
Источник: Источник: 22nd International Symposium on Automation and Robotics in Construction ISARC 2005 - September 11-14, 2005, Ferrara (Italy)
В последние несколько лет, автоматизация подъемных поворотных кранов занимает всё более важное место в транспорте и погрузочно-разгрузочных работах. Однако каждая операция подъемного крана, с подвешенными на канатах грузами, вызывает колебания груза. Нейтрализация этих колебаний является ключевой проблемой при высоких коэффициентах оборачиваемости, когда требуются эксплуатационная надежность, точные траектории движения и положения. Изменение параметров и силы взаимодействия между вращательным и поступательным движениями в подъемных кранах требует специальных методов при разработке систем управления. В данной работе рассматривается оптимальное управление подъемными кранами вращения. Она покажет, что оптимальное управление успешно решает названные проблемы.
Ключевые слова — подъемный кран вращения, моделирование, демпфирование, оптимальное управление.
Общие системы управления приводом обычно разрабатываются в каскадной структуре и оптимизируются использованием линейных стандартных критериев (Betragsoptimum, симметричный оптимум) с ПИ-регулятором. Текущее ограничение реализуется через ограничение текущего эталонного значения. Эта структура распространена благодаря ее легкой практической реализации. Определенные технологические задачи могут быть учтены наложением контуров управления, которые обеспечивают соответствующие заданные значения для системы привода. Эта структура может быть использована в предложенной устойчивой системе управления подъемным краном. Однако, теория робастного и оптимального управления начинается с описания установки в пространстве состояний и определения оптимальных параметров регулятора, которые также описаны в пространстве состояний. Однако, для практического применения полученная система управления может быть легко преобразована в каскадную структуру, таким образом представленная система оптимального управления не теряет свою универсальность.
Математическое описание движения подъемных кранов вращения значительно отличается от портальных и мостовых кранов. Движение подъемного крана характеризуется появлением сил Кориолиса и центробежных сил. Следовательно, система уравнений управления становится значительно нелинейной, и применение линейных методов теории управления может привести к проблемам. Практические исследования и моделирование доказывают, что оба компонента могут значительно влиять на движение подъемных кранов вращения и что они должны приниматься во внимание, при проектировании и оптимизации системы управления. Для решения этой проблемы могут быть использованы три различных подхода:
Очевидно, что первые два упомянутые метода начинаются с сопоставления известной и описанной моделей установки, обнаружение параметра которой, однако, практически может вызвать проблемы. Кроме того, можно предположить, что задачи управления для подъемных кранов вращения не требуют ни чрезвычайно высокой точности положения, ни точности траектории перемещения. При таком условии кажется интересным использование стратегии управления, которая показывает устойчивость в целом диапазоне возможных изменений параметра так же как сил Кориолиса и центробежных сил, и, кроме того, гарантирует необходимое качество движения. К этой цели в последние несколько лет были развиты несколько сложных способов управления. Хотя их математическое описание в книгах теории управления иногда запутано, они могут быть легко реализованы на практике. Далее рассмотрена реализация ЛК-регулятора для контроля за движением подъемного крана вращения.
Системы оптимального управления подлежат критериям, которые зависит от задачи управления. ЛКР (линейный квадратичный регулятор) представляют специфический практический интерес. Здесь минимизированы средневзвешенное квадратичное значение переменных состояний (например ошибка) и переменной контроля.
Эта модель регулятора представляет компромисс между максимальной доступной динамикой и максимальным значением переменной контроля. Очевидно, что увеличение значения переменной контроля u приводит к ухудшению динамики. Определение параметров обратной связи приводит к известному уравнению Рикатти, которое может быть решено независимо и не представляет проблемы при использовании соответствующего программного обеспечения. Известно, что ЛКР характеризуется хорошей устойчивостью к изменениям параметров [1] и следовательно подходит для системы управления с нечёткими или переменными параметрами.
В теории управления используются нормы для оценки работы (индекс работы) [2], [3]. Так H2 - норма сигнала u

может интерпретироваться как средняя мощность сигнала, тогда как  -норма
-норма

дает максимальное значение сигнала в интервале  . В теории управления
-норма передаточной функции F(s) определяется максимальной амплитудой в
диаграмме Боде или наибольшим отклонением от исходных данных в диаграмме Найквиста, то есть
. В теории управления
-норма передаточной функции F(s) определяется максимальной амплитудой в
диаграмме Боде или наибольшим отклонением от исходных данных в диаграмме Найквиста, то есть
 (4)
(4) Можно показать, что есть прямая корреляция между чувствительностью системы к изменениям
параметра и -нормой. Большая -норма
делает систему более чувствительной к изменению параметров. Тогда проблема проектирования регулятора состоит в выборе
переменных состояний обратной связи, таким образом, чтобы не превысить максимальное допустимое значение
 для -нормы переменных состояний.
Влияние норм соответствующих переменных состояний в конечном результате определяется, подобно ЛКР, через факторы веса.
