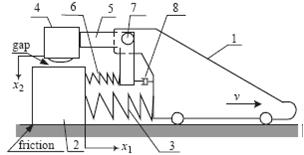
Сухое трение на поверхности вызывает скачкообразное движение, которое возбуждает боек 4 передавать удары на ПРИ 2. Периодическое виброударное движение системы было получено численно когда боек 4 взаимодействует с ПРИ и боек вместе с ПРИ синхронизируют свои периодические движения. Частота синхронизированного движения описывается выражением,  [1].
Рисунок 1 - Модель виброударной самоосцилирующей системы, колебания которой вызваны трением. 1 - привод с постоянной скоростью v; 2 - ПРИ массой m1; 3 - основная пружина с жесткостью k1; 4 - боек массой m2; 5 - рычаг; 6 - вспомогательная пружина с жесткостью k2; 7 - ось; 8 - демпфер с коэффициентом вязкости c2.
[1].
Рисунок 1 - Модель виброударной самоосцилирующей системы, колебания которой вызваны трением. 1 - привод с постоянной скоростью v; 2 - ПРИ массой m1; 3 - основная пружина с жесткостью k1; 4 - боек массой m2; 5 - рычаг; 6 - вспомогательная пружина с жесткостью k2; 7 - ось; 8 - демпфер с коэффициентом вязкости c2.
Описание модели ударного бурения.
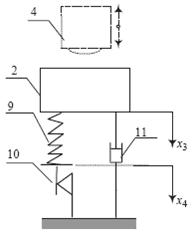
Рис.2 схематично показывает модель виброударного бурения в среде с вязко-упруго-пластичными свойствами. Это модель построена на предположении из [2, 3] о реологическом поведении материалов под воздействием вибрации и ударных нагрузок. Модель состоит из пружины 9, которая смонтирована последовательно с элементом сухого трения (плунжер) 10. Вязкий элемент 11 установлен параллельно упруго-пластичному. Модель позволяет поэтапное смещение вниз ПРИ, вызванное превышением суммы внешних сил предела силы D.
Модель работает следующим образом: после удара, произведенным бойком 4 на ПРИ 2, пружина 9 и демпфер 11 деформируются постепенно благодаря вязко-упругим свойствам среды. Если общая сила развитая пружиной меньше предела силы D, среда создает только вязко-упругое сопротивление. На этой стадии, ПРИ будет колебаться около своего текущего положения равновесия, которое определяется положение элемента сухого трения. Как только сила, созданная пружиной упругого элемента во время этапа сжатия станет равной или превысит предел силы D, сопротивление среды незамедлительно изменит свою природу и станет пластичным. Это преобразование, однако не изменит мгновенного положения и скорости ПРИ. Это означает что движение вниз ПРИ и элемента сухого трения будет продолжаться далее как движение жестко связанного тела под воздействием постоянной силы сопротивления D и силы развитой вязким элементом до прекращения движения ПРИ. Смещение вниз в течении этой дальнейшей стадии определяет скорость бурения. Элемент сухого трения скользит только в положительном направлении x4.
Рисунок 2 - Модель виброударного бурения в вязко-упруго-пластичной среде. 2 - ПРИ; 4 - боек; 9 - пружина с жесткостью k3; 10 - демпфер с коэффициентом вязкости c3; 11- элемент сухого трения с предельной силой D.
После стадии полного сжатия, которая заканчивается пластическим трением, ПРИ производит обратное движение (стадия восстановления) благодаря накопленной упругой энергии среды в соответствии с ее пределом текучести. Процесс восстановления происходит относительно нового положения равновесия, смещенного вниз на значение пластической деформации. Ход восстановления обязан вязко-упругим свойствам среды и завершается когда динамический компонент контактной силы между ПРИ и средой исчезнет.
Перечень ссылок
- [1] D.R. Pavone, Application of high sampling rate downhole measurements for analysis and cure of stick-slip, SPE28324, 1994.
- [2] B.M. Rebrik, Drilling During the Engineering-Geological Exploration, Nedra, Moscow, 1979 (in Russian).
- [3] M. Spektor, Principle of soil-tool interaction, Journal of Terramechanics 18 (1) (1981) 51-65.