
Актуальність
В даний час мається необхідність у забезпеченні експлуатаційної надійності електромеханічного устаткування, у перевірці і визначенні його стану без здійснення демонтажу, у прогнозуванні технічного стану і забезпечення безпеки функціонування.
Здійснення безрозбірної перевірки засновано на застосуванні виброакустических методах діагностування, тепловій діагностиці, діагностиці по електричних величинах електропривода.
У даному напрямку методи виброакустической діагностики досягли найбільшого розвитку.
Особливістю нашої роботи є вивчення взаємовпливу між електромеханічним перетворювачем і навантаженням, що приводиться, і пошук можливості витягати діагностичні ознаки з електричних величин механізму (електричний струм, напруга, потужність).
Вітчизняний і закордонний досвід показує, що введення засобів діагностування є економічно виправданим. Відомо, що вчасно виконані ремонтні роботи зменшують можливість виробничих травм, кількість раптових відмовлень устаткування, що відповідно зменшує час зупинки виробничих ліній.
Ціль роботи
Побудова лабораторного стенда імітації роботи ШПУ на базі синхронного електропривода.
Джерела [1,2,3,4] присвячені загальним питанням електропривода.
У матеріалі [1,2,4] розглянуті типові електромеханічні системи для ШПУ.
У джерелі [3] описані машини перемінного струму, на основі цієї книги був зроблений вибір двигуна для лабораторної установки.
У матеріалі [8] дані описи найбільш розповсюджених дефектів устаткування - приведені спектрограми вибропараметров, що спостерігаються при тих чи інших несправностях, описані їхні відмінні риси.
У [9] автором розглянуті питання поліпшення й оптимізації технічного стану устаткування розмеленого відділення млина шляхом розробки і впровадження методів і засобів функціональної вибродиагностики. Проведено теоретичні й експериментальні дослідження. Дано посилання на умови проведення поставлених експериментів. Розглянуто частотні математичні моделі наступних дефектів: "неврівноваженість ротора энтолейтора", дефект вальцевого верстата "недостатнє зусилля запобіжної пружини" і ін. Приведено статистичні дані впливи способу установки вибродатчика на значення різних параметрів вібрації.
Об'єкт, що спостерігається, може знаходитися в одному з наступних станів [7]:
- неушкоджений, тобто стан, об'єкт, що коли спостерігається, відповідає усім вимогам визначеним нормативно-технічною документацією;
- працездатність, тобто стан, коли об'єкт здатний виконувати задані функції в межах, що визначені нормативно-технічною документацією;
- правильність функціонування, тобто стан, коли об'єкт виконує в сучасний момент часу запропоновані алгоритми функціонування (відомо тільки, що об'єкт правильно функціонує в заданому режимі роботи в даний момент часу);
- аварійна ситуація об'єкта, коли його наступне функціонування не можливе в результаті відходу його параметрів за припустимі межі.
Серед діагностуємих несправностей розрізняють наступні [8]:
- "електромагнітні" несправності:
- ослаблення прессовки пакета стали;
- чи обрив коротке замикання в обмотках;
- ексцентриситет, эллипсоидность внутрішнього розточення статора щодо осі обертання статора;
- неправильний взаємний монтаж пакетів статора і ротора;
- ексцентриситет зовнішньої поверхні ротора щодо його осі обертання;
- чи обрив утрата контакту в стрижнях чи обмотки короткозамыкающих кільцях ротора з білячою кліткою асинхронного електродвигуна;
- ослаблення прессовки всього пакета чи стали тільки в районі зубців;
- дисбаланс мас ротора;
- расцентровка валів;
- механічне ослаблення;
- зачіпання елементів;
- проблеми підшипників ковзання;
- проблеми підшипників качения;
- дефекти редукторів і мультиплікаторів;
- дефекти муфт.
Синтез системи векторного керування синхронним двигуном при
підтримці струму іd=0
Як випливає з математичної моделі синхронного двигуна в системі координат d,q ротора (відповідна структурна схема показана на рис. 1), одним з ефективних способів глибокого регулювання швидкості є можливість підтримки системою регулювання значення струму іd=0 , тоді електромагнітний момент синхронного двигуна буде залежати тільки від струму статора по осі іq і потокосцепления ψd . У результаті експериментів на математичній моделі встановлено, що потокосцепление ψq практично не змінюється у всіх режимах роботи приводу: у сталому і перехідних (розгін, гальмування, наброс і скидання навантаження) воно близько до нуля. Тобто можна прийняти допущення, що ψq = const ≈0. Потокосцепления ψd не дорівнює нулю, вона також слабко змінюється, тобто ψd = const ≠ 0. Таким чином, контури регулювання замикаються тільки по струмах, значення яких безпосередньо виміряються. Величини потокосцеплений використовуються для компенсації перехресних зв'язків, вони можуть бути оцінені за допомогою самонастроювальних математичних чи моделей же обмірювані безпосередньо.
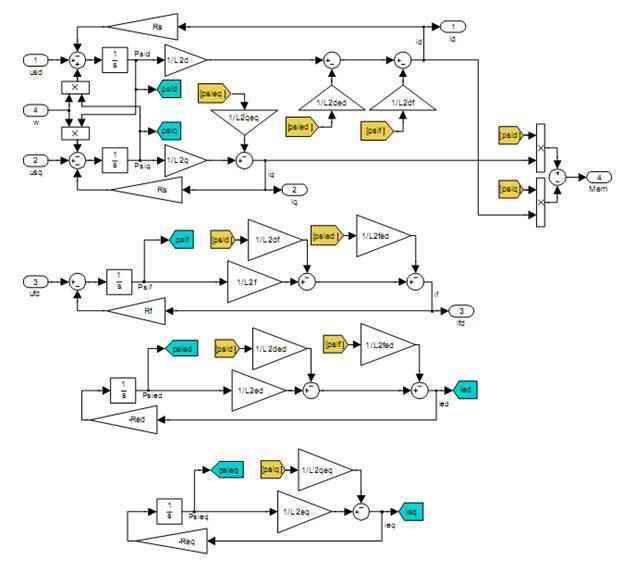
Рисунок 1 - Застосовувана структурна схема синхронного двигуна
Нижче приведений синтез регуляторів системи підлеглого регулювання швидкості.
Синтез регуляторів струму
Контур регулювання струму іd синтезуємо в припущенні, що перехресні зв'язки в об'єкті регулювання відповідним чином скомпенсовані. Структурна схема контуру регулювання струму (КРС) приведена на рис. 2:
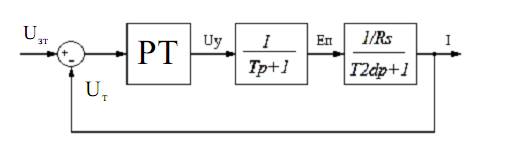
Рисунок 2- Структурна схема контуру регулювання струму іd
Контур регулювання струму, містить одну большую T2d=x2d/Rs і одну малу T постійну часу. Будемо вважати, що T = Tµ - мала некомпенсована постійна часу.
Статична помилка по керуючому впливі як реакція на стрибок системи з астатизмом першого порядку дорівнює нулю. Щоб система стала астатической першого порядку, виберемо регулятор струму пропорційно-інтегрального типу (ПІ), компенсуючи велику постійну часу T2d . Передатна функція обраного ПІ регулятора струму:
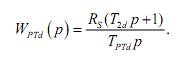
Набудовуючи систему на технічний оптимум, приймаємо постійну часу регулятора струму, рівної TPTd=2Tµ. Аналогічним образом виробляється синтез регуляторів струмів іq і іf. Їхні передатні функції будуть мати наступний вид:
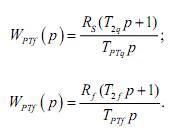
Настроювання регуляторів струмів іq і іf на технічний оптимум: TPTd=2Tµ, TPTf=2Tµ.
Синтез регулятора швидкості
Розрахункова
структурна схема контуру регулювання швидкості приведена на рис. 3, нижче.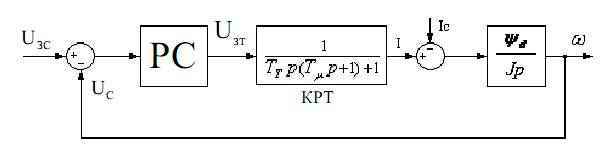
Рисунок 3 – Структурна схема контуру регулювання швидкості
Для забезпечення астатизму системи керування по керуючому впливі і по навантаженню, приймаємо однократно інтегруючу систему підлеглого регулювання швидкості, для цього вибираємо регулятор швидкості типу ПІ, передатна функція якого
отримана в припущенні, що в сталому режимі значення потокосцепления ψd=const. Набудовуючи регулятор швидкості на симетричний оптимум, приймаємо значення коефіцієнтів: a=8 , TШ = 4Tµ.
Моделювання задатчика інтенсивності
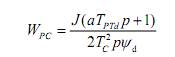
Задатчик інтенсивності (ЗІ) необхідний для формування бажаного закону зміни регульованої величини, а зокрема - швидкості. У розглянутому випадку задатчик повинен, крім забезпеченн задан темп змін швидкіст, ма можливіст обмежува величин ривок. Структурна схема ЗІ з обмеженням ривка приведена на рис. 4.
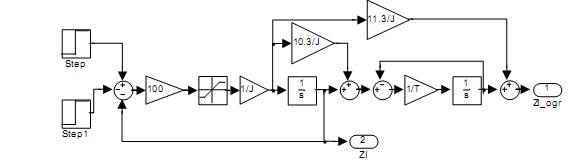
Рисунок 4 – Структурна схема задатчика інтенсивності з обмеженням ривка
Структурна схема системи ПЧ-СД із підтримкою іd= 0 приведена на рис. 5.Графіки перехідних процесів рис. 6 - 15 відображають зміну в часі основних величин при роботі розглянутої системи керування синхронним двигуном. Розглянуто відпрацьовування трапецеидальной тахограммы руху з наступним переходом на знижену швидкість. Наброс навантаження на сталій частоті обертання зроблений для оцінки якості перехідних процесів при відпрацьовуванні системою керування токого виду впливу. З мал. 6 видно, що система є астатической по навантаженню. Також, система керування астатична по керуючому впливі нульового порядку, помилка відпрацьовування завдання в цьому випадку дорівнює нулю і стале значення частоти обертання дорівнює заданому. Крім того, вона стійка, тому що у всіх розглянутих режимах роботи (розгін, гальмування, наброс навантаження) не спостерігається виникнення автоколебаний. Як раніше, апріорі, передбачалося, потокосцепление Ψq ≈0 протягом усього циклу роботи (рис. 11), а величина потокосцепления Ψd у сталих режимах тримається на постійному рівні, у перехідних режимах істотно не міняється.
Рисунок 5 – Структурна схема системи ПЧ-СД із підтримкою id=0
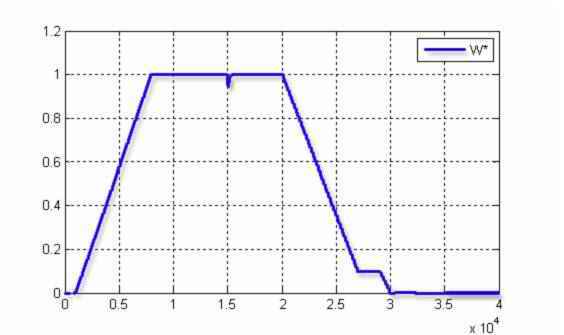
Рисунок 6 - Графік залежності частоти обертання від часу ω *(t) при відпрацьовуванні
системою ПЧ-СД трапецеидальной тахограммы руху з підтримкою id=0
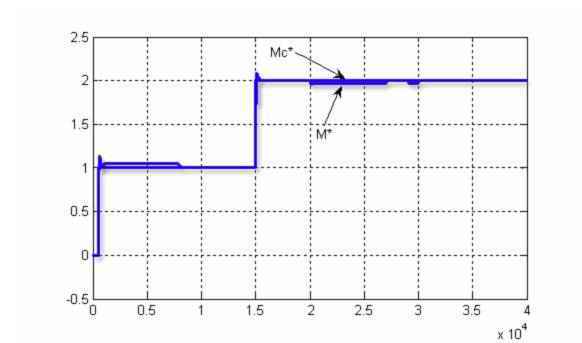
Рисунок 7 – Графік залежності електромагнітного моменту від часу М*(t) при
відпрацьовуванні системою ПЧ-СД трапецеидальной тахограммы руху з підтримкою id=0
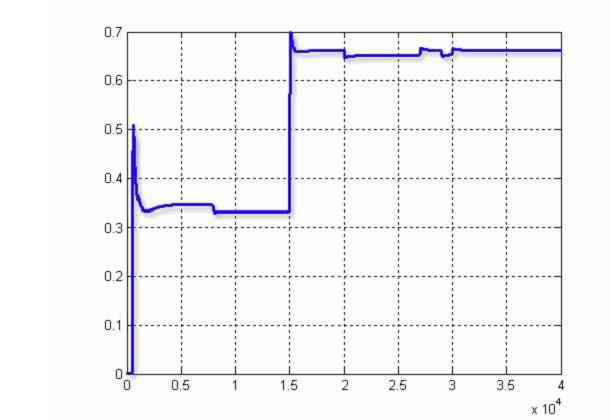
Рисунок 8 – Графік залежності струму статора від часу іs*(t) при відпрацьовуванні системою ПЧ-СД трапецеидальной тахограммы руху з підтримкою id=0
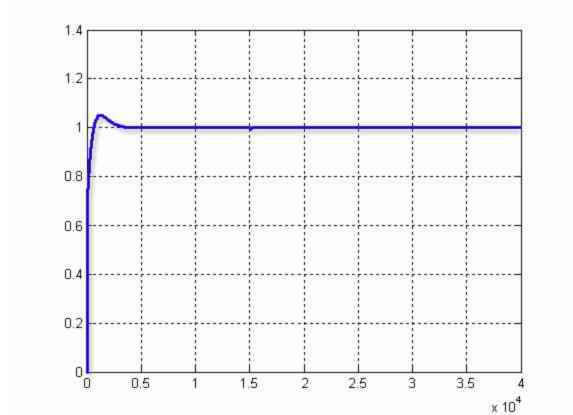
Рисунок 9 – Графік залежності струму порушення від часу іf*(t) при відпрацьовуванні системою ПЧ-СД трапецеидальной тахограммы руху з підтримкою id=0
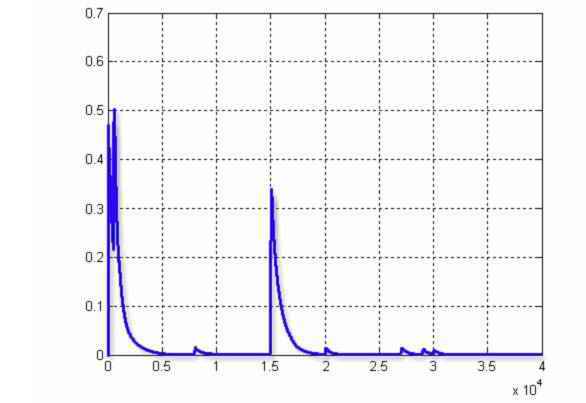
Рисунок 10 - Графік залежності струму демпферної обмотки від часу іe*(t) при відпрацьовуванні системою ПЧ-СД трапецеидальной тахограммы руху з підтримкою id=0
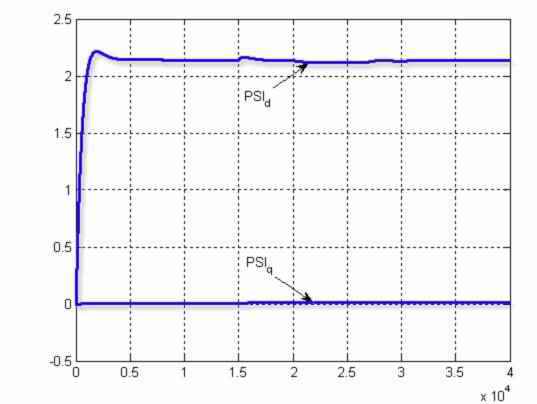
Рисунок 11 - Графік залежності потокосцепления статора від часу Ψs *(t) при відпрацьовуванні системою ПЧ-СД трапецеидальной тахограммы руху з підтримкою id=0
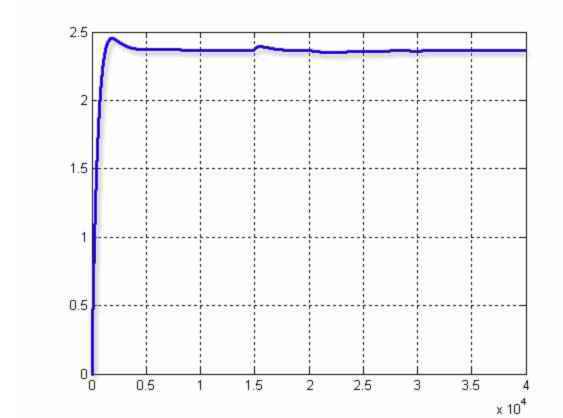
Рисунок 12 – Графік залежності потокосцепления обмотки збудження Ψf*(t) при відпрацьовуванні системою ПЧ-СД трапецеидальной тахограммы руху з підтримкою id=0
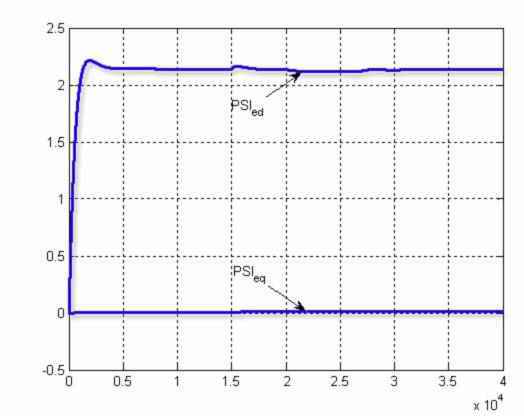
Рисунок 13 – Графік залежності потокосцепления демпферної обмотки Ψe*(t) при відпрацьовуванні системою ПЧ-СД трапецеидальной тахограммы руху з підтримкою id=0
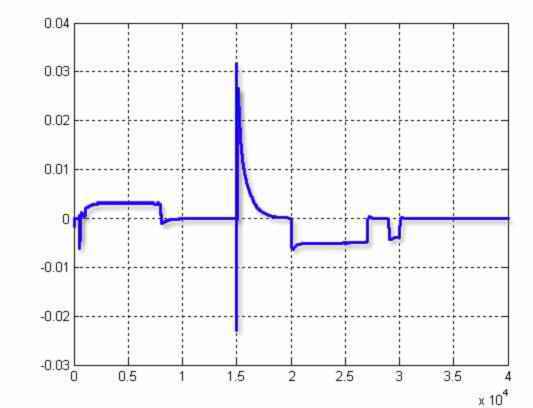
Рисунок 14 – Графік залежності струму статора від часу іd*(t) при відпрацьовуванні системою ПЧ-СД трапецеидальной тахограммы руху з підтримкою id=0
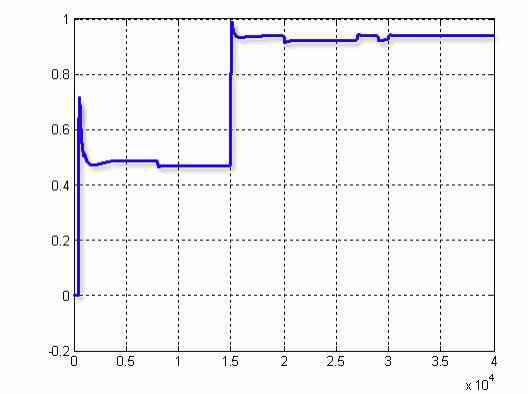
Рисунок 15 – Графік залежності струму статора від часу іq*(t) при відпрацьовуванні системою ПЧ-СД трапецеидальной тахограммы руху з підтримкою id=0
Пряме керування моментом (DTC)
Пряме керування моментом полягає в тому, щоб регулювати амплітуду і фазу вектора, що представляє потоки статора. Працюють, щоб здійснити це у відправних координатах Парку, зв'язаних з обмотками статора, тобто репер dq (координати d-q) визначається ξs=0, що збігається з репером αβ статора. Отже, щоб відповідати
![]()
повинна бути рівність
![]()
З виразів
можна виразити Isdq і Irdq
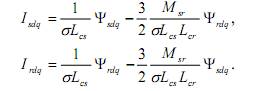
Підставляючи два останніх вираження в рівняння електромагнітного моменту
![]()
можна виразити момент через потоки статора і ротора

де ρs и ρr – відповідно кути між векторами Ψsdq і Ψrdq і заданою віссю статора,рис.16.
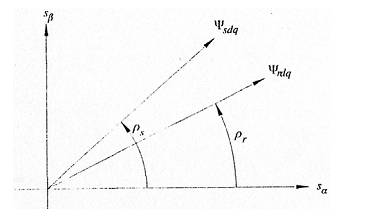
Рисунок 16 – Статорные и роторные потоки
Постійна часу ротора Tr, що визначає зміну роторних потоків, у багато разів перевищує останню σLcs/Rs для статорних потоків.
Використовуючи рівняння електричної рівноваги для статора Usdq і вираження для Іsdq, можна показати рівняння трансформації статорних потоків:

Отже, можна розглядати касательно масштабу часу керування, що роторний потік є практично постійним по напрямку й амплітуді і що момент може регулюватися впливом на потік статора.
Пряме
керування моментом полягає в тім, щоб підтримати рівень (норму) статорного
потоку квазипостоянным і його утримувати в межах між ![]() і
і ![]() ;
регулювати момент, впливом на кут ρs,
убік його підвищення, якщо різниця
;
регулювати момент, впливом на кут ρs,
убік його підвищення, якщо різниця ![]() зменшується і, навпаки, знижувати його
(момент) у випадку збільшення
зменшується і, навпаки, знижувати його
(момент) у випадку збільшення![]() .
.
Відповідні сигнали керування генеруються від гістерезисних компараторів
Регулювання напруг, що будуть прикладені до машини, може здійснюватися, розглядаючи, що інвертор напруги може підтримати в плані sα , sβ тільки сім векторів різних напруг у функції конфігурації рерывателей силовойэлектроники, що його складають, рис. 17-18.
Рисунок 17 – Положення ключів для забезпечення заданих рівнів напруг
(Анімація, 8 кадрів, 5 повторів, розмір 12,1 кВ)
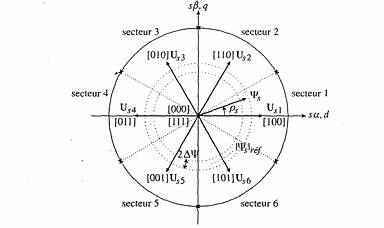
Рисунок 18 – Напруги на інверторі напруги
Розрізняють ще шість секторів. Якщо, як на прикладі, представленому на рис. 18, вектор Ψsdq розташовується в секторі 1, і сигнали керування индицируют, що його фаза ρs повинна зростати (щоб збільшувати величину моменту), буде прикладено, допустимо, напруга Us2 чи Us3 згідно тому, що потрібно з нагоди, - чи збільшити зменшити величину амплітуди Ψ sdq.
Простим способом, якщо бажають збільшити фазу ρs , прикладуть взаємно Us6 чи Us5 згідно тому, що амплітуда Ψ sdq повинна буде чи зростати або знизиться.
Таблиця 1 дає у функції вихідних сигналів керування гістерезисних компараторів і сектора, де знаходиться Ψ sdq, різні вектори напруг, що будуть прикладені (до двигуна).
Таблиця 1 - Напруги, що прикладаються до затисків двигуна

Оцінка величини Ψ sdq може реалізовуватися простим інтегруванням напруг, що прикладаються до двигуна, з урахуванням омічних падінь напруги:

Останнє можливо
тому, що репери αβ статора і dq
ротора збігаються при ![]()
Знаючи амплітуду і фазу Ψ sdq можна легко визначити момент, що розвивається машиною. Виражаючи І rdq у функції Ψ sdq і I sdq і з огляду на вираження для моменту , покажемо, що
![]()
Пряме керування моментом представляє перевагу, що дозволяє одержати підвищені динамічні характеристики без необхідності, на противагу векторному керуванню, ускладнених розрахунків потужності, чи виміру точній оцінці частоти обертання ротора. З оцінки статорного потоку шляхом інтегрування сумарних величин, випливає, що регулювання, усякий раз, дуже відчутно до помилок вимірів. Крім того, керування, реалізоване від гістерезисних компараторів, веде до роботи з перемінною частотою інвертора напруги, що харчує двигун.
Ортогональні вейвлети і багатомаштабний аналіз
Вейвлет-перетворення природньо виникає в контексті багатомасштабного аналізу (multіresolutіon analysіs), МА. МА - це математична конструкція, що синтезує дві ідеї обробки сигналів. Перша ідея - розкладання сигналу по поддиапазонам (subband decomposіtіon) за допомогою квадратурних дзеркальних фільтрів (quadrature mіrror fіlters) - з'явилася в задачі стиску мови. Друга ідея - пірамідне представлення (pyramіd representatіon) - у задачі стиску зображень. Обидві ідеї зв'язані з застосуванням до сигналу фільтрів спеціального виду. У першому випадку теорія будувалася в термінах Фур'є-перетворення сигналу, у другому - у термінах вихідного сигналу.
Розглянемо
сигнал - послідовність чисел x=![]() . Для згладжування сигналу, придушення шуму й
інших цілей часто використовують фільтри - перетворення згортки виду:
. Для згладжування сигналу, придушення шуму й
інших цілей часто використовують фільтри - перетворення згортки виду:
![]() .
.
Сигнал y=![]() виходить "локальним
усередненням" сигналу x за допомогою набору "ваг"
виходить "локальним
усередненням" сигналу x за допомогою набору "ваг" ![]() :
:
Надалі нам знадобляться
наступні поняття.
- Дискретне перетворення Фур'є (ДПФ) сигнала:
 (формальна сумма).
(формальна сумма). - z- перетворення сигналу:
 (формальна сумма).
(формальна сумма).
- Перетворення Фур'є функції
 має виглфд
має виглфд  .
.
У цих термінах застосування фільтра записується так:
![]() ,(1.1)
,(1.1)
або
![]() (1.1')
(1.1')
(якщо сигнал кінцевий, його звичайно доопределяют
періодичним образом для всіх цілих значень індексу).
- Транспонований фільтр
 складається з
тих же коефіцієнтів, що і фільтр
складається з
тих же коефіцієнтів, що і фільтр  , переставлених у зворотному порядку. У
Фур'є-області транспонований фільтр має вид
, переставлених у зворотному порядку. У
Фур'є-області транспонований фільтр має вид  . Коефіцієнти всіх сигналів і фільтрів
будуть передбачатися речовинними.
. Коефіцієнти всіх сигналів і фільтрів
будуть передбачатися речовинними.
Розкладання по діапазонах ![]()
![]()
![]() характеризує розподіл
"енергії" сигналу по частотах
характеризує розподіл
"енергії" сигналу по частотах ![]() . Іноді буває корисно розкласти сигнал на
компоненти, енергія яких зосереджена в різних частотних поддиапазонах (тобто
істотно відмінна від нуля на різних подотрезках відрізка
. Іноді буває корисно розкласти сигнал на
компоненти, енергія яких зосереджена в різних частотних поддиапазонах (тобто
істотно відмінна від нуля на різних подотрезках відрізка ![]() ), і кодувати їх з різним ступенем
детальності (наприклад, у залежності від чутливості людського вуха до звуків
різної частоти). Задовго до створення вейвлет-анализа для цього
використовувалася схема, що ми зараз опишемо.
), і кодувати їх з різним ступенем
детальності (наприклад, у залежності від чутливості людського вуха до звуків
різної частоти). Задовго до створення вейвлет-анализа для цього
використовувалася схема, що ми зараз опишемо.
Ми хочемо
знайти два фільтри, h (гнітючий високі частоти) і g (гнітючий низькі частоти),
що дозволяли б розкласти сигнал на два компоненти, ![]() та и
та и ![]() , удвічі їх прорідити (половина значень стає
зайвою - адже частотний діапазон скоротився вдвічі!), а потім, за допомогою
транспонованих фільтрів, точно відновити по цим даним вихідний сигнал (цю
операцію можна застосовувати рекурсивно). Умови на шукані фільтри зручно
записати в термінах z-перетворення.
, удвічі їх прорідити (половина значень стає
зайвою - адже частотний діапазон скоротився вдвічі!), а потім, за допомогою
транспонованих фільтрів, точно відновити по цим даним вихідний сигнал (цю
операцію можна застосовувати рекурсивно). Умови на шукані фільтри зручно
записати в термінах z-перетворення.
Нехай ![]() – z-перетворення однієї з
компонентів. Перед кодуванням вона проріджується вдвічі, а перед відновленням
вихідного сигналу доводиться до вихідної довжини вставкою нулів між сусідніми
значеннями. При цьому z-перетворення з
– z-перетворення однієї з
компонентів. Перед кодуванням вона проріджується вдвічі, а перед відновленням
вихідного сигналу доводиться до вихідної довжини вставкою нулів між сусідніми
значеннями. При цьому z-перетворення з ![]() перетворюється в
перетворюється в ![]() . Підставимо сюди (1.1') для кожного з фільтрів,
і одержимо z-перетворення компонентів перед відновленням
. Підставимо сюди (1.1') для кожного з фільтрів,
і одержимо z-перетворення компонентів перед відновленням
![]()
z-перетворення транспонованих
фільтрів мають вид ![]() і
і ![]() .
Сигнал відновиться з їхньою допомогою точно, якщо:
.
Сигнал відновиться з їхньою допомогою точно, якщо:
![]() .
.
Одержуємо умови точного відновлення (perfect reconstruction, PR):
![]()
У матричній формі вони записуються так: ![]()
![]() ,
,
де
![]()
Підставивши ![]() , одержимо умови на ДПФ шуканих фільтрів:
, одержимо умови на ДПФ шуканих фільтрів:
 (1.2)
(1.2) 
Допустимо, що ми знайшли h такий, що
![]() (1.2’)
(1.2’)
Тоді, поклавши
![]() , (1.3)
, (1.3)
ми бачимо, що (1.2)
виконується. Задача звелася до перебування тригонометричного багаточлена ![]() , задовольняючого (1.2'). На
методах побудови таких багаточленів ми зупинимося в наступній лекції. Фільтри h
і g, що задовольняють (1.2), називаються квадратурними дзеркальними фільтрами (quadrature
mirror filters, QMF).
, задовольняючого (1.2'). На
методах побудови таких багаточленів ми зупинимося в наступній лекції. Фільтри h
і g, що задовольняють (1.2), називаються квадратурними дзеркальними фільтрами (quadrature
mirror filters, QMF).
На рис.17, (a) и (b), показані ДПФ такої пари фільтрів h і g, а також вихідний сигнал до і після фільтрації (без проріджування).
Рисунок 17a.
Рисунок 17b.
Точно таку ж операцію можна застосувати до одній чи обом з отриманих компонентів, і т.д., домагаючись потрібної локалізації по частоті. Це дозволяє адаптуватися до особливостей сигналу за рахунок вибору придатного "дерева розкладання". Воно може виглядати, наприклад, так:
Рисунок 18 - “ Дерево розкладання ”
Перелік використаної літератури
1. Чиликин М.Г., Сандлер А.С. Общий курс электропривода. - М.: Энергоиздат, 1981. - 576 с.
2. Ключев В.И. Теория электропривода. - М.: Энергоатомиздат,1985-560с.
3. Костенко М.П., Пиотровский Л.М. Электрические машины. В 2-х ч. Ч.2. – Машины переменного тока. Ученик для студентов высш. техн. учеб. заведений. Изд. 3-е, перераб. Л., «Энергия», 1973., 648с.
4. Башарин А. В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: Учебное пособие для вузов. – Л.: Энергоиздат. Ленингр. отд-ние, 1982. – 392с., ил.
5. Моделювання електромеханічних систем: Підручник / Чорний О.П., Луговой А.В., Родькін Д.Й., Сисюк Г.Ю., Садовой О.В. – Кременчук, 2001. – 376с.
6. Daubechies I. Ten Lectures on Wavelets. SIAM, 1992.
7. "Виброакустическая диагностика зарождающихся дефектов"/Балицкий Ф.Я., Иванова М.А., Соколова А.Г., Хомяков Е.И.. М.: Наука, 1984
8. Русов В.А. "Спектральная вибродиагностика" 1996 г. http://www.vibrocenter.ru/book.htm
9. Яблоков А.Е. Автореферат на соискание учёной степени кандидата технических наук. «Вибродиагностика основного технологического оборудования размольного отделения мельницы». М.: Издательский комплекс МГУПП, 2001 г.
10. Трибология. Физические основы, механика и технические приложения. Учебник для вузов/ Беркович И.И., Громаковский Д.Г.; Под ред. Громаковского Д.Г.; Самар. гос. техн. ун-т. Самара, 2000. 268 с.
При написанні даного автореферату магістрська робота не закінчена. Остаточний варіант роботи можна отримати у автора або наукового керівника після грудня 2010.