і такі режими, коли в елементах електричної частини виникають дефекти, які не становлять безпосередньої загрози. До недопустимих режимів відносяться такі режими, коли в елементах електричного вузла виникають пошкодження і у першу чергу короткі замикання. При цьому допустимі режими розділяються на режими при наявності дефектів в елементах вузла і режими без дефектів.
З метою опису можливих режимів у m - мірному простору спостережень Rm [12] може бути використана слідуюча первинна інформація: фазні струми IA , IB , IC та міжфазні напруги UAB ,UBC ,UCA , а також напруги фаз по відношенню до землі. Для цих параметрів безперервно виконуються виміри їх миттєвих значень з періодом, значно меншим, ніж період частоти напруги мережі. Таким чином перетворюється аналогова інформація у цифрову. Такі виміри дозволяють розраховувати різні параметри режиму, такі як потужність, симетричні складові струмів і напруг та інші [13].
Основні операції по розпізнаванню режимів, визначенню виникнення пошкодження, та встановленню його місця відображені на рисунку 3
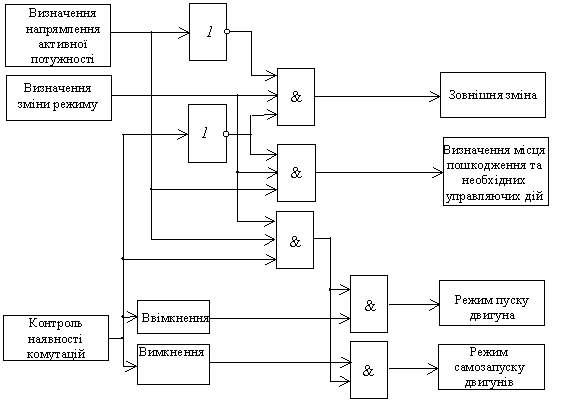
Рисунок 3 - Алгоритм розпізнавання режимів
Призначення захисту ЗДА полягає у визначенні появи пошкодження і необхідних при цьому дій по його усуненню. Задача визначення появи пошкодження розділяється на визначення появи пошкодження у зоні захисту і пошук місця пошкодження.
Традиційний спосіб відрізнення режиму пошкодження від нормальних режимів за рахунок установлен-ня значної величини параметру спрацювання [8] має низьку чутливість. Тому такий спосіб не придатний до використання у ЗДА.
Зміна величини струму вводу живлення на секцію, яка виникла з-за зміни режиму технологічного проце-су, не супроводжується зміною напрямлення активної потужності ні в одному з елементів електричного вузла. Тому, якщо внаслідок контролю напрямлення потужності не виявлено елементів, у яких виникла зміна напрям-лення, то робиться висновок про відсутність електричних пошкоджень. Окремим випадком є такий режим ро-боти ВЕСД, коли всі двигуни вимкнені, а тому при виникненні к.з. не буде відбуватись зміна напряму активної потужності. Складається враження, що у цьому випадку обраний параметр не дозволяє відрізнити зміну величини струму викликану технологічними змінами від зміни струму з-за електричних причин. Однак треба мати на увазі, що при відсутності ввімкнених електродвигунів не можуть відбуватись зміни величини струму вводу живлення, пов'язані із зміною технологічного режиму.
Таким чином, на підставі контролю зміни величини активного струму та направлення активної потужнос-ті по всіх елементах ВЕСД виконується однозначне визначення причини цієї зміни: технологічна чи електрич-на.
Враховуючи необхідність забезпечення малого часу спрацьовування в ЗДА використовується розпізна-вання зміни режимів (рисунок 3), засноване на порівнянні змодельованих величин (іМОД), які змінюються за синусоїдальним законом, з дійсними струмами захищаємої мережі [14].
Спрацьовування відбувається у разі
де Dі та DiМОД прирости дійсного та змодельованого струмів; kЗАП - коефіцієнт запасу, враховуючий можливі коливання струму у робочому режимі. Суттєвим є те, що моделювання струму виконується на підставі періодичних вимірів дійсного струму.
Зміна режиму також достатньо надійно визначається за алгоритмом виділення аварійних складових елек-тричних величин [8]. При цьому аварійна складова знаходиться по поточним значенням та значенням, які були запам'ятовані безпосередньо перед пошкодженням. Якщо у періодично повторюючихся миттєвих електричних величин на проміжку nT/2 не було зміни амплітуди або фази, то аварійна складова відсутня. Аварійна складова виникає внаслідок незбіжності миттєвих величин, які розділені інтервалом nT/2. Зміна навантаження також приводить до незбіжності величин. Тому такий критерій використовується сумісно з іншим, наприклад з конт-ролем напрямлення активної потужності.
