

СТРАТЕГИЯ ИССЛЕДОВАНИЯ ВЕКТОРА СОПРОТИВЛЕНИЙ ДЛЯ ОПРЕДЕЛЕНИЯ ЭКСЦЕНТРИСИТЕТА РАБОТАЮЩЕГО АСИНХРОННОГО ДВИГАТЕЛЯ
XVII International Conference on Electrical Machines ICEM 2006
Аннотация:
Разработана общая эффективная стратегия для отслеживания состояния асинхронных двигателей. Стратегия применена для определена уровня динамического эксцентриситета в однородном воздушном зазоре машин, используя полный вектор сопротивления машины как средство прямой оценки надежности машины. Показано, что механизм повреждения который модулирует индуктивность статора, может быть диагностирован более эффективно через оценку полного сопротивления по сравнению с современными методами. Эффективность метода иллюстрирует ряд расчетов на основе полученной методологии.
Ключевые слова: мониторинг состояния, динамический эксцентриситет, мониторинг сопротивления, асинхронный двигатель.
I. Введение
Динамическим эксцентриситетом называется появление явления, когда центр ротора машины не совпадает с центром вращения машины, и поэтому положение минимального воздушного зазора вращается с ротором. Динамический эксцентриситет может быть следствием смещения вала, или изнашивания подшипников, неправильной установкой, изгиба вала, и т.д. Уровень динамического эксцентриситета может быть хорошим индикатором состояния машины. Особенное внимание к этому параметру необходимо проявлять в асинхронных машинах, которые имеют малые воздушные зазоры между ротором и статором, по сравнению с машинами других типов.
Влияние повреждения на гармоники потока, несбалансированность магнитмагнитного притяжения, вибрационные силы, потери и момент, колебания в линейных токах представляло собой особый интерес для исследований [2, 3, 4, 5]. Dorrell [6] продемонстрировал алгоритм, для расчета несбалансированной магнитного притяжения, основываясь на обобщенной гармонике проводника. Работа Cameron и др. [2] была исследована далее Dorrel и др. [5], и рассматренны обобщенные действия статического и динамического эксцентриситета. Htsui и Stein [8] использовали напряжение по концам вала, чтобы обнаружить эксцентриситеты и замыкание витков ротора в синхронных машинах. Аналогичная методика Cardoso и др. [9] используя метод вектора тока Парка для мониторинга состояния машины посредством построения токовых диаграмм машины при различных состояниях. Также была выполнена работа, целью которой было моделирование динамического эксцентриситета, также была выполнена [7, 10].
В этой статье мы намереваемся разработать эффективную общую стратегию для мониторинга состояний асинхронных машин, и мы можем применить метод обнаружения уровня динамического эксцентриситета в однородном воздушном зазоре машины, используя полный вектор сопротивления машины. Используемым методом является усовершенствованный метод преобразования Парка [9]. Текущий способ имеет недостаток - используется сигнал, который содержит много не используемой информации. Различия между аварийным и нормальным режимом накладываются в широком изменении сигнала для всех режимов и поэтому сложны для обнаружения.
II. ПОЛНЫЙ ВЕКТОР СОПРОТИВЛЕНИЯ
Магнитные эффекты, в случае динамического эксцентриситета, происходят из-за изменения величины воздушного зазора, и последующего искажения воздушного распределения плотности магнитного потока в воздушном зазоре. В машинах с динамическим эксцентриситетом МДС обмотки статора действует в воздушном зазоре различной длины и, следовательно, обмотка статора влияет на изменения магнитной проводимости в воздушном зазоре как функция вращения ротора. Обмотки ротора, однако, расположены по-разному в пространстве относительно минимального воздушного зазора, но они не двигаются. МДС трехфазной обмотки ротора действует в воздушном зазоре постоянной длины (но не одинаково).
Результат искажения магнитной проводимости воздушного зазора как описано выше приводит к искажению потокосцепления и изменению полного сопротивления машины. Когда мы ссылаемся на полное сопротивление машины, замеченное на выводах машины, мы имеем в виду классическую схему замещения установившегося режима асинхронного двигателя. В этой статье, в установившемся режиме выражения полного сопротивления получены основываясь на фазных уравнениях.
Идея мониторинга вектора сопротивлений основана на мгновенных значениях, но не на векторах, и действительна для установившегося и переходного режима. Выведение уравнения установившегося режима выполняется для решения вопроса, где рабочие точки при любых нагрузочных условиях пригодны и, конечно, проясняют зависимость от параметров машины.
Давайте, обратим внимание на основные фазные уравнения установившегося режима симметричных асинхронных двигателей [1]:

Так как для любой цепи:


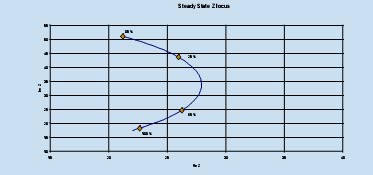
Рисунок 1. - Изменение полного сопротивления от нагрузки
Как можно заметить по рис. 1 в симметричной машине в установившемся режиме сопротивление изображается в виде точки в двухмерном комплексном пространстве для каждого значения нагрузки.
III. ОПРЕДЕЛЕНИЕ ЭФФЕКТОВ ПОВРЕЖДЕНИЙ В СОСТАВЛЯЮЩИХ ПОЛНОГО СОПРОТИВЛЕНИЯ
Магнитные эффекты, в случае динамического эксцентриситета, создаются изменяющимся размером воздушного зазора, и последовательного искажения распределения плотности магнитного потока в воздушном зазоре.
Мы можем записать магнитную проводимость в воздушном зазоре как:

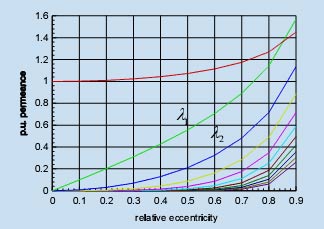
Рисунок 2. - Амплитуды гармоник магнитной проводимости
Определим положение координатных осей рис.3. sD-sQ - координатные оси привязанные к статору, rD-rQ - вращающиеся оси привязанные к ротору. Минимальный воздушный зазор, который вращается с углом выбега ротора, расположен под углом от данного положения ротора. Угол вращения определяется как ωrt .
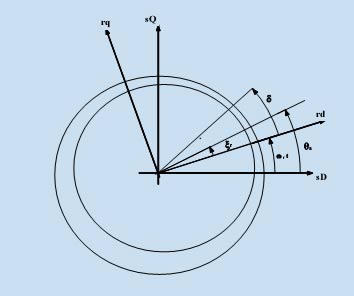
Рисунок 3. - Определение координатных осей
Потокосцепление с обмоткой фазы А может быть рассчитано используя интеграл:

Далее по методу, объясненному подробно в [10], мы получаем следующие выражения для взаимной индуктивности и само индуктивности машины, имеющей динамический эксцентриситет выраженный в координатах ротора:
Lsd - Продольная ось само индуктивности статора
Lsq - Поперечная ось само индуктивности статора
Lrd - Продольная ось само индуктивности ротора
Lrq - Поперечная ось само индуктивности ротора
Ldq - индуктивность перекрестной связи
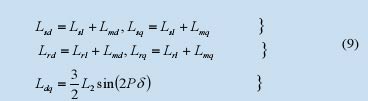
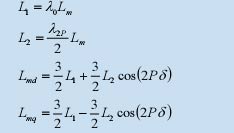
Тщательный анализ вышеупомянутых параметров (9) указывает, что мгновенное значение сопротивления машины обладающей эксцентриситетом больше не будет иметь постоянного по величине значения. Основной эффект таких повреждений в машине - поле становится эллиптическим. Чем больше значение эксцентриситета, тем больше будет значение λ2p и следовательно большая асимметрия.
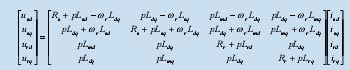
Модель использовалась для генерирования величины напряжения и тока в общей модели, разработанной в [10], в форме матрицы уравнений, выраженных в роторе, как следует:

IV. РАСЧЕТЫ И РЕЗУЛЬТАТЫ
На выводах машины можно легко измерить три фазных мгновенных токов и напряжений, используя ток, вольтметровые щупы и данные полученные с выборкой, для одновременного осуществления выборки. Для трехфазный данных isA, isB, isC, usA, usB, usC, полученных в режиме работы, величины по D-Q осям iD, iQ, uD, uQ, могут быть рассчитаны непосредственно используя преобразования Парка приведенное в (12) где, значение по осям могут быть получены перемещением f величин i и u:

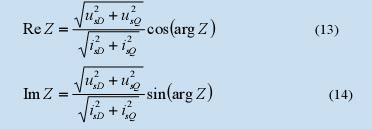

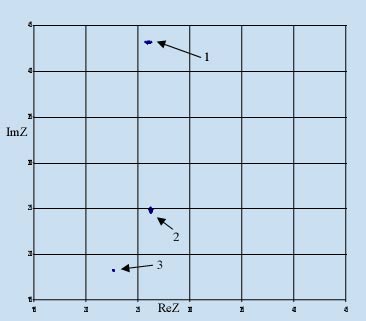
Рис. 4 Годографы Полного сопротивления для 30%-ого динамического эксцентриситета: (1) - нагрузка 25 %, (2) - нагрузка 65 % и (3) - максимальная нагрузка.
Траектории полного сопротивления для трех условий нагрузки, показанных на рис. 4-6, размещены или отцентрированы по расчетам графика установившегося режима, показанных на рис. 1. Как и ожидалось в случае 30%-ого эксцентриситета, показанного на рис. 4, асимметрия вызывает вариации полного сопротивления машины в малых пределах как показано на рис. 5 и 6, так при развитии повреждения оно проявляется в соответственном дальнейшем изменении общего сопротивления.
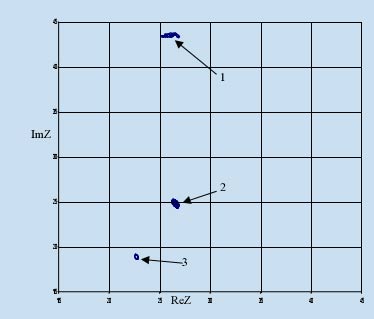
Рис. 5 Годографы Полного сопротивления для 50%-ого динамического эксцентриситета: (1) - нагрузка 25 %, (2) - нагрузка 65 % и (3) - максимальная нагрузка
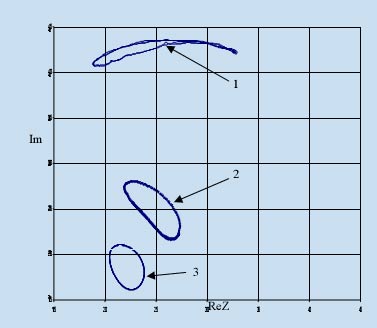
Рис. 6 Годографы Полного сопротивления для 80%-ого динамического эксцентриситета: (1) - нагрузка 25 %, (2) - нагрузка 65 % и (3) - максимальная нагрузка
V. ВЫВОДЫ
Идея исследования вектора полного сопротивления для определения динамического эксцентриситета очень перспективна, так как процедура для ее реализации проста и средства для ее достижения не дорогостоящие. Дальнейшее исследование должно установить требования для применения идеи, используя практические экспериментальные данные.
ССЫЛКИ
[1] P. C Krause, O. Wasynczuk., S. D. Sudhoff, "Analysis of Electric Machinery", IEEE Press, 1994.
[2] J. R. Cameron, W. T. Thomson, A. B. Dow, "Vibration and current monitoring for detecting air gap eccentricity in large induction motors", Proc. IEE Vol. 133, Pt. B, No 3, 1986, pp 155-163.
[3] F. Notelet, G Ravalitera, "Assessment of the induction motor eccentricity deduced from the fluctuations of the feeding currents", Proceedings of ICEM 84, Lausanne, Switzerland, 1984, pp. 1177-1179
[4] D. G. Dorrell, "The effects of dynamic rotor eccentricity in cage induction motors", Proc. UPEC, Univ. Collage Galway, Sept. 1994, pp. 402-405.
[5] D. G. Dorrell, W. T. Thomson, S. Roach, "Analysis of Airgap Flux, Current and Vibration Signals as a Function of the Combination of Static and Dynamic Airgap Eccentricity in 3-phase induction motors", IEEE Trans. on IA, Vol. 33, no 1, 1997, pp. 24-34.
[6] A. Stavrou, J. Penman, " The on-line quantification of air-gap eccentricity in induction machines", Proc. International Conference on Electrical Machines '94, Paris, France, 5-8 September 1994, pp. 261-266.
[7] H. A. Toliyat, M. S. Arefeen, A. G. Parlos, "A method for Dynamic Simulation and Detection Air-Gap Eccentricity in Induction Machines", IEEE Trans. IA, Vol.32, no 4, 1996, pp.910-918.
[8] J. S. Htsui, J. Stein, "Shaft signals of Sailient-Pole Synchronous Machines for Eccentricity and Shorted-Field-Coil Detections", IEEE Trans. On EC, Vol. 9, no 3, 1994, pp. 572-578.
[9] A. J. M. Cardoso, E. S. Saraiva, M. L. S. Mateus, A. L. Ramalho, :"On-line detection of air gap eccentricity in 3-phase induction motors, by Park's vector approach", IEE 5th International Conference on Electrical Machines and Drives, Conf. Publ. No 341, London, UK., 1991, pp 61-66.
[10] A. Stavrou, J. Penman, "Modeling Dynamic Eccentricity in Smooth Air-Gap Induction Machines", Proc of the IEEE International Electrical Machines and Drives Conference '01 Conference CD, Boston, USA, June 2001.