Вступ
При вимірюванні цифрових знімків за допомогою ЕОМ основне значення має
рівень автоматизації застосовуваних методів. Одним з найважливіших завдань автоматизації
фотограмметричних вимірів є пошук відповідних (ідентичних) точок на знімках.
Це завдання полягає в тому, щоб положення просторової марки на поверхні моделі
відповідало положенню марок на лівому і правому фотознімках стереопари в ідентичних точках.
Якщо розглядати кілька знімків, то це завдання зводиться до відповідності
положення вимірюваної точки на всіх знімках.
Існує кілька алгоритмів рішення цього завдання. Однак при виборі оптимального
методу необхідно враховувати не тільки точність методу, але й ефективність методу,
простоту обчислень і можливість його реалізації в певних умовах.
Оптимальним критерієм розпізнавання точок для всіх методів служить коефіцієнт
кореляції оптичних щільностей ділянок знімків.
Актуальність теми
Наразі інформаційні технології значною мірою заміняють традиційні.
Так на зміну традиційної фотограмметрії приходить цифрова фотограмметрія.
Цифрова фотограмметрія, на відміну від використання фізичних зображень на склі,
плівці або папері, обробляє зображення в цифровій формі в комп'ютері. При цьому
фотографічне зображення перетворюється в цифрову форму шляхом дигиталізації або сканування.
Зображення також можуть бути отримані в цифровій формі безпосередньо зі спеціальної камери,
встановленої на різних носіях.
Основним завданням цифрової фотограмметрії є вимір знімків і подальша побудова
цифрової моделі місцевості.
Вимірювання знімків виконується шляхом позначення ідентичних точок знімків
стереопари. Таким чином, при вимірюванні знімків виникає необхідність автоматизації пошуку
ідентичних точок. Отже, тема є актуальною.
Зв'язок роботи з науковими програмами, планами і темами
Спеціальність «Геоінформаційні технології» вимагає впровадження інформаційних
технологій у процес геодезичних вимірів, а також обробки результатів вимірів.
Однією з дисциплін кафедри геоінформатики та геодезії є фотограмметрія. Тема магістерської
роботи є одним із завдань цифрової фотограмметрії. Отже, тему магістерської роботи можна
вважати пов'язаної з науковими програмами, планами й темами.
Мета і завдання роботи
Мета роботи : аналіз існуючих методів розпізнавання ідентичних точок
на знімках і вибір оптимального методу розпізнавання відповідних точок, що дозволяє
найбільше ефективно розпізнавати ідентичні точки на знімках.
Ідея роботи: удосконалення існуючої оптимальної на сьогоднішній день
технології розпізнавання відповідних точок на знімках та її подальшій автоматизації.
Основні завдання розробок і досліджень:
1) дослідити існуючі методи розпізнавання відповідних точок на знімках;
2) обґрунтувати оптимальний метод розпізнавання ідентичних точок на знімках;
3) розробити програмний продукт, що дозволяє реалізувати автоматизацію оптимального методу.
Предмет розробок і досліджень методика розпізнавання відповідних точок на знімках.
Метод досліджень: аналіз існуючих методів розпізнавання відповідних точок на знімках.
Обсяг розробок і досліджень: виконані дослідження існуючих методів
розпізнавання відповідних точок на знімках, виконане обґрунтування оптимального методу
пошуку ідентичних точок, програмний продукт перебуває в стадії розробки.
Наукова новизна:Одержання нового програмного продукту, що дозволяє ефективно
розпізнавати ідентичні точки знімків.
Практичне значення отриманих результатів:
1) автоматизація оптимального методу розпізнавання відповідних точок на знімках;
2) скорочення витрат труда на виконання вимірів.
Апробація роботи: Результати досліджень доповідалися на науковій студентській конференції 2009 року.
Огляд досліджень і розробок по темі
Локальний огляд:
1) Могильний С.Г., Беліков І.Л., Ахоніна Л.І., Брежнєв Д.В. Фотограмметрія. - Київ.: Вища школа, 1985.-278 с.
Глобальний огляд:
1) Претт У. Цифрова обробка зображень / Пер. с англ. під ред. к.т.н. Лебедєва Д. С. - М.:Мир, 1982. - 790 с.
2) Дуда Р., Харт П. Розпізнавання образів і аналіз сцен / Пер. с англ. під ред. В.Л. Стефанюка. М.: Мир,1976.
3) Ту Дж., Гонсалес Р. Принципи розпізнавання образів. М.: Мир. 1978.
4) Лобанов А. К., Журкін І. Г. Автоматизація фотограмметричних процесів. М.: Надра, 1980.
Національний огляд:
1) Е.Ф. Чопенко. Ергономічні аспекти стереоскопічних спостережень в автоматизованих комплексах і системах. - Львів: Національний ун-т "Львівська політехніка", 2001.
2) В.В. Гнатушенко. Ідентифікація й аналіз багатокомпонентних фотограмметричних зображень проекційної природи. - Мелітополь, 2002.
3) Іванова Л.І., Єгоров О.І. Основи фотограмметрії - Київ. КНУБА.-2002.-155 с.
Основний зміст роботи
Цифровим знімком місцевості називається зменшене зображення місцевості, приведене
в цифрову форму, тобто записане на машинному носії інформації. Цифрові знімки, що
застосовуються у фотограмметрії, відрізняються тим, що на них існують зображення точок
з відомими координатами або так званих опорних точок. Завдання розпізнавання ідентичних
точок полягає у встановленні ідентичного положення марок в опорних точках на вимірюваних
знімках [2].
Рисунок 1 - Пошук відповідних точок на знімках
(6 кадрів, інтервал між кадрами 100 мс, число циклів повторення 7, об’єм 95 кб)
Залежно від алгоритму розпізнавання відповідних точок розрізняють наступні методи
рішення цього завдання:
1. Аналітичний метод пошуку відповідних точок на знімках. Цей метод являє собою
математичну модель рішення цього завдання з використанням залежності координат точки на
знімку й координат точки на місцевості. Недоліком методу є необхідність знання елементів
орієнтування знімків [5].
2. Метод оцінки контрастів. Заснований на заміні кореляційних функцій релейними й
полярними кореляційними функціями. При цьому виконується заміна вихідного сигналу
кліппованим сигналом, тобто знакозмінним сигналом постійної амплітуди. Достоїнством
методу є використання різних критеріїв пошуку ідентичних точок для різних видів контурів
опорних точок. Недоліком методу є поява методичної помилки, викликаною низьким ступенем
подоби вихідного й заміненого сигналів [8].
3. Метод оцінки образів точок. В основі даного методу лежить поняття образа, тобто
елементарної ділянки знімка. Алгоритм спрямований на пошук параметрів, що задовольняють
критерію ідентичності, сукупність яких називається алфавітом образів. Достоїнством даного
методу є можливість упізнавання декількох пар однойменних точок одночасно. Недоліком
методу є необхідність обчислень коефіцієнта кореляції для всіх образів, що входять в
алфавіт [1].
Оптимальним методом є метод оцінки образів точок оскільки він не вимагає наявності
інформації про вимірювані знімки, такий як елементи орієнтування знімків або види контурів
опорних точок, а також при його реалізації не виникає методичної помилки, пов'язаної з
використанням заміненого сигналу.
Для реалізації даного методу, цифровий знімок розглядається у вигляді сукупності
оптичних щільностей, що відповідають кожному пікселю знімка. Для рішення завдання знімок
розбивається на задане число ділянок, що називаються образами знімка[3].
Таким чином, цифровий знімок являє собою сукупність образів, кожний з яких
складається з більш простих, елементарних образів, що мають відому оптичну щільність [4].
В подальшому розглядається реалізація даного методу на прикладі пари знімків.
При ідентифікації відповідних точок необхідно вибрати еталонний знімок, тобто знімок на
якому буде задаватися вихідна для пошуку точкака. У якості еталонного обраний лівий знімок.
Якщо позначити через  оптичну
щільність одного піксела зображення, то образ знімка можна описати наступним рівнянням: оптичну
щільність одного піксела зображення, то образ знімка можна описати наступним рівнянням:
Для лівого знімка:
 (1) (1)
Для правого знімка:
 (2) (2)
де р - розмірність образа.