ВИЗНАЧЕННЯ МІСЦЯ ПОШКОДЖЕННЯ
У централізованому захисті, яким є автоматика ЗДА, технічна досконалість забезпечується за рахунок того, що використовується новий для РЗ параметр - наявність комутацій вимикачів у ВЕСД у поточний момент часу. При відсутності таких комутацій цей параметр SQ=0. Окреме використання подібного параметру розглядається у чутливому резервному захисті [15]. Зміна величини активного струму при відсутності комутацій та зміни направлення активної потужності вказує на те, що зміни величини струму викликані зміною технологічного режиму і не потребують ніяких дій ЗДА. В цьому випадку стає можливим визначення перевантаження електродвигуна, якщо зміна величини струму виникає на вводі живлення (робочому або резервному) та на од-ному з приєднань електродвигунів. При цьому додатково встановлюється факт, що величина струму електро-двигуна перебільшила величину його номінального струму.
Схема вузла електричної системи з двигунами представляється матрицею сполучень, у якій відобража-ються давачі інформації, комутаційні апарати та зв'язки між ними. Захищаємі об'єкти у цій схемі вказувати не обов'язково, оскільки можливі дії по ліквідації пошкоджень майже повністю визначаються місцем встановлен-ня комутаційних апаратів.
Головні параметри, які використовує ЗДА ВЕСД при визначенні режиму та місця пошкодження є наступ-ні матриці:
- М' - матриця з'єднань, формується на підставі електричної схеми вузла з урахуванням ввімкненого ста-ну усіх наявних елементів ВЕСД. Формується автоматично шляхом виключення вимкнутих елементів ВЕСД, які встановлюються на підставі опитування давачів стану вимикачів;
- Q - матриця комутацій, яка формується на підставі матриці з'єднань М. Зміст цієї матриці постійно оновлюється шляхом автоматичного опитування стану вимикачів;
- sign P - матриця напрямів активної потужності, яка автоматично складається з результатів визначення напряму активної потужності на усіх ввімкнених на дану мить часу і постійно оновлюється на кожному крокі роботи ЗДА.
Якщо комутації за визначений час відсутні, то сума усіх елементів матриці Q дорівнюється одиниці.
У матриці sign P напряму активної потужності від джерела живлення у бік навантаження відповідає оди-ниця, а протилежному напряму - мінус одиниця.
Структура усіх матриць визначається повною матрицею з'єднань М, яка складається для режиму коли ввімкнені усі елементи вузла. Максимальна кількість рядків такої матриці визначається кількістю послідовно ввімкнених вимикачів і у більшості випадків дорівнюється 3. При цьому вимикач резервного живлення або сек-ційний вимикач враховуються у тому рядку, де і вимикач робочого живлення. При наявності трансформаторів струму у нульових виводах двигунів, а також трансформатори струму на кінці лінії, яка живить розподільчий пункт, вони враховуються у четвертому рядку матриці з'єднань. Максимальна кількість стовпців матриці М визначається кількістю приєднань n, які живляться від секції збірних шин.
ЦИФРОВЕ ВИЗНАЧЕННЯ НАПРЯМУ АКТИВНОЇ ПОТУЖНОСТІ
Визначення напряму активної потужності використовується в ЗДА для знаходження місця пошкодження, а тому повинно виконуватись якомога швидше. При цьому враховується наявність перехідного процесу у поча-ткову мить виникнення короткого замикання, наявність у складі струму к.з. аперіодичної складової. Крім того, значно ускладнює визначення напряму потужності відсутність вимірювальних трансформаторів напруги на деяких ступінях контролюємого вузла електричної системи.
Оскільки к.з. може бути як у межах ВЕСД, так і зовнішнім, для правильного налагодження ЗДА виконано аналіз усіх цих можливих пошкоджень.
Важливою особливістю ВЕСД є те, що майже у всіх випадках виникнення пошкоджень електродвигуни живлять місце виникнення к.з. на протязі часу, який значно перевищує необхідний час спрацьовування ЗДА. Тому ВЕСД у багатьох випадках виникнення пошкоджень може розглядатись як мережа з двостороннім жив-ленням. Для таких мереж одним з ефективних способів визначення місця пошкодження є струмовий напрямле-ний захист. Крім цього, навіть з урахуванням наявності режиму самозапуску електродвигунів досить ефектив-ним може бути застосування дистанційного захисту.
