• бесконтактные двигатели постоянного тока, в которых фазные ЭДС вращения имеют трапецеидальную форму;
• бесконтактные двигатели переменного тока, где фазные ЭДС вращения имеют синусоидальную форму.
Последний вид СДПМ используют для построения систем векторного управления моментом и скоростью, которое позволяет
обеспечить высокое качество характеристик ЭП как в статике, так и в динамике, так как при этом организуется раздельное
регулирование электромагнитных и механических величин. Довольно часто к системам управления СДПМ предъявляются
повышенные требования по ряду показателей, а именно:
• расширение диапазона регулирования скорости (двухзонное регулирование скорости);
• точность и динамика регулирования электромагнитного момента;
• переход к бездатчиковому регулированию и др.
При этом, кроме настройки регулирующей части системы, могут возникать следующие частные задачи:
1) идентификация потокосцепления статора;
2) вычисление электромагнитного момента;
3) идентификация скорости;
4) определение начального углового положения ротора.
В статье приводятся отдельные результаты, полученные при исследовании системы векторного управления СДПМ с решением перечисленных задач.
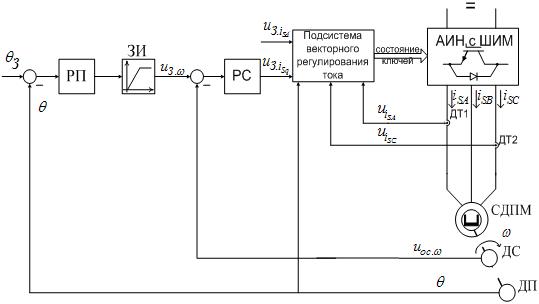
Обобщённая схема системы векторного управления моментом, скоростью и положением ротора СДПМ приведена на рис.1.
На схеме обозначено: АИН с ШИМ – автономный инвертор напряжения с широтно-импульсной модуляцией, РП – регулятор положения,
ЗИ – задатчик интенсивности, РС – регулятор скорости, ДС – датчик скорости, ДП – датчик положения. Рисунок 1 – Обобщённая функциональная схема системы векторного управления СДПМ
Чем качественней выполнена подсистема векторного регулирования тока, тем более качественную систему можно построить.
В настоящее время таких способов два: ПИ-регулирование тока во вращающейся системе координат, релейное регулирование тока в фазных координатах.
В основе алгоритма регулирования и идентификации отдельных координат лежит математическое описание процессов в СДПМ.
Уравнения СДПМ в системе координат d-q, вращающейся синхронно с ротором, имеют вид:
На основе полученных уравнений составляется структурная схема СДПМ и затем выполняется расчёт параметров регуляторов системы.
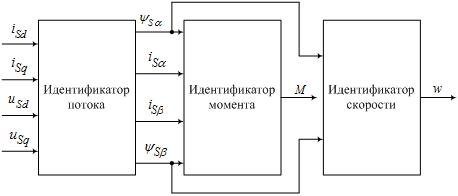
Для текущего определения координат ЭП в простейшем случае может быть использован идентификатор, представленный на рис. 2,
который содержит в себе замкнутый идентификатор потока с ПИ-коррекцией, а также идентификаторы момента и скорости,
построенные в соответствии с выражениями:
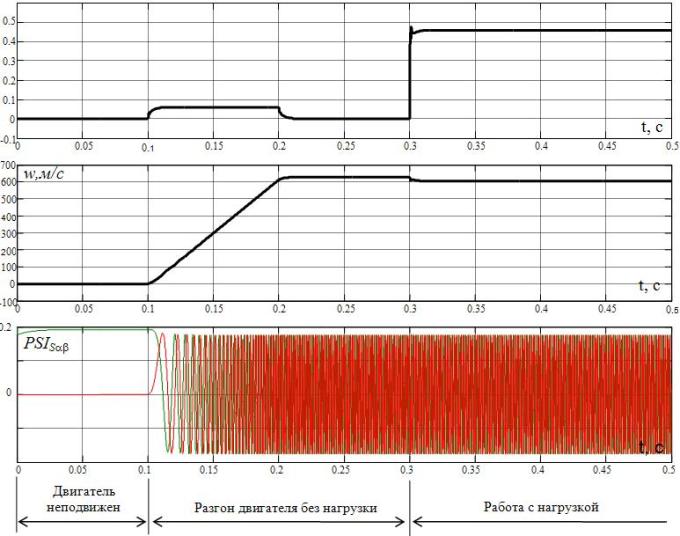
Проведенные исследования методом математического моделирования (рис. 3) показали, что идентификатор координат обеспечивает достаточную
точность. Восстановленные сигналы могут в общем случае быть использованы для организации регулирования при отказе от использования
механических датчиков на валу СДПМ, а также для совершенствования алгоритма управления. Рисунок 2 – Структурная схема идентификатора координат Рисунок 3 – Идентификация координат электропривода при работе системы векторного управления СДПМ
Для обеспечения надёжного, плавного пуска необходимы специальные способы идентификации начального положения. Одним из способов является подача на
двигатель коротких сигналов вектора напряжения статора до тех пор, пока фазные токи не достигнут определённого уровня. Начальное положение ротора находится
из анализа зависимости «индуктивность–положение» или значений МДС.


Литература: