УДК 621.82.522
ДОСЛІДЖЕННЯ гідравлічних ГАЛЬМІВНИХ ПРИСТРОЇВ за допомогою математичної моделі
Якімчук М.В., канд.техн.наук , ДП «Фесто-Україна», м.Київ, Устименко Т.О., канд.техн.наук, Донецький національний технічний університет
Научные труды Донецкого национального технического университета. Серия «Горно-электромеханическая». Выпуск 16(142). - Донецк:ДонНТУ, 2008.- С.288-293 (специальное издание)
Досліджена одна із схем гідравлічних гальмівних пристроїв, розроблена математична модель для визначення сил опору, за допомогою котрої була побудована діаграма робочого процесу, що наочно демонструє сили гідравлічного опору.
One of the hydraulic brake schemes was researched, mathematical model was created, resistance force was determined and was shown by work diagram.
Проблема та її зв’язок з науковими та практичними задачами. Серед різноманіття проблем регулювання швидкості руху вихідної ланки пневмопривода важливе місце займають проблеми його гальмування і позиціювання. При гальмуванні відбувається перетворення накопиченої в процесі розгону мас, що рухаються, кінетичної енергії в інші оборотні або необоротні види енергії (потенційну, теплову). Використовувані для цього гальмові пристрої і механізми, у вигляді буферів, демпферів, амортизаторів або просто гальм, створюють додаткову силу або момент опору, спрямовані проти руху і здійснюючу негативну роботу на ділянці гальмування. При цьому накопичена енергія частково або цілком перетвориться (поглинається або розсіюється), поступово знижується швидкість мас, що рухаються, у міру їхнього наближення до заданої точки зупинки, усуваються їхні динамічні навантаження й удари, що сприяє усуненню відскоків і коливань робочих органів.
Аналіз досліджень та публікацій. Гальмівні пристрої, які застосовуються для гальмування робочих органів і ланок машин із пневмоприводами, досить різноманітні [1],[2],[3]. Так в залежності від природи сил гальмування розрізняють механічні, гідравлічні, пневматичні, електричні і комбіновані пристрої. Найбільш вживаними є гідравлічні. Вони являють собою пристрої дросельного регулювання .
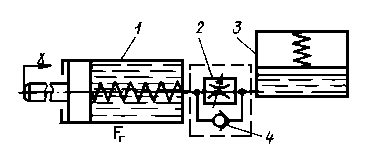
Мал.1 Принципова схема гідравлічного гальма одностороннього типу
Дані пристрої (мал.1) складаються з гідроциліндра 1 (з поршнем і одно- або двостороннім штоком), заповненого рідиною. При переміщенні штока уздовж осі х поршень витісняє рідину з робочої порожнини гідроциліндра через дросельну систему 2 у допоміжну камеру компенсатора 3 . Дросельна система складається з каналів, що містять ділянки (дроселі) із прохідними перетинами, площа яких набагато менше площі поршня. Тому при русі останнього рідина стискується, а швидкість її витоку через канали дроселя значно більша за швидкість самого поршня. За рахунок стискання рідини, збільшується тиск в робочій порожнині утворюючи гідравлічний опір, що спричиняє силу гальмування поршня.
Величина отриманого опору суттєво впливає на роботу механізмів і пристроїв на заключному етапі переміщення. Забезпечити раціональні значення кінематичних та динамічних характеристик руху можливо лише за умови оптимального вибору конструкції та характеристик гальма .
Задача дослідження. Метою роботи є: розробка математичної моделі дослідження сил опору гідравлічних гальмівних пристроїв.
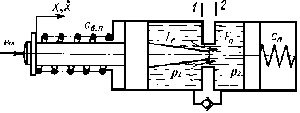
Мал. 2. Розрахункова схема гідравлічного гальмового пристрою
Викладеняя материалу та результати. Розглянемо пристрій, розрахункова схема якого представлена на мал.2
При переміщенні поршня по осі х рідина з робочої порожнини, тиск у якій p1 випливає в компенсаційну порожнину через дросельну щілину площею f(x), утворену отвором у гільзі гідроциліндра і голкою, прикріпленої до поршня.
