Вентильний двигун – електромеханічна система, що складається з синхронної машини та перетворювача частоти (ПЧ),
в якій фази ПЧ перемикаються у функції положення ротора. Унаслідок відсутності механічного колектора синхронний
двигун з постійними магнітами (СДПМ) має значні переваги перед двигуном постійного струму:
• відсутність вузлів, що вимагають техобслуговування – безколекторна машина;
• забезпечення вибухобезпеки;
• велика перевантажувальна здатність за моментом;
• висока швидкодія, можливість оптимізації режимів роботи за швидкістю і навантаженню;
• найвищі енергетичні показники;
• висока надійність і підвищений ресурс роботи;
• низький перегрів електродвигуна, при роботі в режимах з можливими перевантаженнями.
Таким чином, переваги СДПМ з електронними системами керування поєднують у собі кращі якості
безконтактних двигунів і двигунів постійного струму, а часто і перевершують їх. У зв`язку з цими перевагами
СДПМ потроху витісняють двигуни постійного струму з традиційних їм сфер застосування. Зараз на базі СДПМ
будуються слідкуючі електроприводи подач верстатів з числовим програмним керуванням та промислових роботів,
електроприводи побутових приладів (магнітофони, вентилятори комп`ютерних блоків живлення, дисководи тощо)
малої і дуже малої потужності [7].
Актуальність теми
СДПМ з синусоїдальним керуванням струмом використовують для побудови систем векторного керування моментом
та швидкістю, яке дозволяє забезпечити високу якість характеристик ЕП як у статиці, так і у динаміці, тому що при цьому
формується роздільне керування електромагнітних та механічних величин. На сьогоднішній день традиційно застосовують
такі актуальні напрямки удосконалення промислових електроприводів:
• удосконалення силової схеми і алгоритмів керування комутацією сучасних напівпровідникових перетворювачів енергії,
які найбільш часто тепер виконуються на базі скалярної або векторної широтно–імпульсної модуляції (ШІМ);
• удосконалення алгоритмів керування за рахунок введення у число регульованих координат, що не можуть бути виміряні
безпосередньо (магнітне потокозчеплення, електромагнітний момент);
• відхід від застосування механічних датчиків на валу двигуна (для вимірювання швидкості, кутового положення), що
дозволяє підвищити експлуатаційну надійність ЕП.
Мета та задачі роботи
Мета роботи – дослідження системи векторного регулювання електроприводом на основі синхронної машини з постійними
магнітами в залежності від налаштувань, що застосовуються при наладці контурів регулювання.
Об’єктом дослідження є система векторного регулювання електроприводом на основі синхронної машини з постійними
магнітами з ідентифікатором параметрів.
Головні задачі дослідження – ідентифікація потокозчеплення статора, обчислення електромагнітного моменту, ідентифікація
швидкості, визначення початкового кутового положення ротора.

Основний зміст роботи
1 Математичний опис та структурна схема СДПМ у рухомій системі координат,
орієнтованій за ротором
При дослідженні режимів роботи в обертових електричних машинах доцільно використовувати координатну систему,
жорстко зв'язану з ротором [6]. Оскільки ротор досліджуваної машини має магнітну асиметрію, тобто різні магнітні провідності
в двох взаємно перпендикулярних вісях, просторові вектори будуть розкладатися на дві складові у напрямку подовжньої (d)
і поперечної (q) вісях, причому напрямок вісі d приймається за дійсну вісь, а q – за уявну.
Рівняння, що описує електричну частину синхронної машини з постійними магнітами в координатній системі, що
обертається зі швидкістю ротора, з урахуванням відсутності роторних обмоток може бути складене на основі 2-го закону
Кірхгофа:
 (1)
(1)
де  – вислідний вектор напруги на статорній обвитці;
– вислідний вектор напруги на статорній обвитці;
 – вектор потоку ротора;
– вектор потоку ротора;
 – ЕРС від потоку розсіювання статора;
– ЕРС від потоку розсіювання статора;
 – проти–ЕРС, обумовлене основним магнітним потоком машини, що створюється магнітами ротора.