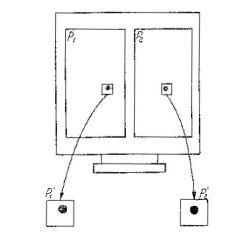
Рисунок 2 - Схема ідентифікації відповідних точок
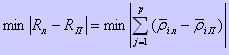
Розпізнавання ідентичних точок стереопари зводиться до пошуку мінімального евклідової
відстані між двома векторами Rл і Rп, що характеризують відповідно образи лівого і правого
знімків стереопари, що можна виразити в наступному вигляді [9]:
 (3) (3)
Шляхом підстановки у рівняння (3) у якості Rл і Rп рівнянь (1) і (2) відповідно,
рівняння (3) здобуває вид:
 (4) (4)
Оскільки початки векторів Rл і Rп не збігаються, то необхідно привести їх до одного
початку. Таким чином, рівняння (4) з використанням центрованих значень цих векторів і в
результаті деяких перетворень набуває вигляду [7]:
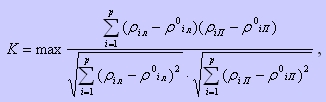 (5) (5)
де  - середні значення оптичних щільностей точок відповідно для лівого і правого образів
знімків, що обчислюють за формулою:
- середні значення оптичних щільностей точок відповідно для лівого і правого образів
знімків, що обчислюють за формулою:
 (6) (6)
На підставі формули (5) обчислюються всі коефіцієнти кореляції, що відповідають кожному
образу правого знімка. Той образ, якому відповідає максимальне значення із всіх обчислених
коефіцієнтів кореляції, є ідентичним еталонному.
Спрощення даного завдання виконується шляхом формування алфавіту образів, що
складається з параметрів образа, при яких коефіцієнт кореляції максимальний [6].
Загальна кількість образів, для яких обчислюються коефіцієнти кореляції обчислюється за формулою:
 (7) (7)
где  — алфавіт образів, що складається із точок рядка правого знімка;
— алфавіт образів, що складається із точок рядка правого знімка;
 — зрушення зображення на правому знімку;
— зрушення зображення на правому знімку;
 — число рядків, що входять в образ на правому знімку.
— число рядків, що входять в образ на правому знімку.
Кількість образів в алфавіті визначається
числом розбивок області правого знімка і обчислюється в такий спосіб:
 (8) (8)
де  — максимальне число елементів, з якого може складатися елементарний образ правого знімка;
— максимальне число елементів, з якого може складатися елементарний образ правого знімка;
р — розмірність образа.
Параметри і у першу
чергу залежать від рельєфу місцевості, зображеного на знімках і можуть бути обчислені за формулою [10]:
 (9) (9)
де  — кут поля зору зображення уздовж лінії;
— кут поля зору зображення уздовж лінії;
 — кут, що характеризує різність висот між двома точками місцевості, що розраховується за формулою:
— кут, що характеризує різність висот між двома точками місцевості, що розраховується за формулою:
 (10) (10)
де  — різність координат уздовж осі X між двома точками місцевості; — різність координат уздовж осі X між двома точками місцевості;
f — фокусна відстань камери.
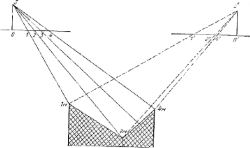
Рисунок 3 - Залежність положення точки на знімку від рельєфу місцевості
Таким чином, швидкість розпізнавання ідентичних точок залежить від числа образів, що
входять в алфавіт n. Отже, чим менше n, тим менше витрати часу на ідентифікацію.
Цей алгоритм є найпоширенішим і на його основі розроблені наступні методи:
1) 1) залежно від числа образів, що входять в алфавіт:
а) зрушувані - число образів, що входять в алфавіт, є лінійною функцією від числа
зрушень, необхідних для пошуку першого образа;
б) кодові - число образів в алфавіті дорівнює загальному числу образів, що зіставляють у
процесі ідентифікації;
в) кодо-зрушувані - число образів, що входять в алфавіт, визначається як функція від
загального числа образів і числа зрушень.
2) залежно від типу області пошуку точок:
а) рядкові - пошук відповідних точок здійснюється уздовж тільки однієї заданої
сторони кожного зі знімків стереопари;
б) площадний алгоритм - пошук відповідних точок виконується по елементарних ділянках,
що містить кілька рядків знімків стереопари;
в) синтез площадного і рядкового методів.