При аналітичному визначенні сили опору будемо розглядати випадок турбулентного потоку Ньютонівської рідини, нехтуючи при цьому можливими її втрати з робочої порожнини. Основними рівняннями, що описують процеси в гідравлічних гальмових пристроях, є рівняння Бернуллі (описує баланс енергії рідини з урахуванням гідравлічних і інерційних втрат ). Умовно розіб’ємо конструкцію гальма на дві ділянки і запишемо рівняння Бернуллі для кожної ділянки, обмеженого перерізами 1—1 і 2—2 у вигляді
![]() (1)
(1)
додамо рівняння збереження об'ємної витрати
![]() (2)
(2)
де
![]() -
середня швидкість потоку рідни відповідно в перетинах 1—1 і
2—2;
-
середня швидкість потоку рідни відповідно в перетинах 1—1 і
2—2;
![]() - витрати рідини;
- витрати рідини;
![]() -
гідравлічні втрати;
-
гідравлічні втрати;
![]() -
інерційні втрати. Тоді
-
інерційні втрати. Тоді
![]() (3)
(3)
Виразимо
швидкості рідини
![]() ,
у різних перетинах через швидкість поршня
,
у різних перетинах через швидкість поршня
![]() та його площу
та його площу
![]() ,
використовуючи рівняння (2). В результаті одержимо
,
використовуючи рівняння (2). В результаті одержимо
 (4)
(4)
Гідравлічні
втрати
![]() будуть складатися з місцевих втрат, їх можна розрахувати по формулі
будуть складатися з місцевих втрат, їх можна розрахувати по формулі
 (5)
(5)
Інерційні
втрати
![]() ,
приведені до площі
,
приведені до площі
![]() представимо у вигляді
представимо у вигляді
 (6)
(6)
де
![]() -
приведена довжина визначається як
-
приведена довжина визначається як
![]()
Підставляючи залежності (4) — (6) у рівняння (3), одержимо
 (7)
(7)
де,
![]() — площа поршня, що плаває.
— площа поршня, що плаває.
Припустимо,
що площі поршнів однакові, тобто
![]() і що між перетинами 1
і 2
існує тільки один складний місцевий опір — керований дросель,
площа прохідного перетину якого f=f(x).
Будемо
вважати також, що ефективна площа поршня
і що між перетинами 1
і 2
існує тільки один складний місцевий опір — керований дросель,
площа прохідного перетину якого f=f(x).
Будемо
вважати також, що ефективна площа поршня
![]() не
залежить від координати х.
Це допущення значно спрощує розрахунок сили гальмування.
не
залежить від координати х.
Це допущення значно спрощує розрахунок сили гальмування.
При
зроблених припущеннях сила гальмування
![]() ,
буде
залежати лише від
опору витіканню рідини з робочої порожнини, який визначається з
виразом (8):
,
буде
залежати лише від
опору витіканню рідини з робочої порожнини, який визначається з
виразом (8):
 (8)
(8)
Відповідно
до рівняння (8), сила гальмування складається із суми сил: сили
необхідної для подолання гідравлічного опору керованого дроселя
(перший доданок у правій частині); сили, необхідну для надання
прискорення
![]() масі рідини (другий доданок); і сили, необхідної для подолання опору,
обумовленого його тиском підпору
масі рідини (другий доданок); і сили, необхідної для подолання опору,
обумовленого його тиском підпору
![]() (третій доданок).
(третій доданок).
