Донецкий Национальний Технический Университет |
Реферат по теме магистрской работы:АктуальностьВ настоящее время все большее распространение на практике приобретают электроприводы на базе двигателей переменного тока, прежде всего – асинхронные двигатели (АД) и синхронные двигатели с постоянными магнитами на роторе (СДПМ). В зависимости от конкретных условий к системе электропривода (ЭП) могут предъявляться требования по отсутствию механических датчиков на валу двигателя. При этом обычно возникает задача согласования требований по точности системы и динамических свойств с требованиями конкретного технологического процесса. Цели:Исследовать алгоритмы косвенного регулирования скорости двигателей переменного тока.Введение:Под косвенным регулированием скорости понимается достижение заданных показателей точности регулирования скорости без непосредственного ее измерения. В зависимости от требований, предъявляемых к статическим и динамическим характеристикам системы, возможно применение как скалярного, так и векторного принципа управления. При скалярном управлении задача обеспечения требуемой точности может решаться без использования датчика скорости достаточно просто (компенсация статизма, улучшение закона управления) с достижением диапазона регулирования скорости до 10:1, но при этом динамические свойства системы специально не контролируются. Более интересной является задача косвенного регулирования скорости в системах векторного управления, когда следует обеспечить качество как статических характеристик, так и переходных процессов. Диапазон регулирования скорости при этом практически не превышает 50:1. Исследование точности идентификаторов скорости
Существует методы идентификации скорости делят на 5 групп [1]:
• неадаптивные методы (скорость рассчитывается через доступные для
измерения координаты, например, ток и напряжение);
• адаптивные методы (с помощью замкнутых наблюдателей);
• методы, основанные на конструктивных особенностях двигателей;
• нелинейные методы, базирующиеся на теории нейронных сетей;
• методы, использующие дополнительные высокочастотные сигналы или другую дополнительную информацию. В реферате приводятся результаты
исследования точности вычисления скорости с помощью математических моделей потока (идентификаторов) , которые строятся на основании математической связи
напряжений, ЭДС, токов двигателя с его скоростью.Асинхронный двигатель характеру протекания процессов в нем наиболее близок к обобщенной электрической
машине, поэтому исследование способов идентификации
скорости целесообразно выполнить в первую очередь на примере АД. В основе идентификации скорости
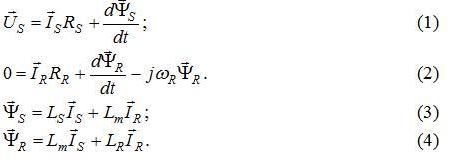
лежат уравнения Парка-Горева для электромагнитных контуров АД в неподвижной системе координат Суть косвенного
определения скорости сводится в том, что [1] электрическая скорость, фигурирующая в (2), может вычисляться на основании информации о
других координатах, входящих в (1) – (4). К числу наиболее простых
идентификаторов (вычислителей) скорости относятся следующие:
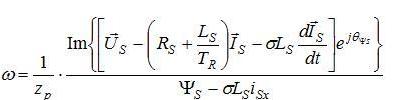
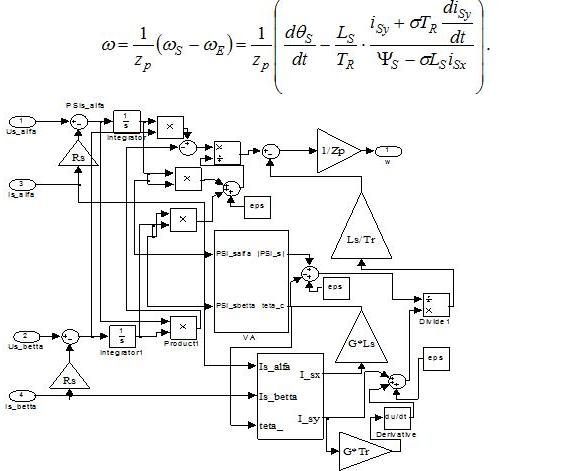
1) Посредством идентификации потокосцепления
статора и вычисления скорости в системе координат x,y, ориентированной по вектору :
Модель идентификатора приведена на рис.1.
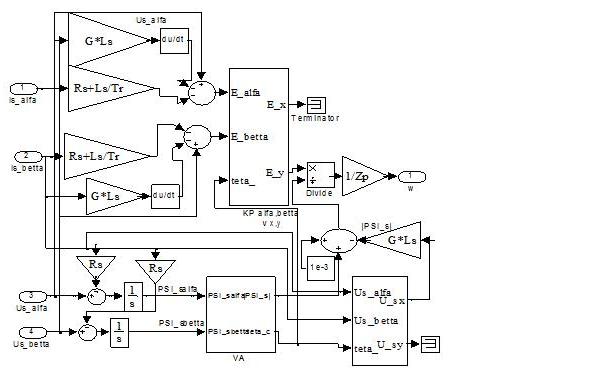
Рисунок 1- Идентификатор скорости с использованием 2) Посредством
идентификации потокосцепления ротора и вычисления частоты скольжения с последующим вычислением скорости в системе координат d,q,
ориентированной по вектору Рисунок 2 -
Идентификатор скорости с вычислением частоты скольжения
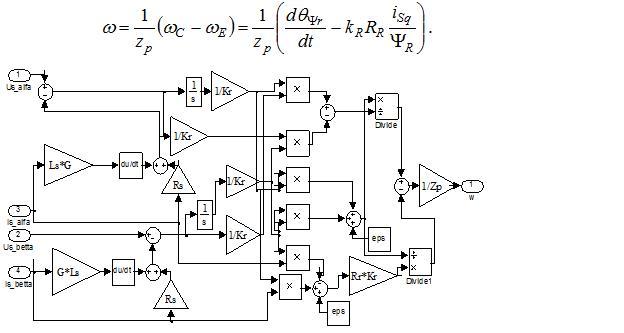
3) Посредством идентификации
потокосцепления статора и вычисления частоты скольжения с последующим вычислением скорости в системе координат x,y: Рисунок 3 – Идентификатор
с использованием идентификатора Перечисленные методы идентификации предполагают достаточно точное измерение фазных напряжений и токов двигателя, а также наличие необходимых средств фильтрации.Точность идентификации, кроме того, зависит от следующих факторов: - точности используемого уравнения идентификации; - необходимости реализации операций чистого интегрирования или дифференцирования; - чувствительности идентификаторов к изменению параметров АД. В среде программного пакета Matlab/Simulink было выполнено исследование перечисленных идентификаторов на предмет точности определения скорости, а также их чувствительности к изменению параметров АД. В качестве исследуемого режима принят режим прямого пуска без нагрузки с последующим набросом нагрузки на установившейся скорости. В частности, на рис.4 показаны графики переходных процессов при полном совпадении параметров АД и идентификаторов полученные в результате моделирования указанного режима работы на примере двигателя МТК 011-6 (P=1400 кВт, 380 В, 870 об/мин, 50Гц).
Вывод:Анализ графиков показывает, что наиболее точным оказался метод идентификации согласно способа 3, однако следует отметить, что он дает повышенную абсолютную погрешность оценки скорости в начальный период прямого пуска. Остальные идентификаторы являются статическими, т.е. дают установившуюся ошибки идентификации скорости в разных режимах работы.В результате исследований получено также, что способ 3 дает наименьшую чувствительность к изменению параметров АД, а способ 1 – наибольшую. При написании данного автореферата магистерская работа не завершена. Окончательный вариант работы можно получить у автора или научного руководителя после декабря 2010 года. Обзор литературы:
|