Перевод с английского: Плис П.С.
В последние годы, нейронные решения были предложены для многих промышленных систем, использующих нейронные сети (НС) либо с прямой связью, либо периодические. Большинство из опубликованных документов описывают применения системы управления с нейросетями, встроенных в обычную обратную связь системы управления. Нейросеть обычно сформирована из сигмоидной характеристической функции нейронов и способности обучения, обычно используемой для обучения сети либо он-лайн, либо офф-лайн. Некоторые способы применения используют нейроны с радиальной характеристической функцией. НС могут играть разные роли: идентификация [105], [212], нелинейный контроллер [131], [225], и определение дефектов [127], [126]. Нейросетевая идентификация параметров системы технически может быть применена к датчикам скорости асинхронного двигателя, например, в [38] параметр в системе для определения – скорость вращения ротора.
Типовые нейронные сети, используемые для определения вероятностей, являются многослойными структурами из нейронов с сигмоидальной характеристической функцией. Есть две
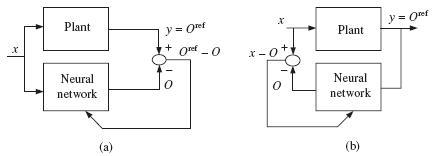
конфигураций для идентификации параметров системы: прямая конфигурации и обратная конфигурация [243]. В случае прямой конфигурации, нейронная сеть получает тот же входной вектор X, как и система, и выход системы управления обеспечивает эталонный выход Oref в процессе обучения (Рис. 4.10 (а)). В ходе выявления, вектор ошибки ||Oref - O|| минимизирована, используя резервный алгоритм обратного распространения ошибки обучения. Как показано на рис.4.10 (б), обратной идентификация параметров системы использует выход у системы как вход для нейро-сети, несмотря на то, что нейро-сеть генерирует аппроксимированный входной вектор системы.
Норма об ошибке вектор быть минимизировано путем обучения через || X -O ||.
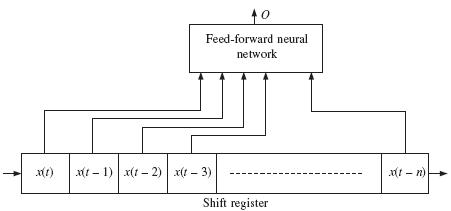
Нейросети с прямой идентификацией генерируют мгновенный ответ, таким образом, они могут моделировать установившиеся системы, напрямую не способных к моделированию ее динамического режима работы. Для учета динамики системы, нейросети с прямой связью должны выдавать ряд последних входов системы. Такой подход предполагает, что НС взаимодействует с верхним регистром, который хранит временные ряды входных векторов (см. Рис. 4.11). Верхний регистр обновляется на каждом шаге операции. Обновление состоит в хранение последнего входного вектора и удалении самого старой входной вектор.
Альтернативным решением является использование регулярных нейронных сетей. Это решение носит чисто на нейронных клетках, состоит в том, что он не требует смены регистра. Тем не менее, большая часть системы управления
использовали первое решение до сих пор, так как динамика алгоритма обратного распространения ошибки требует больше вычислительных ресурсов, чем её визави.
Оба способа идентификации конфигураций имеют свои преимущества и недостатки.
Система идентифицирует параметры реально, но это не всегда подходит для структуры системы управления. С другой стороны, обратная система упрощает систему управления. Однако, само определение не всегда возможно, поскольку в некоторых случаях
более одного вектора X соответствует определенный вектор Y (или серии таких векторов).
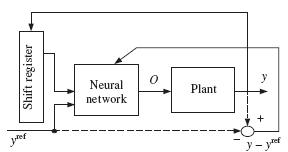
Рисунок 4.12 представляет основную систему управления с использованием нейроконтроллера. Есть две альтернативы: либо нейронная сеть обучается только в офф-лайн с обратной идентификацией конфигурации, как представлено на рис. 4.10 (б), или он изначально обучается в автономном режиме, но обучение продолжается в режиме онлайн в системе управления. Для учебных целей, алгоритм обратного распространения ошибки
алгоритм является наиболее целесообразным. Верхние регистры используются совместно в процессе офф-лайн идентификации и внутри системы управления, чтобы моделировать динамическое поведение системы. Вход нейроконтроллера состоит из самых последних выходов системы плюс эталонный выход на текущий момент. Таким образом, на каждую шаг операции он генерирует вектор управления О такой, что приводит систему для получения ожидаемого выхода.
Применение в определении сигнала ошибки являются частью более широкого класса классификации употребления. Задача нейронной сети заключается в том, чтобы анализировать исходные данные и генерировать информацию о работе установки: нормальная или ненормальная работа.
Во втором случае она может дать более подробную информацию об аномалии: короткое замыкание, превышение напряжения или ограничение скорости и т.д. НС прямого типа обучается в автономном режиме, используя экспериментальные данные, что отражает все возможные режимы работы установки.