 |
Дорофеев Виктор АлександровичЭЛЕКТРОТЕХНИЧЕСКИЙ ФАКУЛЬТЕТСпециальность: Электромеханические системы автоматизации и электроприводТема выпускной работы: "Синтез аппаратуры диагностики управляемых выпрямителей"Руководитель: доцент, к.т.н. Шумяцкий В.М. |
АВТОРЕФЕРЕРАТ |
ВВЕДЕНИЕОсуществление требуемого уровня надежности можно достичь в основном двумя способами: повышением схемотехнического и конструктивного совершенствования самой системы управления или совершенствованием технического обслуживания и ремонта посредством использования аппаратуры диагностики.Эффективное целевое использование современных систем управления, поддержание их в процессе эксплуатации в исправном, работоспособном состоянии, практически невозможно без непрерывного или периодического контроля за их техническим состоянием. Обнаружение и устранение неисправностей элементов функционально связанных узлов сложной системы управления (СУ) оказываются трудоемкими и должны осуществляться квалифицированным персоналом. Оснащение сложных СУ средствами диагностики позволит сократить время локализации и устранения неисправностей и тем самым улучшить показатели восстанавливаемости объектов контроля. Приспособляемость объектов контроля к диагностированию должна обеспечиваться еще на стадии проектирования. Это позволит, при возникновении проблемы сэкономить как затраты на материалы, так и человеческие ресурсы. АКТУАЛЬНОСТЬ ТЕМЫАктуальным вопросом в деле повышения производительности различного рода промышленных механизмов является совершенствование систем управления электроприводами. Благодаря развитию микропроцессорной техники создаются и внедряются качественно новые системы управления, которые позволяют решать полностью или частично вопросы автоматизации отдельных операций технологического цикла (управление главным приводом стана, регулирование скорости подъема и опускания кабины лифта, разгон вентилятора главного проветривания шахты).Основным источником питающего напряжения двигателя постоянного тока является тиристорный преобразователь. Поскольку он содержит значительное количество функциональных узлов, выполняющих сложные преобразования сигналов, то уровень надежности будет зависеть от показателей надежности этих узлов. Следовательно, разработка аппаратуры диагностики, для повышения надежности ТП, является актуальной проблемой. ПЕРЕЧЕНЬ РЕШАЕМЫХ В РАБОТЕ ЗАДАЧВ работе ставятся следующие задачи по разработке и исследованию устройства диагностики узла ввода работающей группы реверсивного тиристорного преобразователя (логически-переключающее устройство):1. Используя реальную диаграмму работы двигателя постоянного тока в режиме реверса необходимо составить принцип работы логически-переключающего устройства (ЛПУ). 2. На основании этого принципа разработать математическую модель ЛПУ. 3. На основании функциональной схемы системы ТП-Д разработать ее математическую модель среде SIMULINK пакета MATLAB. 4. Использую математическую модель системы ТП-Д промоделировать работу привода в режиме прямого пуска и реверса. Получить осциллограммы работы привода. 5. Сравнить полученные результаты с реальными данными. ОСНОВНАЯ ЧАСТЬ ТЕОРЕТИЧЕСКИЙ АНАЛИЗ
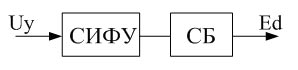
Коэффициент полезного действия тиристорного выпрямителя определяется прямым падением напряжения на нем, которое для одного тиристора представляет всего 1-1,2 В, поэтому общий ККД выпрямителя при номинальной нагрузке для мощности 50-100 квт составляет 0,-0,92. С увеличением мощности ККД оказывается еще высшим. В системе ТП-Д возможно регулирование угловой скорости двигателя вверх от основной влиянием на поток двигателя и регулирование вниз изменением угла включения тиристоров при неизменном магнитном потоке двигателя. Система импульсно-фазового управления (СИФУ) Система импульсно–фазового управления обеспечивает преобразование непрерывного входного сигнала Uу в последовательность управляющих импульсов силовых тиристоров. При этом фазовый сдвиг импульсов относительно точки естественной коммутации определяется величиной и значением напряжения Uу (рисунок 2).
Однако, как видно из рисунка 4, в схеме управления появляться новое устройство – логически-переключающее устройство (ЛПУ).