В ЗДА для визначення місця пошкодження використовується удосконалений принцип максимально-струмового напрямленого захисту. Визначення напряму активної потужності засновується на знаходженні зна-ку активної потужності, яка у загальному виді розраховується як [16]
де Т - період синусоїдальної напруги мережі; t - час; u(t) i i(t) - миттєві значення відповідно напруги та струму. Інтегрування на відрізку, кратному півперіоду, дозволяє позбавитись перемінної складової [16].Оскільки для визначення напряму активної потужності її точна величина не потребується, то для інтегрування використову-ється формула прямокутників, яка дає невелику точність. При цьому частота визначення напряму повинна бути кратною 100 Гц, або виконуватись через 10 мС. Тоді маємо[16]
де N - кількість вимірів миттєвих значень струму і напруги на півперіоду; k - номер виміру. Алгоритм цифрового визначення напряму активної потужності з високим рівнем захисту від завад засновується на визначенні знаку суми миттєвих значень активної потужності р20 на протязі 20 мС. Наступне значення р20 визначається шляхом його оновлення завдяки відніманню першого миттєвого значення р і додавання нового поточного значення р. На рис. 4 наведено приклади визначення знаку активної потужності р20 .
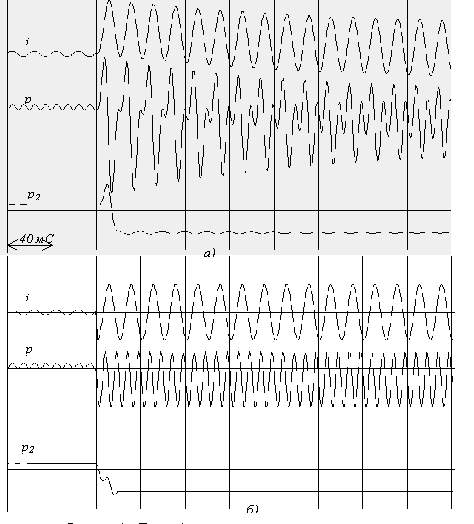
Рисунок 4 - Приклади визначення знаку активної потужності при наяв-ності у струмі к.з. аперіодичної складової (а) та при її відсутності (б).
Розрахунки виконані на підставі аналого-цифрового перетворення змодельованого струму к.з. з часом дискретизації 1 мС. Аналіз результатів показує , що аперіодична складова у струмі к.з. , яка звичайно обумов-лює труднощі при визначенні фази струму, у даному алгоритмі майже не впливає на результат визначення зна-ку активної потужності.
Напрям потужності контролюється по двом фазам, у зв'язку з тим, що при двофазних к.з. за трансформа-тором з непарною групою з'єднання один із напрямів може бути визначено неправильно [17].
Матриця напрямів активної потужності sign P в ЗДА формується на підставі результатів поелементного множення матриць струмів I та матриць напруг U. Матриця напруг U формується з урахуванням наявних вимі-рювальних трансформаторів напруг та ступенів трансформації. Оскільки направлення активної потужності в елементах ВЕСД визначається шляхом поелементного множення відповідних елементів матриць U та I , матри-ця напруг повинна мати такий же розмір як і матриця струмів.
Для реалізації наведених принципів автоматики потребується подальше вирішення питань забезпечення надійного визначення напряму активної потужності, а також роботи захисту при виникненні близьких к.з. та змінному навантаженні двигунів. Крім того потребується уточнення методики визначення параметрів спрацю-вання захисту.
ВИСНОВКИ
1.Розроблені теоретичні основи побудови централізованого захисту автоматики вузлів електричних сис-тем з двигунами, які полягають в удосконаленні методів розпізнавання режимів роботи електрообладнання та визначення місця виникнення к.з. Для реалізації автоматики передбачається використання промислових ком-п'ютерів.
2.Завдяки застосуванню удосконаленого
централізованого захисту в межах вузла з двигунами досягнуто якісне зростання
технічного рівня захисту. Підвищення рівня досягається завдяки забезпеченню
майже при всіх к.з. миттєвої дії захисту незалежно від місця виникнення
пошкодження та значному підвищенню чутливо-сті за рахунок того, що струм
спрацьовування визначається без врахування струмів пуску та
самозапуску.
Централізація захисту полягає у тому, що
автоматика визначає появу к.з. у межах усього вузла електрич-ної системи з
двигунами (трансформатор або лінія живлення, збірні шини та усі відходящі
приєднання) і вико-ристовує для цього інформацію з усіх елементів
вузла.
Визначення виникнення к.з. виконується на
підставі результатів контролю зміни величини активного струму та направлення
активної потужності. Якщо встановлено, що зросла величина струму і хоч у одного
з елементів змінився напрям активної потужності, та що до цього часу не було
комутацій вимикачів, вважається що виникло к.з. При відсутності ввімкнених
двигунів та приєднань виникнення к.з. можливо тільки в елементі живлення, або на
збірних шинах, а тому визначається без встановлення факту зміни напряму активної
потужно-сті по зростанню струмів і їх наявності у відповідному елементі.