– проти–ЕРС, обумовлене основним магнітним потоком машини, що створюється магнітами ротора.
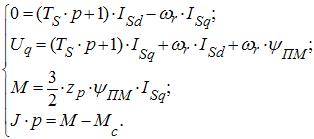
Розкладаючи у вираженні (1) вектора на діючі та уявні частини по вісях d, q, одержуємо систему рівнянь:
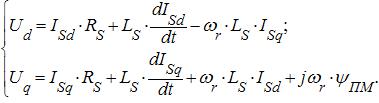 (2)
(2)
Обертовий момент двигуна, з огляду на збіг напрямку вектора з віссю магнітного поля ротора d, можна записати у такий спосіб:
 (3)
(3)
Умова механічної рівноваги описується виразом:
 (4)
(4)
Поєднуючи вирази (2), (3), (4), одержуємо систему рівнянь, яка описує роботу синхронної машини. Спростимо запис рівнянь, скориставшись оператором Лапласа, замінивши
 Після перетворень одержуємо:
Після перетворень одержуємо:
 (5)
(5)
де  – стала часу двигуна.
– стала часу двигуна.
На основі рівнянь (5) будуємо структурну схему синхронного двигуна зі збудженням від постійних магнітів, яка показана на рис.1 [10].
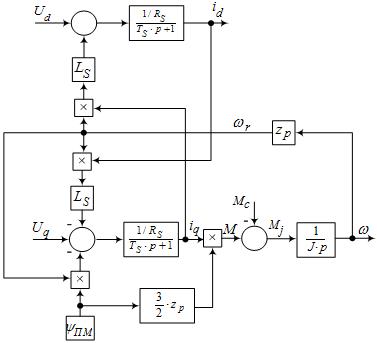
Рисунок 1 – Структурна схема СДПМ
2 Ідентифікація регульованих координат системи
У теперішній час є актуальною задача ідентифікації регульованих координат: потокозчеплення статора, швидкості,
моменту, початкового кутового положення ротора. Ідентифікатор координат забеспечує достатню точність. Відновлені
сигнали можуть бути використані для організації регулювання, а також для удосконалення алгоритму керування.
Сучасні підходи до рішення задачі ідентифікації не передбачають наявності на валу двигуна механічних датчиків, що
дозволяє підвищити експлуатаційну надійність електроприводів, у тому числі при їхній експлуатації в агресивних і
вибухонебезпечних середовищах.
На даному етапі досліджень було розроблено тільки ідентифікатор потокозчеплення, моменту та швидкості.
Вживаються заходи для подальшого визначення початкового кутового положення ротора.
2.1 Ідентифікація потокозчеплення статора
Задача ідентифікації потокозчеплення статора – визначити у кожний момент часу миттєве значення вектора потокозчеплення
статора та кутового положення, не прибігаючи при цьому до безпосереднього вимірювання магнітного потоку.
На рис.2 представлена замкнена схема спостерігача потоку статора, яка виявляє собою комбінацію моделі струму та напруги.
При високих швидкостях краща модель напруги, тому що вплив опору статора невеликий у той час, як при малих швидкостях
краща модель струму, тому що вона працює з нульової частоти (швидкості). ПІ – коректор передбачено для цього розмежування.
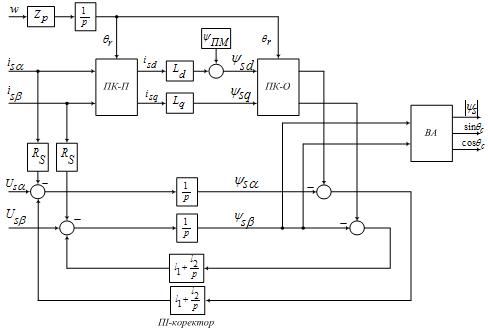
Рисунок 2 – Спостерігач потоку статора
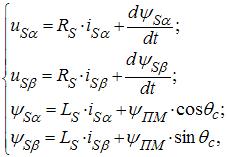
Рівняння напруги у координатах статора:
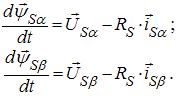
Рівняння потокозчеплення та струму статора в координатах d, q:
Ортогональні проекції вектора потокозчеплення статора,
надходять у векторний аналізатор (ВА), який обчислює модуль вектора потокозчеплення статора:
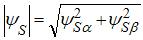 (6)
(6)
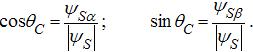
та гармонічні функції його кутове положення:
2.2 Ідентифікація електромагнітного моменту
При відомих значеннях проекцій
 момент СДПМ може бути обчислено за формулою:
момент СДПМ може бути обчислено за формулою:

Структурна схема відповідного ідентифікатора моменту СДПМ наведена на рис.3.