Оно выполняет следующие функции: 1. выбор группы для работы в зависимости от знака управляющего напряжения - разности напряжения, которое задается, и напряжения обратной связи; 2. запрет открывания неработающей группы при наличии тока в работающей группе; 3. запрет снятия открывающих импульсов из работающей группы при протекании по ней тока; 4. обеспечение временной паузы перед включением группы, которая вступает в работу. Для диагностики узла ЛПУ была использована реальная диаграмма работы двигателя постоянного тока в режиме реверса (рисунок 5)
Эта зависимость может быть записана как в1 (t + 1) =f[i, ΔU, в1t ] в2 (t + 1) =f[i, ΔU, в2t ] в1,в2 – сигналы на управление блокирования первой и второй вентильными группами, принимают значение “0” и “1”. “0” – отсутствие блокирования, “1” – наличие блокирования. Тоже самое можно сказать и в отношении тока. ΔU – сигнал ошибки САК. в1 (t + 1), в2 (t + 1) – сигналы на управление блокирования вентильных групп в следующие моменты времени. Предполагается одновременная подача блокирующих сигналов на обе группы. Синтез ЛПУ по полученным уравнением возможен следующим образом. Строятся диаграммы изменения входных сигналов при реверсе или при снижении скорости с рекуперацией. На диаграмме большими буквами обозначаются аналоговые величины, а малыми – цифровые. На основе полученных диаграмм составляем таблицу состояния, в которой вписаны все возможные значения комбинаций цифровых значений входных сигналов и исходных в момент времени “t”. На основе таблицы состояния для в1 (t + 1) можно записать в1(t+1) =Δu i в1t + Δu i в1t + Δu i в1t + Δu i в1t Таблица состоянияВ этой таблице в столбцах отмечены соответствующие точки на диаграмме состояния, в сроках отмечено состояние соответствующего параметра. В соответствии с приведенными уравнениями записаны уравнения состояния, использованные для записи по срокам логическое умножение, а для записи между соседними сроками логическое сложение. Таблица 1 – Таблица состояния RS триггера В1(t+1) = [(ΔU + ΔU) i +ΔU i ] В1t + ΔU i В1t = ( ΔUi + ΔUi +ΔUi + ΔUi ) В1t _ _
_ _
_ _ _
СОБСТВЕННЫЕ РАЗРАБОТКИ И ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯВ среде пакета Matlab была разработана схема работы ЛПУ (рисунок 7). На входы ЛПУ подаются сигналы наличия тока i и ошибки ?U, которые были получены из диаграммы работы привода в режиме реверса. Состояние этих сигналов определяется таблицей истинности. Исходные сигналы ЛПУ определяются состоянием RS триггера. На рисунке 8 представлена структурная модель RS триггера. В нее входят следующие элементы: устройство памяти предыдущего состояния триггера; таблица истинности триггера. Вход триггера КК (командоконтролер) выполняет функцию разрешения работы (сигнал „1”) и запрет работы триггера (сигнал „0”). Это и есть имитация работы оператора. Для исключения возможности одновременной работы вентилей одной фазы, на выходе RS триггера установленные линии задержки для создания безтоковой паузы.Результаты работы разработанной схемы ЛПУ приведены на осциллограмме (рисунок 9). Эти результаты показывают, что разработанная схема ЛПУ отвечает технологическим требованиям, которые предъявляются к системе управления реверсивными ТП.
ЗАКЛЮЧИТЕЛЬНАЯ ЧАСТЬ ОБЗОР РЕЗУЛЬТАТОВ И ВЫВОДЫГрафики приведенные на рисунках 11 и 12 показывают, что полученные результаты почти полностью соответствуют реальным графикам работы системы ТП-Д в режиме прямого пуска и реверса.ПЕРСПЕКТИВЫ ДАЛЬНЕЙШЕГО ИССЛЕДОВАНИЯВ будущем планируется на базе данной компьютерной модели произвести расчет и разработку аппаратуры диагностики управляемых выпрямителей. Провести лабораторные исследования разработанной диагностической аппаратуры и рассмотреть возможность применения ее в учебных курсах: «Автоматизация, проектирование и исследование электромеханических систем»; «Системы управления электроприводом», «Элементы автоматизированного электропривода».ЛИТЕРАТУРА1. Бессекерский В.А., Попов Е. П. Теория систем автоматического регулирования. - М.: Наука, 1972. - 768 с2. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учебное пособие. – СПб.: КОРОНА принт, 2001. – 320с. 3. Методичний посібник до самостійної роботи з дисципліни “Моделювання електромеханічних систем” (для студентів спеціальності 7.0922.08 «Електромеханічні системи автоматизації і електропривод» очно-заочної форми навчання). / Укл.: О.І. Толочко, Г.С. Чекавський, О.В. Песковатська, П.І. Розкаряка. Донецьк: ДонНТУ, 2006. – 96 с. 4. Толочко О.И. Использование пакета Matlab и его расширения Simulink при исследовании систем электропривода / Методическое пособие (для студентов специальности 7.0922.08). – Донецк: ДонГТУ, 1999. – 87 с. 5. Толочко О.І. Аналіз та синтез електромеханічних систем зі спостерігачами стану. – Донецьк: НОРД-ПРЕС, 2004. – 298 с. |
| ДонНТУ | Портал магистров ДонНТУ |
| Автобиография | Библиотека | Культура Японии |
| Отчет о поиске | Реферат | Ссылки |