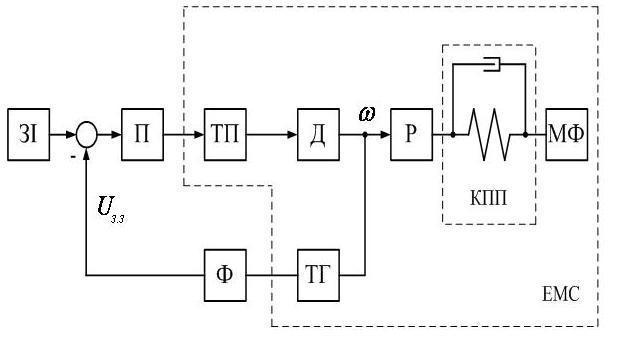
Сучасні відцентрові машини для лиття труб обладнані електроприводами обертання металоформи за системою тиристорний перетворювач – двигун з контуром швидкості двигуна і здавачем інтенсивності (рис.1).
Основним недоліком таких систем є наявність тахогенератора(ТГ), вихідна напруга якого містить колекторні пульсації, що пригнічуються фільтром(Ф).
Останній, через запізнювання сигналу Uз.з зворотного зв'язку за швидкістю двигуна, зумовлює змінення фактичного прискорення електричної машини при розгоні за законом:
 (1)
(1)
де Tф – стала часу фільтру;
Tемс – стала часу електромеханічної системи(ЕМС);
 – задане прискорення, що визначається здавачем інтенсивності.
– задане прискорення, що визначається здавачем інтенсивності.
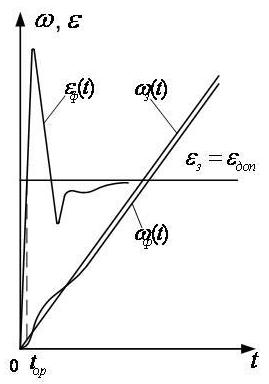
З рівняння (1) випливає, що процес зростання фактичного прискорення на початку розгону – форсований, а перехідний процес
має коливальний характер (рис.2). Це призводить до скорочення тривалості  обмеження ривка, а коливання прискорення
обмеження ривка, а коливання прискорення  викликають перевищення допустимого темпу розгону,
що веде до пробуксовки клинопасової передачі (КПП) між редуктором (Р) і металоформою (МФ) машини.
викликають перевищення допустимого темпу розгону,
що веде до пробуксовки клинопасової передачі (КПП) між редуктором (Р) і металоформою (МФ) машини.
Відмічені недоліки усуваються системою керування з контуром прискорення, де задавач інтенсивності замінюється
джерелом опорної напруги, тахогенератор – давачем прискорення, а підсилювач (П) – інтегральним регулятором прискорення. Найбільш придатним варіантом реалізації зворотного
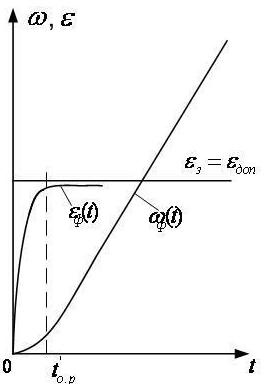
зв'язку за прискоренням є застосування давача прискорення на базі індуктивного акселерометра [1]. З'язок між заданим і фактичним прискореннями в даному випадку описується залежністю:
 (2)
(2)
що визначає експоненціальний характер перехідного процесу (рис.3).
Рисунок 2 – Перехідний процес при розгоні привода з контуром швидкості |
Рисунок 3 – Перехідний процес при розгоні привода з контуром прискорення |
У відповідності з (2), позитивний вплив контуру прискорення на динаміку електромеханічної системи проявляється в плавному
нарощуванні динамічного зусилля при розгоні, з більш повільним процесом обмеження ривка
 , що сприяє зниженню імовірності буксування та зростанню ресурсу пасової передачі
і електромеханічної системи в цілому.
, що сприяє зниженню імовірності буксування та зростанню ресурсу пасової передачі
і електромеханічної системи в цілому.
Пропонована система керування може бути розповсюджена на керовані електроприводи інших механізмів, де має значення
зниження ривків та прискорень в електромеханічних системах.
1. Киклевич Н.А., Харлашкин К.Н., Чепак А.А. Форсированные режимы механического разрушения крепких горных пород и углей. – Киев-Донецк: Вища школа, 1977.–160 с.