The voltage-current closed-loop observer is presented here in some detail.
The voltage model in stator coordinates is
while the current model, in rotor coordinates, is:
The current in rotor coordinates
The stator flux is transformed back to stator coordinates as
It is evident from the above that the voltage model is plagued by the stator resistance error and the integration drift at low frequencies.
The current model is influenced by parameter detuning (due to magnetic saturation) and by the position error, but it works from zero speed (frequency).
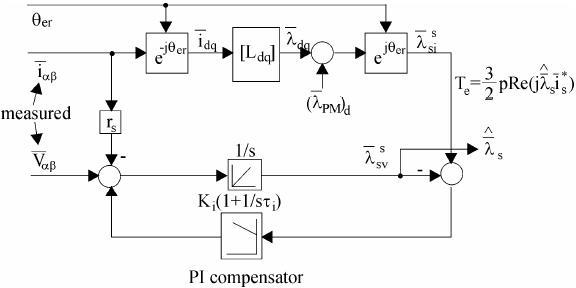
A combination of the two with a PI compensator is designed such that the current model is predominant at low speeds, while the voltage model takes over at high speeds (Figure 11.45).
The PI compensator provides for this discrimination. The frequency band for the transition is provided by an adequate choice of Ki and тi based on the given observer poles w1 and w2, real and negative
Figure 11.45. Voltage and current stator flux observer
Typical values of w1 and w2 are w1= -(3-10) rad/s, w2= -(3-10)|w1|.
The torque is calculated easily from flux and current (Figure 11.45). Providing for low and high speed good performance, DTFC is a strong contender for vector voltage and current
control as it is simpler and more robust.

![]()
![]() is
is![]()
![]()