УДК 622.232.32
МОДЕЛИРОВАНИЕ СТРУКТУРНЫХ СХЕМ ГИДРОУДАРНЫХ МЕХАНИЗМОВ С ПОМОЩЬЮ ПРОГРАММЫ FluidSimH
Пакин Д.И., Трофимова Ю.А. ст. гр. ЭМК-05, руководитель Устименко Т.А.
Донецкий национальный технический университет
Механика жидкости и газа / Материалы VII Международной научно-технической студенческой конференции. - Донецк: ДонНТУ, 2008.- С.151-154.Исследован метод моделирования структурных схем гидроударных механизмов с помощью программы FluidSimH.
Рассмотрим возможности программы FluidSimH для моделирования различных структурных схем гидроударных механизмов. Данный подход позволит, во-первых, проверить работоспособность выбранной схемы, во-вторых, осуществить выбор основных рабочих и конструктивных параметров, в-третьих, визуально с помощью диаграмм состояния проанализировать эффективность рабочего процесса каждой из рассматриваемых схем. Для моделирования структуры нам необходимо ввести следующие основные элементы: узел ударника (моделируется с помощью гидроцилиндра), элемент устройства управления (имитируется гидравлическим распределителем), элемент клапана запуска (с помощью распределителя с ручным управлением).
Так как переключение устройства управления наступает в момент нанесения удара бойком по рабочему инструменту, то, не анализируя возможную конструкцию устройства управления, его условно можно заменить распределителем с электрическим управлением. Это означает, что при движении поршня-бойка в его крайних положениях срабатывают датчики положения, которые генерируют электрический сигнал управления для распределителя, перемещение поршня последнего вызовет перераспределение давлений в рабочих камерах поршня-бойка. Использование электрических сигналов позволит нам смоделировать выработку соответствующих гидравлических сигналов и осуществить структурный синтез различных схем гидроударных механизмов. Дальнейшие конкретные конструкторские решения для каждой из схем позволят заменить электрические сигналы гидравлическими.
Любой гидравлический ударный механизм (ГУМ) в своем составе имеет узел ударника, узел управления и узел запуска, осуществляющий ввод устройства в автоколебательный режим. Конструкция ГУМ существенным образом зависит от выбора структурной схемы, которая может относиться к одному из принципов управления узлом ударника: то ли камерой прямого хода, то ли обратного, то ли двумя поочередно. Все три возможные структурные схемы описываются одной математической моделью:
![]() ,
,
где m – масса поршня-бойка, p1 и p2 – давление жидкости в камерах прямого и обратного хода, соответственно, S1 и S2 – площади рабочих поверхностей поршня-бойка. Давления в зависимости от скорости движения поршня-бойка рассчитываются по формулам:
![]()
![]() .
.
pi,
pj,
Qi,
Qj,
ai,
aj
–
давления, расходы и
гидравлические сопротивления
в соответствующих
линиях при рассмотрении различных структурных схем. Расходы
определяются скоростью движения поршня-бойка:
![]() где
где
![]() или 2. Из этого
следует, что все три схемы могут быть смоделированы набором
стандартных элементов гидропривода.
или 2. Из этого
следует, что все три схемы могут быть смоделированы набором
стандартных элементов гидропривода.
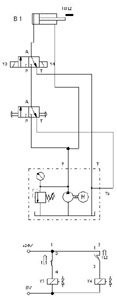
На рис.1 приведены структурные схемы, составленные в программном комплексе FluidSimH. В каждой из двух приведенных структурных схем имеется узел ударника (соответственно, А1, В1) с датчиками положения L1 и L2, распределитель с катушками Y, который управляет бойком путем реагирования на сигналы, получаемые от датчиков. Пунктирной линией на схеме обведены элементы насосной станции, которая включает насос, снабженный предохранительным клапаном и манометром. Питание от насоса подается на распределитель с ручным управлением, который во всех двух схемах является устройством запуска механизма в автоколебательный режим работы. Под каждой гидравлической схемой находится соответствующая ей электрическая схема в виде источника питания, концевых выключателей, относящихся к датчикам положения поршня-бойка, и электромагнитных переключателей гидравлических распределителей устройства управления. При срабатывании датчика положения поршня-бойка, соответствующий выключатель замыкается и таким образом вырабатывается сигнал на переключение распределителя.
Система проектирования FluidSimH позволяет не только составлять схемы, но и выбирать параметры и моделировать работу в реальном масштабе времени. Запустив режим моделирования в программе и «нажав» на кнопку пускового распределителя, каждая из схем входит в автоколебательный режим и на диаграмме состояния можно наблюдать состояние всех интересующих нас параметров рабочего процесса системы (положения поршня, его скорость, ускорение, давления в указанных точках).
Как видно из рис.1, несмотря на схожесть схем по используемым элементам, все они имеют некоторые различия, которые необходимо предусмотреть при разработке соответствующих конструкций. Так, для стабильной работы схемы А необходимо предусмотреть дроссель перед камерой прямого хода, чтобы обеспечить гарантированный взвод поршня-бойка. Данный дроссель может быть конструктивно совмещен с узлом ударника.
На рис.2 представлены осциллограммы скоростей поршня-бойка для каждой из рассматриваемых схем, так как предударная скорость является одним из основных показателей качества рабочего процесса ударного механизма. Установлено, что разгон бойка длится 0,02-0,05 с, а основная часть времени приходится на его обратный (холостой) ход, поэтому регулирование частоты ударов в большей мере зависит от изменения длительности холостого хода, которая регулирует подачу насоса. Сравнив графики, можно сделать вывод, что при равных условиях на выбранном наборе параметров, соответствующих ручным машинам малой массы (до 9 кг), структурную схему с управляемой камерой обратного хода можно считать наиболее перспективной, как обеспечивающую наибольшую предударную скорость.

А) В)
Рис.1.Структурные схемы гидравлических ударных механизмов:
А) С управляемой камерой обратного хода;
В) С управляемой камерой прямого хода.
А) В)
Рис.2. Диаграмм состояний скорости и положения штока
Полученные результаты показали один из современных способов визуального моделирования гидравлических устройств ударного действия. Несмотря на то, что механизмы такого типа требуют последующей существенной конструкторской доработки, данный подход к исследованию весьма эффективен, так как дает возможность проверить работоспособность схемы, выбрать основные параметры гидроударных механизмов различных типоразмеров, что необходимо для дальнейших исследований и разработок. Так как предлагаемый метод весьма нагляден, то он может использоваться и в учебном процессе для демонстрации принципа действия гидравлических машин ударного действия.
Список источников.
Соколинский Б.В. Машины ударного разрушения (Основы комплексного проектирования).-М.:машиностроение,1982.-184с.
гидропневмоударные системы исполнительных органов горных и строительно-дорожных машин/А.С.Сагинов, А.Ф.Кичигин, А.Г.Лазуткин, И.А. Янцен.-М.:Машиностроение,1980.-299с.
Электрогидроавтоматика/Д.Меркле, К.Рупп, Д.Шольц.-Киев:Изд-во ДП «Фесто»,2003г.-195с.