ИССЛЕДОВАНИЕ ПРОЦЕССА ФОРМИРОВАНИЯ УСИЛИЙ В АВТОМАТИЗИРОВАННОЙ ВЫНЕСЕННОЙ СИСТЕМЕ ПОДАЧИ ПРИ ЗАКЛИНИВАНИИ ТЯГОВОЙ ЦЕПИ
Гуцалюк С.В., студент, Дубинин С.В., доцент
(Донецкий национальный технический университет, г. Донецк, Украина)
Источник: Автоматизация технологических объектов и процессов. Поиск молодых. / Сборник научных работ X научно-технической конференции аспиратнов и студентов в г. Донецке 20 – 22 мая 2010 г., — Донецк, ДонНТУ, 2010. — 267 с.
Эффективный контроль и защита от перегрузок в автоматизированной вынесенной системе подачи (ВСП) на основе электромагнитного тормоза скольжения (ЭТС) является основой для безаварийной работы оборудования. Одной из важных проблем ограничения перегрузок в элементах двухприводной ВСП является определение достоверных данных, на основании которых возможно построение эффективной автоматической защиты. Задача осложняется многофакторностью формирования и распределения нагрузок между приводами и тяговым органом ВСП. Рассмотрим процесс заклинивания рабочего участка тяговой цепи ВСП при помощи математического моделирования.
Математическая модель двухприводной ВСП с ЭТС описывается системой дифференциальных уравнений:
 |
(1) |
где U1m,U2m — напряжения возбуждения в обмотках ЭТС, В; iов1, iов2 — токи возбуждения в обмотках ЭТС, A; F12, F13 — силы упругого натяжения холостого и верхнего (рабочего) участков тяговой цепи, H [1]; F1, F2 — усилия, развиваемые тянущим и подтягивающим приводами, H.
Решение данной системы уравнений с учетом силы сопротивления цепи о направляющие (Fтр.ц) приведено на рис. 1 и 2.
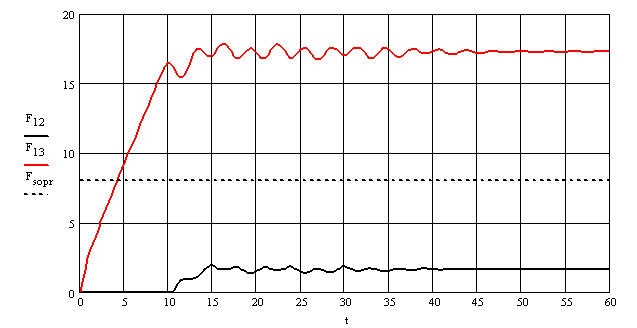
Рисунок 1 — Изменение силы упругого натяжения верхней (рабочей) и нижней ветви тяговой цепи
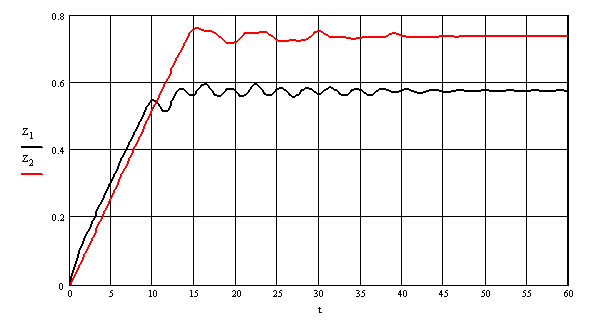
Рисунок 2 — Линейное перемещение крайних точек верхней (рабочей) и нижней ветви тяговой цепи
Из графиков видим, что при ограничении усилий, развиваемых приводами, величиной 20т получаем необходимое значение силы упругого натяжения F13 в тяговой цепи: усилия суммируются, расходуются на преодоление силы трения цепи о направляющие и рабочее (тяговое) усилие, передаваемое в цепь, не превышает допустимого.
Кроме того, из зависимостей следует, что разница перемещения крайних точек прямопропорциональна силе натяжения цепи. Следовательно, осуществить постоянный контроль величины этого натяжения возможно путем вычисления разницы перемещения «тянущий привод — комбайн» и «подтягивающий привод — тянущий привод».
Формулы для вычисления упругих натяжений с учетом перемещения комбайна имеют вид:
 |
(2) |
 |
(3) |
где C12 ,C13 — соответственно жесткость нижней и верхней (рабочей) ветвей тяговой цепи, Н/м; Z3 — линейное перемещение комбайна, м.
Перечень ссылок
1. Серов Л.А. Устройства управления и системы регулирования угледобывающих машин / Серов Л.А. — М.: Недра, 1995. — 167 с.
2. Санченко А.П., Дубинин С.В. Исследование автоматизированной двухприводной вынесенной системы подачи очистного комбайна и определение ее оптимальных параметров/Автоматизация технологических объектов и процессов. Сборник научных статей VII Международной научно-технической конференции аспирантов и студентов в г. Донецке 26-28 апреля 2007р. / Санченко А.П., Дубинин С.В. — Донецк: ДонНТУ, 2007.