Источник: W. Bolton, Mechatronics: Electronic Control Systems in Mechanical and Electrical Engineering (Paperback). - London: 2003. 592p.
Автор перевода: Минаев О. В.
Программируемый логический контроллер является цифровым электронным прибором, который используется для программирования памяти на запоминание программ и выполнения таких функций как логическая, установка и задание последовательности, операции со временем, счёт и арифметические операции в порядке контроля механизмов или процессов и специально сконструированный для облегчения программирования. Логическая составляющая используется так как программирование первоначально связано с выполнением логических и переключающих операций. Входные устройства, т.е. переключатели, и выходные устройства, т.е. двигатели контролируются, будучи соединены с ПЛК и тогда контрольные входные и выходные мониторы согласованные с программой занесённой в ПЛК оператором и таким образом контролируется машина или процесс. Примечательно, что они сконструированы как замена жёстко смонтированного реле и логического таймера, контролирующих системы. ПЛК имеют значительные преимущества, так как имеется возможность изменять контроль системы без перемонтировки соединений входных и выходных устройств, единственное требование чтобы оператор мог вводить через клавиатуру различные изменения программы. К тому же их быстродействие намного выше, чем у релейных систем. Результатом является гибкая система, которая может бать использована для контроля систем, которые быстро и широко изменяют свои свойства и параметры. Такие системы широко используются для выполнения логических контролирующих операций, т.к. легки в использовании и программировании. ПЛКры подобны компьютерам, но обладают возможностями присущими непосредственно им как контроллерам. Это:
1 Они прочные и сконструированы, чтобы выдерживать вибрации, различные температуры, влажность и всевозможные помехи.
2 Интерфейс входов и выходов находится внутри контроллера.
3 Они легко программируются и имеют легко понимаемый программный язык. Программирование первоначально связано с логическими и переключающими операциями.
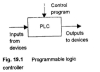
Рисунок 1- Программируемые логические контроллеры
ПЛКры впервые были придуманы в 1968 году. Сейчас они широко используются и распространяются начиная с небольших полупроводниковых устройств для использования с возможно двадцатью входами-выходами, вплоть до модульных систем, которые могут быть использованы для большего числа входов-выходов, цифровых или аналоговых входов-выходов и выполняющих PID режимы управления. Эта статья рассматривает основы конструкции ПЛКров и сколько они могут применяться для контроля машин или процессов.
Базовая структура
На рисунке 2 показана базовая структура ПЛК. В основном он состоит из центрального процессорного устройства (ЦПУ), памяти, и входных-выходных цепей. ЦПУ контролирует и управляет всеми операциями внутри ПЛК. Оно снабжено часами со стандартной частотой между 1 и 8 МГц. Эта частота определяет функциональное быстродействие ПЛК и обеспечивает определение времени и синхронизацию всех элементов в системе. Система шин несёт информацию и данные с выхода ЦПУ, памяти и входных-выходных устройств. Имеются индивидуальные запоминающие устройства: система ROM постоянно передаёт в операционную систему и фиксирует данные, RAM для программ пользователя и временный рабочий запоминающий буфер для каналов ввода-вывода.
Программы в RAM могут быть изменены пользователем. Тем не менее для предотвращения потери этих программ когда выключено питание, в ПЛК используется аккумулятор для сохранения содержимого RAM некоторое время. После программа выведенная в RAM должна быть загружена в EPROM-память и также станет постоянной.Особенности маленьких ПЛК часто определяет размер памяти программы, определяющий количество программных шагов, которые могут быть сохранены. Шаг программы - команда для некоторого случая, который может произойти. Задача программы могла бы состоять из множества шагов и могла бы быть, например: опросите состояние выключателя А, опросите состояние выключателя В, если А и В закрыты, тогда возбудить соленоид Р, который может включить свой выключатель. Когда это произойдёт, то другая задача может быть начата. Типичное число шагов, которые могут быть обработаны маленьким ПЛК, порядка 300 - 1000, что более чем достаточно для большинства контролируемых ситуаций.
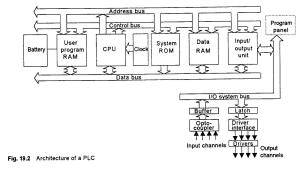
Рисунок 2 - Архитектура ПЛК
Входы/выходы
Порт ввода/вывода обеспечивает связь между системой и окружающим миром. Программы введенные через входной (выходной) порт с панели, которая может изменяться от маленького пульта с жидкокристаллическим дисплеем до клавиатуры с монитором. Альтернативно, программы могут быть введены в систему вручную через ПК, загружаясь через подходящий программный блок. Входные(выходные) порты обеспечивают сигнальную и изолирующую функцию так что датчики и привод могут быть напрямую соединены с ними без необходимости применения других ветвлений. На рисунке 19.9 показано устройство входного порта. Общие входные напряжения 5В и 24В.
Общие выходные напряжения 24В и 240В. Выходные порты подразделяются на порты релейного, транзисторного и тиристорного типа. В случае релейного типа (рис 19.4), сигнал с Г1ЛК выходов используется для включения реле и таким образом может коммутировать токи порядка нескольких ампер во внешней цепи. Реле изолирует ПЛК от внешней цепи и может быть использовано для обоих переключений. Однако, реле относительно медленны в срабатывании. Транзисторный тип выходного порта (рис. 19.5) используют транзистор для коммутации внешних цепей. Это обеспечивает быстродействие переключения. На рисунке 19.5(a), используется общепринятое направление тока от плюса к минусу, выходное устройство направляет ток от выходного модуля вниз, на рисунке 19.5(6) ток протекает от выходного модуля к нагрузке и возвращается к источнику. Оптоизоляторы используются в транзисторных выключателях для обеспечения изоляции между внешней цепью и ПЛК. Транзисторный выход является единственным для коммутации. Тиристорные выхода могут использоваться для контроля внешних нагрузок которые соединены с ...мощным источником питания. Оптоизоляторы также используются для обеспечения изоляции.