3. Визначення внутрішнього (у межах
ВЕСД) к.з. виконується шляхом перевірки знаків активної потуж-ності по рядах
матриці напрямів активної потужності і зрівняння знаків у суміжних рядах.
Відсутність негатив-них напрямів свідчить про наявність нормального режиму.
Поява негативних напрямів розглядається як свідоц-тво виникнення
к.з.
Місце к.з. визначається на підставі порівняння
знаків активної потужності по рядках і стовпцях матриці напрямів.
4. Алгоритм цифрового визначення напряму активної потужності з високим рівнем захисту від завад за-сновується на визначенні знаку суми миттєвих значень активної потужності на протязі періоду промислової частоти. Наступне значення суми визначається шляхом його оновлення завдяки відніманню першого миттєво-го значення потужності і додавання її нового поточного значення.
5. Використання запропонованого нового для РЗ параметра - наявність комутацій вимикачів у ВЕСД у поточний момент часу з урахуванням додаткової інформації дозволило заборонити дію захисту при пусках і самозапусках електродвигунів. Величина струму спрацьовування при цьому наближується до номінального і навіть може бути менше його.
ЛІТЕРАТУРА
1. Правила устройства електроустановок . М.- Энергоатомиздат.- 1986.- 648 с.
2. Чернобровов Н.В. Релейная защита. М.- Энергия. - 1971.- 624 с.
3. Гребченко Н.В. Интеграция функций цифровой релейной защиты и средств диагностирования электро-оборудования// Збірник наукових праць Донецького державного технічного університету. Серія: Елек-тротехніка і енергетика, випуск 21: Донецьк: ДонДТУ. - 2000. - С.21-24.
4. Гребченко Н.В., Сивокобыленко В.Ф., Кулеба В.В., Егоров А.В. Система защитно-диагностирующей автоматики узла двигательной нагрузки как нижний уровень информационно-управляющей системы подстанций и ТЭС// Энергетика и электрификация. - № 5. - 2001. - С.39 - 44.
5. Гребченко Н.В., Сивокобыленко В.Ф. Диагностика электродвигателей собственных нужд электростан-ций в стационарных режимах // Технічна електродинаміка. Тематичний випуск. Проблеми сучасної електротехніки. Частина 5. Київ. - 2000. - С.96-99.
6. Гребченко Н.В. Исследование зависимости параметров рабочего режима присоединения 6-10 кВ от наличия дефектов в электрической изоляции // Збірник наукових праць Донецького державного техніч-ного університету. Серія: Електротехніка і енергетика, випуск 28: Донецьк: ДонНТУ. - 2001. - С. 136-142.
7. Гребченко Н.В. Нури А. О применении быстродействующего АВР двигательной нагрузки // Электри-чество. - 1997. - № 7. - С.15-19.
8. Федосеев А.М. Релейная защита электроэнергетических систем. Релейная защита сетей. М.- Энерго-атомиздат.- 1984.- 520 с.
9. Логический анализ и синтез релейных защит с n входными величинами / В.Е. Поляков, А.А.Троценко, В.П.Федотов, Ю.К.Шарнин // Изв.ВУЗ. Серия Энергетика.- 1971.- № 8.- С.24-29.
10. Поляков В.Е., Федотов В.П., Шарнин Ю.К. Централизованная максимально токовая защита распреде-лительных сетей 6-35 кВ // Изв. ВУЗ. Серия Энергетика.- 1971.- № 7.- С.13-17.
11. Пуляев В.И., Усачев Ю.В. Цифровая регистрация аварийных событий в энергосистемах .- М.- НТФ "Энергопрогресс".- 1999.- 72 с.
12. Богатирев Л.Л., Стихин Г.П. Использование методов теории распознавания образов для управления режимами сложных энергетических систем // Электричество .- 1975 .- № 12 .- С. 6-11.
13. Шнеерсон Э.М. Дистанционные защиты. - М.: Энергоатомиздат, 1986. - 448 с.
14. Микропроцессорные гибкие системы релейной защиты.// В.В.Михайлов, Е.В.Кириевский, Е.М.Ульяницкий и др.; Под ред. В.П.Морозкина.- М.: Энергоатомиздат.- 1988.-240 с.
15. Зильберман В.А. Дальнее резервирование в сети собственных нужд блочных электростанций // Элек-трические станции .- 1988 .- № 9 .- С.76-82.
16. Теоретические основы построения микропроцессорных систем в электроэнергетике // Стогний Б.С., Кириленко А.В., Проске Д. и др. ; Под ред. Стогния Б.С., Кириленко А.В., Проске Д..- АН Украины. Ин-т электродинамики.- Киев: Наук. думка.-1992.-320 с.
17. Слодарж М.И. Режимы работы, релейная защита и автоматика синхронных электродвигателей.- М.- Энергия.-1977.-216.- с.