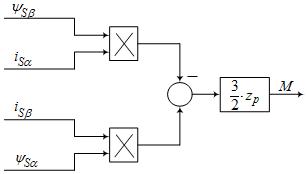
Рисунок 3 – Структурна схема ідентифікатора моменту
2.3 Ідентифікація швидкості
Сучасні принципи ідентифікації швидкості двигунів змінного струму використовують математичний опис двигуна в нерухомій ортогональній системі координат
 . При цьому ідентифікаторам властиві недоліки,
які полягають у необхідності реалізації операцій інтегрування, що призводить до накопичення похибки особливо на низьких частотах обертання двигунів.
. При цьому ідентифікаторам властиві недоліки,
які полягають у необхідності реалізації операцій інтегрування, що призводить до накопичення похибки особливо на низьких частотах обертання двигунів.
Математичний опис електромагнітних процесів у електроприводі на
основі синхронного двигуна зі збудженням від постійних магнітів має вигляд [2]:
 (7)
(7)
де  – проекції векторів напруги,
струму і потокозчеплення статора на осі стаціонарної системи координат статора
відповідно.
– проекції векторів напруги,
струму і потокозчеплення статора на осі стаціонарної системи координат статора
відповідно.
Аналіз (7) відображає можливість визначення проекцій
 двома засобами – по–перше, використовуючи
інформацію про вимірювану напругу і струм статора, і застосуванні операції інтегрування; по–друге, використовуючи інформацію про номінальне значення
потокозчеплення постійних магнітів і вимірюваний струм статора.
двома засобами – по–перше, використовуючи
інформацію про вимірювану напругу і струм статора, і застосуванні операції інтегрування; по–друге, використовуючи інформацію про номінальне значення
потокозчеплення постійних магнітів і вимірюваний струм статора.
При відомих значеннях проекцій
і їхніх похідних швидкість СДПМ може бути обчислено за формулою:
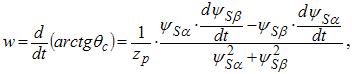
що разом з виконаним аналізом (7) дозволяє припустити, що при побудові алгоритму ідентифікації швидкості можна уникнути операції інтегрування.
Структурна схема відповідного ідентифікатора швидкості СДПМ наведена на рис.4.
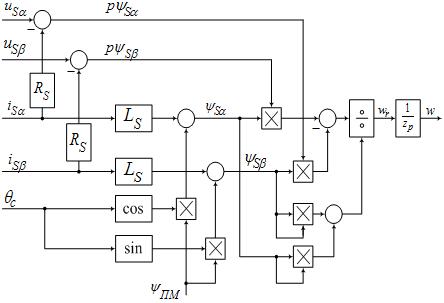
Рисунок 4 – Структурна схема ідентифікатора швидкості СДПМ
Проведені дослідження методом математичного моделювання показали, що ідентифікатор координат забезпечує достатню точність. Відновлені сигнали можуть бути
використані для організації регулювання при відмовленні від використання механічних датчиків на валу СДПМ, а також для удосконалення алгоритму керування.
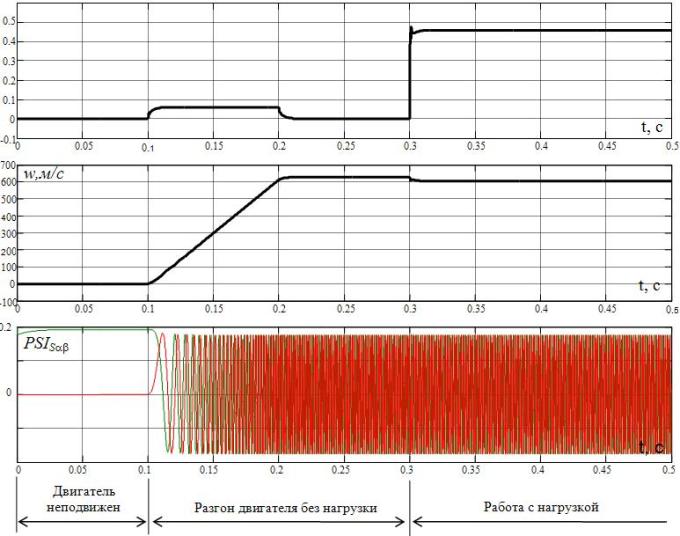
Рисунок 5 – Ідентифікація координат електропривода при роботі системи векторного керування СДПМ
Висновки
На даний момент часу ведеться розробка системи векторного керування
СДПМ. Узагальнена функціональна схема системи векторного керування моментом, швидкістю та кутовим положенням ротора СДПМ зображена на рис.6.
Реалізація векторного керування передбачає реалізацію властивостей
частотно–струмового керування. Тобто, що точніше та швидкодійніше буде підсистема векторного регулювання струмом ПВРС, тим більш якісну систему можна побудувати.
У теперішній час таких методів два: ПІ-регулювання струму в обертовій системі координат, релейне регулювання струму у фазних координатах [6].
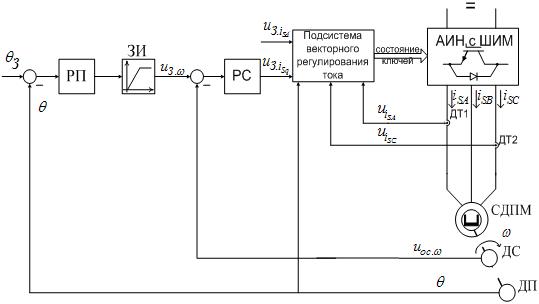
Рисунок 6 – Функціональна схема системи векторного керування СДПМ
При написанні данного автореферату магістерська робота не завершена.
Остаточний варіант роботи можна отримати у автора або наукового керівника після грудня 2010.
Огляд літератури
1. Майборода В. Н. Исследование сервоприводов на основе синхронных машин с постоянными магнитами (
http://masters.donntu.ru/2008/eltf/mayboroda/diss/index.htm)
2. Ищенко И. В. Исследование систем управления электроприводами на основе вентильных двигателей
(http://www.masters.donntu.ru/2009/eltf/ishchenko/diss/index.htm )
3. Божко В.В., Толочко О.І., Чекавський Г.С. «Аналіз впливу перехресних зв'язків в
системі векторного керування СДПМ»
4. Сарычев А.П., Портной Ю.Т., Раскин Л.Я. и др. «Векторное бездатчиковое
управление электроприводом на базе СДПМ»
5. Корельский Д.В. «Обзор современных методов управления СДПМ»//Радіоелектроніка. Інформатика. Управління. - 2001. №2 - с.155-159
6. Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием. – 265 с.
7. Казачковський М. М. Комплектні електроприводи. – Дніпропетровськ, Обліково-видавн. 2003. – 224 с.
8. Герман-Галкин С. Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0. – СПб.: КОРОНА принт, 2001. – 320 с.
9. Овчинников И. Е. Вентильные электрические двигатели и привод на их основе (малая и средняя мощность): Курс лекций. СПб.: КОРОНА-Век, 2006. – 336 с.: ил.
10. Виноградов А.Б. Векторное управление электроприводами переменного тока/ГОУВПО «Ивановский государственный энергетический университет имени В.И. Ленина». - Иваново, 2008. - 298с.
ДонНТУ >
Портал магістрів ДонНТУ >
Про автора