Однако, здесь вес выбран в зависимости от частоты, таким образом определенные спектры частоты могут быть подавлены или
взяты в особое рассмотрение. Таким образом, в дополнение к устойчивости к переменным параметрам может быть получена
нечувствительность к изменению возмущения в определенном частотном диапазоне.
для -нормы переменных состояний.
Влияние норм соответствующих переменных состояний в конечном результате определяется, подобно ЛКР, через факторы веса.
Однако, здесь вес выбран в зависимости от частоты, таким образом определенные спектры частоты могут быть подавлены или
взяты в особое рассмотрение. Таким образом, в дополнение к устойчивости к переменным параметрам может быть получена
нечувствительность к изменению возмущения в определенном частотном диапазоне.
Для того чтобы описать движение оси подъемного крана вращения, используется эквивалентная
кинематическая схема с сосредоточенными массами, которая представлена на рис.1. У подъемного крана есть 5 независимых
степеней свободы (СС): движение тележки (x координата), вращение поворотного механизма (координата
 ), движение спускоподъемного механизма (координата l), и два
ортогональных угла колебания в направлении движения тележки и перпендикулярно к нему (
), движение спускоподъемного механизма (координата l), и два
ортогональных угла колебания в направлении движения тележки и перпендикулярно к нему ( и
и  соответственно). Задача состоит в расположении груза
вдоль желаемой траектории с заданной точностью, используя систему управления положением для привода тележки,
вращательного и спускоподъемного механизмов. Используя уравнения Лагранжа, система основных уравнений может быть
получена в следующей общей форме
соответственно). Задача состоит в расположении груза
вдоль желаемой траектории с заданной точностью, используя систему управления положением для привода тележки,
вращательного и спускоподъемного механизмов. Используя уравнения Лагранжа, система основных уравнений может быть
получена в следующей общей форме

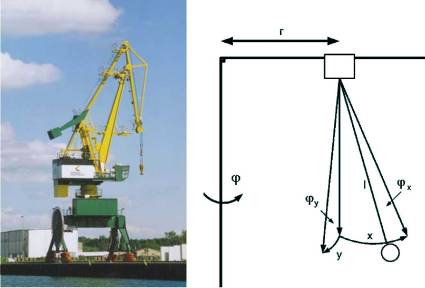
Рисунок 2 изображает уравнение (5) с
M – момент двигателя,
q – обобщенные координаты,
J – матрица Якоби,
B – матрица вязкого трения,
C – матрица сцепления, чтобы вычислить Кориолисовы и центробежные эффекты,
G – матрица тяготения
Это описание – общее описание парных движений, которое широко используется в робототехнике. Если мы предполагаем, что тележка, вращательный и спускоподъемный механизмы оборудованы системами управления положением привода; их координаты могут быть заданы соответствующим значением траектории, а всеми силовыми действиями груза на тележке можно пренебречь. Таким образом полная схема колебательного движения может быть упрощена как показано на рис.3. Система управления будет разработана для упрощенной линейной модели колебаний без учёта сил сцепления и принятием во внимание средней длины каната. Однако, регулятор должен обеспечить удовлетворительное поведение системы как при изменении длины каната, так и при действии сил Кориолиса и центробежных сил во время движения подъемного крана.
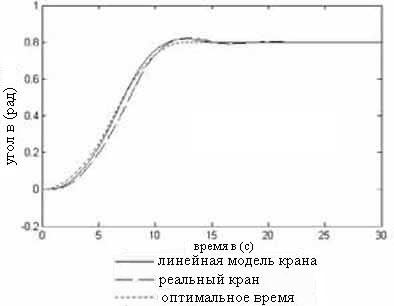
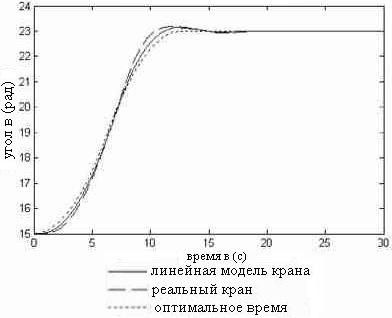
Влияние сил Кориолиса и центробежных сил на неуправляемую систему может быть оценено по рис.4 и 5. Здесь заданные траектории оптимизированы для линейной модели с постоянной длиной каната. В модели подъемного крана вращения тележка, вращательный и спускоподъемный механизмы работают одновременно, а Кориолисово и центробежное ускорение представлено отдельно. Когда механизм тележки перемещает с 15 м до 23 м на максимальной скорости 1.26 м/с, механизм поворота поворачивается с 0 до 0.8 радианов на максимальной скорости 0.126 рад/с и длина каната увеличивается с 36 м до 52 м на максимальной скорости 2.5 м/с.
