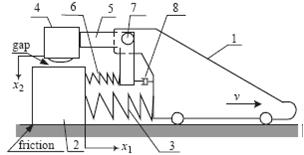
The dry friction at the interface induces a stick-slip motion, which excites the striker 4 to impart blows onto the bit 2. The periodic vibro-impact motion of the system was obtained numerically where the striker 4 impacts on the bit and both the striker and the bit synchronise their periodic motions. The frequency of synchronised motion was estimated as  [1].
[1].
Description of the model of impact penetration
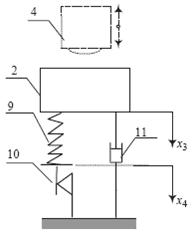
Fig. 2 illustrates schematically the model of the vibro-impact penetration into a medium with visco-elasto-plastic features. This model is built upon considerations in Refs. [2, 3] of the rheological behaviour of materials under vibration and impact loading. The model consists of a spring 9, which is mounted in series with a dry friction element (plug) 10. A viscous element 11 is set parallel to the elasto-plasticelement. The model provides a stepwise downward displacement of the bit, provided the overall forces exceed the threshold of the force D.
The model works as follows: after a blow, imparted by the striker 4 to the bit 2, the spring 9 and the dashpot 11 are deformed gradually due to the visco-elastic properties of the medium. If the overall force developed in the spring is less than the threshold force D, the medium produces visco-elastic resistance only. At this stage, the bit will oscillate about its current position of equilibrium defined by the position of the dry friction element. Whenever the force produced by the elastic element during the compression stage becomes equal or greater than the threshold force
Fig. 1. Model of friction-induced self-oscillatory vibro-impact system. (1) Drive with constant velocity v; (2) bit with mass m1; (3) main spring with stiffness k1; (4) striker with mass m2; (5) lever; (6) secondary spring with stiffness k2; (7) pin; (8) dashpot with viscous coefficient c2.
Fig. 2. Model of vibro-impact penetration into visco-elasto-plastic material. 2-bit; 4-striker; 9-spring with stiffness k3; 10-dashpot with viscous coefficient c3; 11-dry friction element with threshold force D.
D, the footing resistance of the medium instantly changes its nature and becomes plastic. This transformation, however, does not change the instant position and velocity of the bit. This means that the downward movement of the bit and dry friction element continues further as a coupled rigid body motion under a permanent resistance force D and the force developed by viscous element until the bit's motion is arrested. The downward displacement during this latter stage defines the ROP of the drilling bit. The dry friction element slips only in the positive direction of x4.
After a full compression stage, which ends with a plastic slip, the bit executes a backward motion (restitution stage) due to the accumulated elastic energy in the medium corresponding to its yield point. The restitution process is carried out relative to the new position of equilibrium, shifted downward by the value of the plasticdeformation. The progression of restitution flows from the visco-elastic properties of the medium and is completed when the dynamic component of the contact force between the bit and the medium vanishes.
References
- [1] D.R. Pavone, Application of high sampling rate downhole measurements for analysis and cure of stick-slip, SPE28324, 1994.
- [2] B.M. Rebrik, Drilling During the Engineering-Geological Exploration, Nedra, Moscow, 1979 (in Russian).
- [3] M. Spektor, Principle of soil-tool interaction, Journal of Terramechanics 18 (1) (1981) 51-65.