

|

|
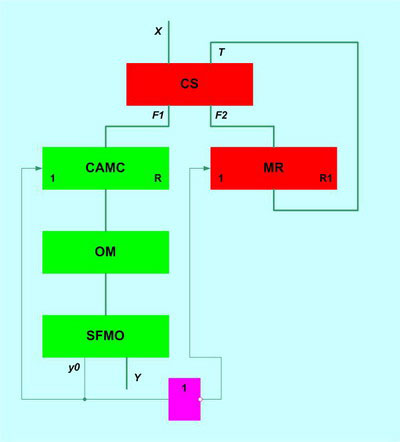
Авторефератна квалификационную работу магистра по теме:"Синтез и исследование композиционных микропрограммных устройств управления с использованием метода кодирования полей совместимых микроопераций"Предполагаемая научная новизна Обзор существующих решений и методов Описание полученных и планируемых результатов ВведениеВ настоящее время во многих сферах производства применяется управление технологическими процессами с помощью цифровых электронных систем. При этом к функционированию и построению этих систем предъявляются разнообразные требования. В одних отраслях производства требуется высокая скорость управления технологическими процессами, а в других – низкие аппаратные затраты при построении систем управления. В этой работе была сделана попытка создать структуру управляющего автомата, которая была бы оптимальной с точки зрения аппаратных затрат и быстродействия. Традиционная структура автомата с "жесткой" логикой имеет наивысшее быстродействие среди всех известных структур синхронных конечных управляющих автоматов. Но автоматы с "жесткой" логикой имеют один большой недостаток – нерегулярность их структуры, что усложняет их реализацию на больших интегральных схемах (БИС). Автоматы с программируемой логикой имеют более регулярную структуру, но имеют при этом ряд недостатков: многонаправленные условные переходы в этих автоматах выполняются за несколько тактов работы; в формате микрокоманд этих автоматов необходимо задавать как минимум один адрес перехода, что увеличивает разрядность микрокоманд и, следовательно, емкость управляющей памяти. Все перечисленные недостатки двух видов управляющих автоматов нивелируются в композиционном микропрограммном устройстве управления (КМУУ), структура которого – это объединение структур автомата с "жесткой" логикой и автомата с программируемой логикой. Структура КМУУ изображена на рис. 1. В такой структуре управляющего автомата многонаправленные условные переходы выполняются за один такт работы автомата, формат микрокоманд таких автоматов имеет только операционную часть и при этом структура такого автомата имеет регулярный характер.
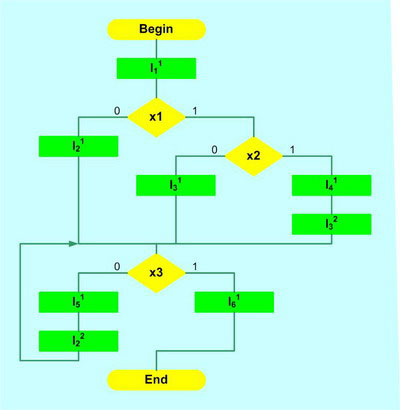
Где: CS – комбинационная схема; CAMC – счетчик адреса микрокоманд; OM – управляющая память; SFMO – схема формирования микроопераций; MR – регистр памяти. Актуальность работыМинимизация аппаратных затрат при построении конечных управляющих автоматов – это классическая задача исследований в области информатики и математики. Научные работники кафедры ЭВМ ДонНТУ уже много лет активно занимаются изучением методов минимизации аппаратных затрат при построении управляющих автоматов, при использовании которых быстродействие автоматов снижается как можно меньше. Мной был предложен метод кодирования полей совместимых микроопераций в операционной части КМУУ и реализация автомата Мили в составе КМУУ в виде двухуровневой схемы MPL автомата. Предложенные в работе методы минимизации аппаратных затрат в КМУУ достигают поставленную задачу при незначительном понижении быстродействия КМУУ. Цели и задачи работыЦелью данной работы является синтез и исследование КМУУ с использованием кодирования полей совместимых микроопераций в операционной части автомата и с применением двухуровневой схемы MPL автомата в составе КМУУ. Синтез и исследование КМУУ выполняются в базисе современных БИС. Для достижения этой цели решаются следующие локальные задачи: изучение существующих методов синтеза КМУУ; анализ существующего элементного базиса БИС; рассмотрение существующих методов кодирования полей совместимых микроопераций; разработка алгоритмов синтеза и оптимизации КМУУ; программная реализация разработанных алгоритмов. Предполагаемая научная новизнаНаучная новизна данной работы заключается в нахождении оптимальной структуры КМУУ с точки зрения аппаратных затрат и быстродействия для реализации алгоритмов управления с определенными параметрами. Была найдена закономерность между параметрами конкретных алгоритмов и структурой КМУУ, на котором реализуются эти алгоритмы, с целью оптимизации структуры КМУУ с точки зрения быстродействия и аппаратных затрат. Практическая ценность работыПрактическая ценность данной работы заключается в построении КМУУ, в котором применяется такая комбинация методов оптимизации автомата, которая ранее не применялась по отношению к КМУУ и которая позволяет достичь максимальную оптимизацию КМУУ с точки зрения соотношения "аппаратные затраты + быстродействие". Также была разработана компьютерная программа синтеза и оптимизации КМУУ по заданным входным параметрам алгоритмов управления. Обзор существующих решений и методовВ настоящее время существует большое количество методов оптимизации конечных управляющих автоматов с разнообразными структурами. Из отечественных ученых, которые занимаются исследованиями в данной области, наиболее известен профессор кафедры ЭВМ ДонНТУ Баркалов А. А. Среди методов оптимизации управляющих автоматов с "жесткой" логикой существуют методы синтеза двухуровневой, трехуровневой и многоуровневой структур автоматов Мили и Мура. Также существуют методы реализации управляющих автоматов на счетчиках. Было разработано множество методов оптимизации автоматов с программируемой логикой и в частности методов оптимизации операционной части этих автоматов. Был разработан ряд алгоритмов минимизации разрядности управляющей памяти при кодировании полей совместимых микроопераций: алгоритм Шварца, алгоритм Грассели-Монтанари, алгоритм Даса, алгоритм ветвей и границ и др. Все перечисленные алгоритмы, кроме алгоритма Шварца, требуют много времени для распределения микроопераций по отдельным полям. Но алгоритм Шварца хоть и является самым быстродействующим, не гарантирует оптимального распределения микроопераций. Описание полученных и планируемых результатовВ результате выполнения работы был разработан алгоритм определения операторных линейных цепей (ОЛЦ) в алгоритмах управления. Пример выделения ОЛЦ в алгоритме изображен на рис. 2.
В результате выделения ОЛЦ и синтеза автомата с программируемой логикой в составе КМУУ алгоритм управления преобразуется к виду, изображенному на рис. 3. В работе был разработан алгоритм преобразования алгоритма управления.
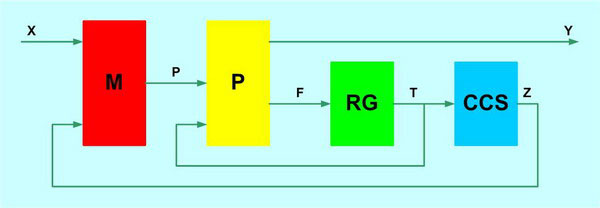
Преобразованный алгоритм управления реализуется в виде MPL автомата в составе КМУУ, структурная схема которого изображена на рис. 4.
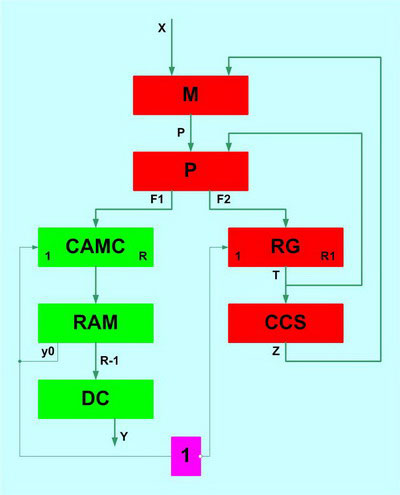
Разработанная структура КМУУ изображена на рис. 5.
Также в работе планируется создание программы, реализующей все разработанные алгоритмы для синтеза КМУУ. ВыводВ результате выполнения работы были проанализированы существующие методы оптимизации структур конечных управляющих автоматов и элементный базис БИС, в котором планируется реализация разработанной структуры КМУУ. Также были разработаны алгоритмы синтеза и оптимизации структуры КМУУ. В дальнейшем планируется разработка программного обеспечения, в котором реализуются разработанные методы и алгоритмы. Литературные источники
|

|
|
|
|
|
|