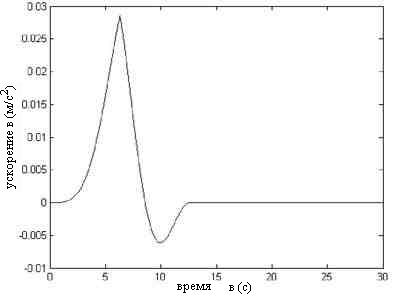
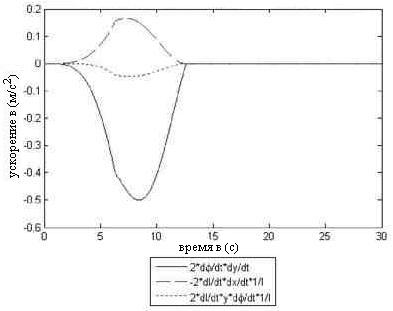
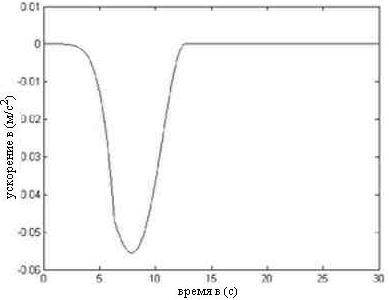
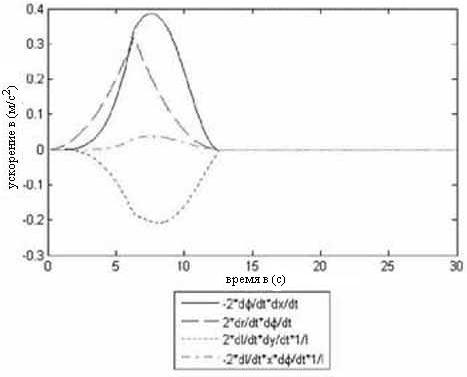
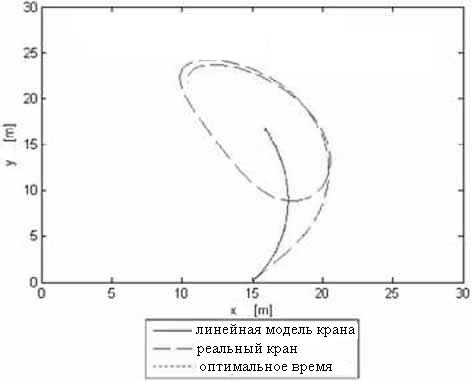
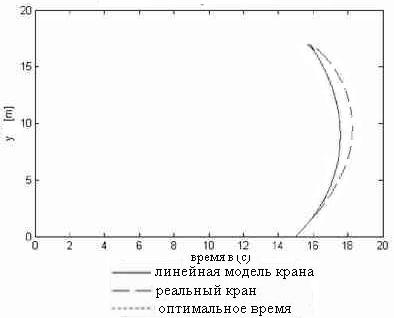
Рис.6 изображает движение груза сверху для линейной модели и подъемный кран вращения с учётом упомянутых сил взаимодействия и изменения длины каната. Очевидно, что нелинейные эффекты вызывают значительное колебание груза, тогда как линейная модель воспроизводит оптимальную траекторию без колебания.
При выборе структуры привода мы начинаем с предположения, что желаемая траектория движения груза задана задатчиком траектории. Эта траектория вычислена для линейной модели колебаний и должна быть воспроизведена реальным подъемным краном. Очевидно, что, изменяя длину каната, возмущения, и упомянутые силы взаимодействия вызывают изменения движения реального подъемного крана. Вышеупомянутые контуры управления вычисляют коррекцию положения, сравнивая фактическую траекторию груза с заданной траекторией, и компенсируют влиянию всех возмущений. Этот механизм управления должен гарантировать требуемое качество движения в целой рабочей области, то есть он должен быть устойчив ко всем упомянутым возмущениям. Рис.7 изображает выбранную структуру привода для механизма тележки. Здесь выход задатчика траектории применен и для реальной установки и для линейной модели колебаний. Последний, следовательно, производит заданную траекторию груза, которая должна быть воспроизведена реальным подъемным краном. Это движение сравнивается с движением реального подъемного крана, и различие между этими двумя движениями компенсируется регулятором.
Чтобы проверить теоретические результаты исследования, вся система основных уравнений моделируется в MATLAB/Simulink, а ЛКР разработан в соответствии с [2]. Рис.8 и 9 показывают движение груза, когда тележка и механизмы вращения активизированы одновременно для переменной длины каната (от 36 до 52 метров). Регулятор был разработан для максимальной длины веревки. Рис.10 изображает движение груза сверху. Отсюда видно, что выбор весовых факторов ошибки и задания может влиять на поведение системы в широком диапазоне.
Движение подъемного крана вращения характеризуется изменением параметров и взаимодействием центробежных сил и сил Кориолиса. Эти эффекты требуют применения робастных способов управления. ЛК-регулятор способен справиться с этими задачами. Представленные результаты управления подъемным краном вращения доказывают хорошую устойчивость и производительность.