Висновки
Основною проблемою при рішенні завдання розпізнавання відповідних точок є те, що при
пошуку відповідних точок для однієї точки еталонного знімка існує цілий ряд точок на інших
знімках, які мають приблизно рівні коефіцієнти кореляції. При цьому найбільший коефіцієнт
кореляції може припадати на образ, що не є ідентичним образу на еталонному знімку, що
значно знижує точність усього методу.
Також однією із проблем є велика кількість часу, затрачувана на обчислення коефіцієнта
кореляції для всіх образів на інших знімках. Особливо ця проблема актуальна при пошуку точок
для декількох пар знімків.
Основні джерела виникнення таких проблем:
1) критерій, обраний для розпізнавання ідентичних точок;
2) параметри математичної моделі розпізнавання;
3) крок дискретизації фотозображення по осях знімка;
4) точність обчислення коефіцієнта кореляції оптичних щільтностей;
5) наявність різного виду шумів;
6) характер місцевості, зображеної на знімку.
Найпоширенішими є методи пошуку відповідних точок, що опираються на обчислення
коефіцієнта кореляції образів знімків.
Такі методи є досить трудомісткими, оскільки вимагають обчислення великої кількості
коефіцієнтів кореляції. Спростити дане завдання дозволяє більш точне завдання області
пошуку точок на пошуковому знімку. Уточнення реалізується шляхом завдання області
перекриття знімків або аналітичного завдання рельєфу, зображеного на знімках. У цьому
випадку методи стають більш ефективними і легко реалізованими.
При написанні даного автореферату магістерська робота ще не завершена. Остаточне
завершення - грудень 2009 р. Повний текст роботи і матеріали по темі можуть бути отримані
у автора або його керівника після зазначеної дати.
Список використовуваної літератури:
1. Лобанов А.К., Журкін І.Г. Автоматизація фотограмметричних процесів. М.: Надра, 1980.
2. Могильний С.Г., Беліков І.Л., Ахоніна Л.І., Брежнєв Д.В. Фотограмметрія. - Київ.: Вища школа, 1985.-278 с.
3. Претт У. Цифрова обробка зображень / Пер. с англ. під ред. к.т.н. Лебедєва Д. С. - М.: Мир, 1982. - 790 с.
4. Михайлов А. П. Макетні стереопари цифрових знімків для тестування систем автоматичної ідентифікації відповідних точок [Електронний ресурс] / Геоіформаційний портал ГІС-асоциації, - http://www.gisa.ru/3810.html .
5. Дмитрієв В.Г., Сюняєв Ш.І. Аналітичне завдання областей автоматичного пошуку відповідних точок на знімках // Вісті Вузів. Геодезія та аерофотознімання. - 1990. - № 2. С. 104-113.
6. Дунаєв А. А., Лобив І. В., Мурзін Ф. А., Половинко О. Н. Алгоритми швидкого пошуку фрагментів фотографічних зображень [Електронний ресурс] / Інститут систем інформатики ім. А.П. Єршова СО РАН, - http://www.iis.nsk.su/preprints/articles/pdf/sbor_kas_10_murzin_polovinko_lobiv.pdf
7. Биков Л. В., Єссін А. С., Макаров А. П. Дослідження алгоритмів автоматичної ідентифікації точок на парі відеознімків. [Електронний ресурс] / Омська філія ФКЦ «Земля». Статті, доповіді, - http://www.sibrcc.ru/info/article.php?show_art=yes&id_article=15 .
8.Акулова Л.В., Зданович В.В., Броварников В.Т. Автоматизація стереовимірювань на основі кореляційного аналізу // Автоматизація процесів керування і обробки інформації. - Львів, 1980. - С. 83-88.
9. Шароватов Г.Л., Селянинова Т.Н, Борисов Е.А. Автоматизація фотограмметричних вимірів координат маркірованих точок // Геодезія й фотограмметрія. - Ростов на Дону, 1984. - С. 61-66.
10. Краснов В.І. Метод автоматичного визначення ідентичних точок стереозображень // Вісті Вузів. Геодезія та аерофотознімання. - 1981. - № 12. С. 40-46.
|

{kind=link}