Тиск
![]() в залежності від конструкції компенсатора може бути як постійним,
зокрема, рівним атмосферному тискові, тобто
в залежності від конструкції компенсатора може бути як постійним,
зокрема, рівним атмосферному тискові, тобто
![]() =0,
так і перемінним, залежним від натягу
=0,
так і перемінним, залежним від натягу
![]() пружини і від її жорсткості
пружини і від її жорсткості
![]() ,
а отже, і від переміщення х
поршня, тобто
,
а отже, і від переміщення х
поршня, тобто
![]() (9)
(9)
Повний
опір
![]() ,
що виникає при переміщенні поршня під дією зовнішньої сили
,
що виникає при переміщенні поршня під дією зовнішньої сили
![]() ,
визначимо з рівняння балансу сил, прикладених до поршня, вважаючи
його масу малої, тобто
,
визначимо з рівняння балансу сил, прикладених до поршня, вважаючи
його масу малої, тобто
![]() (10)
(10)
де
![]() — сила сухого тертя;
— сила сухого тертя;
![]() — початковий натяг поворотної пружини з жорсткістю
— початковий натяг поворотної пружини з жорсткістю
![]() .
.
Підставивши вираження (8) в (10), з урахуванням (9) одержимо
 (11)
(11)
де
![]() —
приведена жорсткість пружин;
—
приведена жорсткість пружин;
![]() — постійна
складова сили опору.
— постійна
складова сили опору.
Якісну
картину зміни сили гальмування від переміщення поршня
![]() дає робоча діаграма (мал.3), побудована без обліку сил інерції
рідини і сухого тертя за розробленою методикою.
дає робоча діаграма (мал.3), побудована без обліку сил інерції
рідини і сухого тертя за розробленою методикою.
Sт
Мал.3 Робоча діаграма
Так
у початковому положенні поршня
![]() .
На робочому ході, коли (
.
На робочому ході, коли (![]() >
0) закон зміни сили гальмування визначається головним чином
гідравлічним опором (перший доданок у рівнянні (11)). При цьому
вибором перерізу дроселя f(x)
можна істотно впливати на характер залежності
>
0) закон зміни сили гальмування визначається головним чином
гідравлічним опором (перший доданок у рівнянні (11)). При цьому
вибором перерізу дроселя f(x)
можна істотно впливати на характер залежності
![]() .
.
Пружна
складова
![]() сили гальмування на мал.3 показана штриховою лінією. Заштрихована
площа відповідає роботі сили гідравлічного опору за цикл, і дорівнює
розсіяній механічній енергії. Площа, обмежена штриховою лінією і
координатними осями, відповідає роботі сили
сили гальмування на мал.3 показана штриховою лінією. Заштрихована
площа відповідає роботі сили гідравлічного опору за цикл, і дорівнює
розсіяній механічній енергії. Площа, обмежена штриховою лінією і
координатними осями, відповідає роботі сили
![]() і сили жорсткості пружини. Повернення поршня у вихідне положення у
випадку (
і сили жорсткості пружини. Повернення поршня у вихідне положення у
випадку (![]() < 0) відбувається під дією пружних сил.
< 0) відбувається під дією пружних сил.
Висновки та напрями подальших досліджень. В результаті проведених досліджень була розроблена математична модель визначення сил опору гідравлічних гальмівних пристроїв. Отримані результати дослідження за допомогою даної моделі дозволяють більш раціонально підбирати конструкцію та визначати основні характеристики гальмівного пристрою.
Список источников:
Башта Т.М. Гидропривод и гидропневмоавтоматика.- М.,Машиностроение, 1972,-320с.
Электропневмоавтоматика в производственных процессах: Учеб. Пособие/Е.В.Пашков, Ю.А. Осинский, А.А.Четверкин; Под ред. Е.В.Пашкова.-Севастополь: Изд-во СевНТУ, 2003.-496 с.
Гидравлика, гидромашины и гидроприводы: Учебник для машиностроительных вузов/Т.М. Башта, С.С.Руднев, Б.Б. Некрасов и др. – М.: Машиностроение, 1982.-423с.