 ; (1)
; (1)Источник: Інформатика та комп'ютерні технології - 2007 / Матеріали III науково-технічної конференції молодих учених та студентів. - Донецьк, ДонНТУ - 2007, с. 77-78.
У сучасній промисловості більшу частку серед всіх підйомно-транспортних механізмів займають крани, на які покладені різноманітні функції: транспортування сировини, переміщення готової продукції, монтаж і ремонт устаткування.
Однієї з головних особливостей кранових механізмів є те, що в більшості випадків вантаж з механізмом пересування зв'язаний не жорстко, а за допомогою пружних зв'язків, що у свою чергу є основною причиною виникнення коливань при його горизонтальному переміщенні. Розгойдування вантажу виникає при пуску й гальмуванні механізмів пересування або повороту крана. Коливання помітно збільшують час технологічного циклу, викликають коливання моменту й нерівномірний рух крана, збільшують навантаження на елементи конструкції кранів, викликають посилене зношування окремих вузлів, а в деяких випадках можуть викликати небезпеку зіткнення вантажу з об'єктами, що розташовані поблизу. Також розгойдування вантажу має особливе значення при автоматизації кранів і для кранів, що здійснюють точні монтажні операції. Виникаючі коливання довго не загасають внаслідок малого опору повітря й малої жорсткості канатів, тому необхідно застосовувати спеціальні заходи щодо демпфірування коливань.
Для зручності дослідження особливостей горизонтального переміщення вантажу необхідно скласти математичну модель двомасової механічної системи із пружними зв'язками, що буде описувати механічну частину кранового механізму.
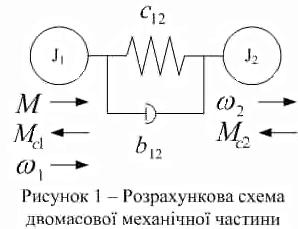
На рис. 1 наведена розрахункова схема найпоширенішої двомасової механічної частини електромеханічної системи. На даній схемі всі величини наведені до швидкості вала двигуна й означають: J1 і J2 – моменти інерції першої (ротора двигуна) і другої (підвішений вантаж) мас відповідно; w1 i w1 – їхні кутові швидкості; c12 i b12 – еквівалентні коефіцієнти жорсткості й в'язкого тертя пружної ланки; M – момент двигуна; Mc1 i Mc2 – моменти опору першої й другої маси, які для спрощення являють собою моменти сухого тертя.
У загальному випадку така система описується рівняннями Лагранжа, які можуть бути записані в наступному виді:
; (1)де q i q* – узагальнені координати (у цьому випадку це кути повороту й кутові швидкості першої й другої мас), i – число ступенів свободи системи (для розглянутої системи i=2), Wк i Wп – кінетична й потенційна енергія.
Кінетичну й потенційну енергії для даної системи можна записати як:
 ; (2)
; (2) ; (3)
; (3) Підставляючи рівняння (2) і (3) в (1) для координат  і
і
 одержуємо:
одержуємо:
 ; (4)
; (4)Тому що на систему діють зовнішні сили (моменти) і є внутрішні сили, які викликають втрати при деформації, рівняння Лагранжа (1) матимуть вигляд:
 ; (5)
; (5)де Q – зовнішні сили, а Qтр – узагальнені сили тертя при деформації, які для перших і другий зосереджених мас відповідно рівні:
 ; (6)
; (6)З рівняння (5) з обліком (4) і (6) одержимо рівняння які після угруповання приймуть вид:
 ; (7)
; (7)По отриманих рівняннях можна скласти структурну схему механічної частини, що наведена на рис. 2.
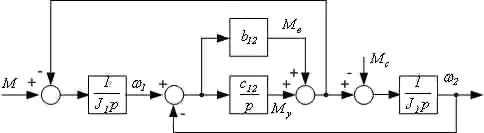
На структурній схемі позначені: Mв=b12(w1-w2) – момент
вязкого тертя,  – момент пружного зв'язку.
– момент пружного зв'язку.
Для розрахунку процесу коливання вантажу зручно скористатися розрахунковою схемою, що наведена на рис. 3.
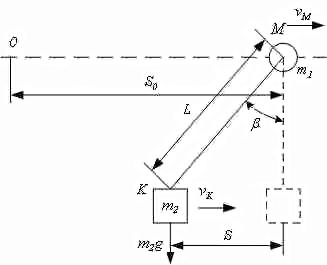
У точці M зосереджені маси обертових елементів механізму пересування й поступального руху (m1). У точці K зосереджена маса вантажу m2. Диференціальні рівняння руху вантажу:
 ; (8)
; (8)де F(t) - сила, що прискорює або сповільнює та прикладена в точці M й у загальному випадку залежить від часу; S0 - поточна відстань від візка до початку відліку в нерухомій системі координат ; S - амплітуда коливань вантажу в рухомій системі координат.
 ; (9)
; (9)У кутових координатах одержимо:
 ; (10)
; (10)де a - прискорення візка крана.
Загальне рішення рівняння (9) при нульових початкових умовах і постійному зусиллі F(t) в періоди розгону й гальмування буде мати вигляд:
 ; (11)
; (11)а в кутових координатах:
 ; (12)
; (12)Максимальна амплітуда коливань вантажу буде дорівнює:
 ; (13)
; (13)Частота коливань вантажу
 ; (14)
; (14)Похідна від (11) дає наступний результат:
 ; (15)
; (15)З формул (11) і (15) витікає, що через проміжок часу
 ; (16)
; (16)відхилення вантажу S й швидкість vK стануть рівними нулю, де n=1, 2, 3... кількість коливань вантажу. У противному випадку коливання зберігаються, а їхня амплітуда залежить від початкових умов.
Існують різні способи демпфірування коливань. Розглянемо деякі з них.
Однієї із запропонованих систем, що дозволяють демпфірувати коливання, є система ТПН-АД [3]. У цій системі використовується тиристорний перетворювач напруги, асинхронний двигун з фазним роторам і чотири щаблі пускових роторних резистора. Пуск двигуна здійснюється східчасто виведенням резисторів у роторному ланцюзі. Даний спосіб припускає розгін до деякої швидкості, при якій коливання закінчуються, а потім здійснюється плавний розгін до номінальної швидкості.
Ще однією запропонованою системою є система ТПС-АД [4], у якій використовуються асинхронний двигун з фазним ротором, роторні резистори й тиристорний перетворювач струму, що включається в роторний ланцюг. У даній системі змінюючи кут відмикання тиристорів можна змінювати механічну характеристику двигуна. Кут відмикання тиристорів регулювався у функції ковзання при підтримці сталості моменту двигуна.
Для демпфірування коливань можливо застосувати систему модального керування [5], для реалізації якої необхідне застосування контролерів, які будуть обчислювати положення вантажу, його швидкість і кут відхилення по вкладених математичних моделях і відповідно до цього видають керуючі впливи.
Ще однією системою демпфірування коливань, заснованої на використанні сучасних інтелектуальних модулів, є система FUZZY керування [6]. У даній системі використовується FUZZY-контролер, що обчислює необхідний керуючий вплив відповідно до вкладеного в нього правилами, які формуються на основі вхідних змінних (положення вантажу, його швидкість і довжина підвісу).
Практичним рішенням є застосування кранової карти виробництва фірми Schneider Electric [7], що являє собою карту контролера для перетворювача частоти Altivar. Даний контролер обчислює корекцію керуючого сигналу залежно від довжини троса, на якому підвішений вантаж, необхідних часів розгону й гальмування, заданої швидкості.