Рисунок 3 - Входные каналы

Рисунок 4 - Релейный выход
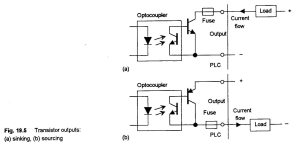
Figure 5 - Транзисторные выходы.
Входные/выходные процессы
Основной вид программирования общий для ПЛКв— многозвенное программирование. Оно состоит из поставленных прграммных задач, объединённых в программные звенья. Таким образом каждое звено может точно определить состояние переключателей А и В, входа, проверить если А и В оба закрыты тогда на соленоид, выход, подаётся питание. Многозвеньевое программирование более детально рассматривается в следующем разделе.
Последовательность для ПЛК при выводе программы может быть определена как:
Проверка входных соединений со звеном многозвенной программы. Выполнение логических операций с входными сигналами. Установка-переустановка выходов для этого звена. Переход к следующему звену и повтор операций 1,2,3. Переход к следующему звену и повтор операций 1,2,3. Переход к следующему звену и повтор операций 1,2,3. Проверка входных соединений со звеном многозвенной программы.
Выполнение логических операций с входными сигналами.
Установка-переустановка выходов для этого звена.
Переход к следующему звену и повтор операций 1,2,3.
Переход к следующему звену и повтор операций 1,2,3.
Переход к следующему звену и повтор операций 1,2,3.
А также закончить программу. Таким образом, каждое звено многозвенной программы проверяется циклично. Существуют два метода, которые могут быть использованы для процессов ввода-вывода:
Непрерывное обновление
Он включает в себя ГЩК, проверяющий входные каналы которые входят в программные комманды. Каждая входная точка индивидуально проверяется и результат определяется программой. Будет встроенная временная задержка, типичная—Змс, когда каждый вход проверяется в порядке гарантирующем, что каждый возможный входной сигнал прочитывается микропроцессором. Эта задержка разблокирует микропроцессор для избежания счёта и ввода сигнала дважды или более часто, если есть биение-отскок контакта в выключателе. Множество входов должно быть проверено, каждый с задержкой в Змс, перед тем как программа содержащая последовательность логических операций будет выполнена. Выходы будут заперты до следующего обновления.
Сканирование входов-выходов.
При использовании непрерывного обновления, имеющего задержку по Змс на каждый вход, время необходимое для проверки нескольких сотен входов-выходов может стать сравнительно долгим. Для обеспечения большей быстроты выполнения программы, специальная часть RAM использует буферную память между логическим контроллером и единицами ввода-вывода. Вначале каждого программного цикла, CPU проверяет все входы и вносит информацию об их состоянии в соответствующие адреса в RAM. Поскольку программа выполнена, сохраненные входные данные прочитаны, над ними выполняются логические операции. Результирующие выходные сигналы запоминаются в резервных ввод-вывод отделениях RAM. В конце каждого программного цикла все выходные данные переносятся от RAM к выходным каналам. Выходные каналы блокируются так, чтобы они могли сохранять данные до следующего обновления.
Программирование
ПЛК программирование основывается на применении многозвенных схем позволяющих представить программу в виде переключающей цепи. Многозвенная схема состоит из двух вертикальных линий, представляющих шины электропитания. Цепи соединены горизонтальными линиями между этими двумя вертикалями. На рисунке 6 представлен основной набор символов которые использованы в примере составления многозвенной схемы.
Каждое звено должно начинаться со входа или нескольких входов и заканчиваться одним выходом. Входы и выходы пронумерованы, обозначения используемые в зависимости от производителей ПЛК, таких как Mitsubishi F серии ПЛК предшествует входным элементам X и выходным элементам Y и использует следующие номера:
Inputs X400-407,410-413
X500-507,510-513
Outputs Y430-437
Y530-537

Рисунок 6 - Многоступенчатая схема
На рисунке многозвенной схемы, рассмотрена ситуация где выход ПЛК возбуждает соленоид, когда нормально открытый выключатель соединённый со входом, активирован будучи закрытым. Соответствующая программа представлена на рисунке 19.76. Начиная со входа мы имеем обычно открытый символ 11. Это могло бы иметь адрес входа Х400. Линия заканчивается с выходом, соленоидом, с символом О. Это могло бы иметь адрес выхода Y430. Чтобы указывать конец программы, выходное звено отмечено. Когда выключатель закрыт, соленоид активизирован. Эта энергия, например, может быть соленоидальным клапаном, который открывается, чтобы позволить воде входить в резервуар.
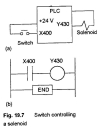
Рисунок 7 - Контрольное подключение соленоида
Другим примером может быть релейный температурный контроль(рис. 8), в котором ввод производится от низкой до высокой, когда температурный датчик достигает температуры срабатывания. При этом выход должен переключиться с "включено" на "выключено". Температурный датчик, показанный на рисунке— термистор, согласованно связанный с выходом операционного усилителя, соединённого как компаратор. Программа показывает вход как обычно закрытую пару контактов, таким образом выдавая. Когда контакты открыты, чтобы выключить сигнала тогда выхода закрыты.

Рисунок 8 - Температурный контроль системы
Такие многозвенные схемы могут быть введены при помощи специальных вспомогательных клавиатур или собраны на экране монитора при помощи мыши. Они могут также быть составлены при использовании мнемонического языка. Они переводятся на машинный язык микропроцессора и связанных с ним элементов.