3.5.3 Подсистемы перемещения комбайнов на основе электрических регуляторов скорости
Горбатов П.А.
Источник: Горбатов П.А. Гірничі машини для підземного видобудування вугілля: Навч.посіб. для вузів /П.А. Горбатов, Г.В. Петрушкін, М.М. Лисенко, С.В. Павленко, В.В. Косарев; Під заг.ред. П.А. Горбатова. 2-ге вид.перероб. і доп. — Донецьк: Норд Комп'ютер, 2006. — 669с.: іл.
В п.3.5.1 было приведено обоснование более высокой перспективности подсистем перемещения (или подсистем подачи) очистных комбайнов с современными электрическими регуляторами скорости по сравнению с подсистемами на основе гидравлических регуляторов.
Работы по созданию рассматриваемых подсистем с электрическими регуляторами велись в следующих направлениях.
1. Использование регулируемых двигателей постоянного тока с независимым, последовательным или смешанным возбуждением в комплекте с преобразователями электроэнергии, размещенными при наличии габаритных возможностей в корпусе машин (комбайны 1КШЭ) или установленными на штреке (РКУП10,1К10П).
Применение указанного электропривода обусловило необходимость преобразования электроэнергии от шахтной участковой сети переменного тока в энергию постоянного тока. Задание требуемых рабочих режимов работы электропривода осуществляется путем регулирования величин подводимого к двигателям напряжения или сопротивления в соответствующих электрических цепях.
2. Применение управляемых электромагнитных муфт скольжения (вынесенные подсистемы типа ВСП для комбайнов КА80, К103М, КА200, УКД200-250) и электромагнитных тормозов скольжения в сочетании с дифференциальными механизмами (встроенные подсистемы машин К500, К700, К85).
Задание требуемых рабочих режимов работы этих подсистем подачи осуществляется путем регулирования величины постоянного тока питания обмотки возбуждения муфты или тормоза.
3. Использование частотно-регулируемого электропривода на базе асинхронных электродвигателей с короткозамкнутым ротором в комплекте с преобразователями частоты и комплексами технических средств управления.
При этом преобразователи частоты формируют переменное напряжение, регулируемое по частоте и величине действующего значения в соответствии с управляющими алгоритмами, реализующими требуемый рабочий режим.
Опыт применения подсистем с регулируемым электроприводом постоянного тока показал их работоспособность и эффективность. Однако эти электродвигатели обладают рядом существенных недостатков, например, по сравнению с асинхронными с короткозамкнутым ротором:
- при одинаковых характеристиках в 3-4 раза выше трудоемкость изготовления, больший расход меди, в 2-3 раза выше стоимость и габариты;
- в 1,5-2 раза выше динамический показатель, определяемый отношением момента инерции к номинальному моменту двигателя;
- необходимость постоянного ухода за щеточно-коллекторным аппаратом в процессе эксплуатации;
- присущее щеточно-коллекторному аппарату искрение, что может провоцировать аварийные ситуации;
- необходимость применения дополнительного аппарата защиты от утечек тока на землю в электрической сети постоянного тока.
Сравнительно небольшое распространение для очистных комбайнов получили регуляторы скорости на основе электромагнитных муфт и тормозов скольжения.
Рассмотрим основные особенности конструкции и работы электромагнитных муфт скольжения (ЭМС) на примере вынесенных подсистем подачи типа ВСП, см. рис.3.5.1 и 3.5.9.
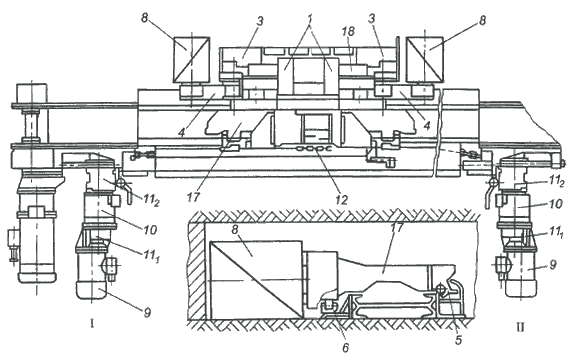
Рисунок 3.5.1 — Очистной комбайн К103М с вынесенными подсистемами перемещения
От асинхронного двигателя 9 (рис.3.5.1) через промежуточный редуктор 111 к выходному редуктору 112, на последнем валу которого размещена приводная звездочка, вращение передается через регулятор скорости 10 на основе ЭМС. Эта муфта (рис.3.5.9) состоит из корпусного узла 5, якоря 2, индуктора 6, обмотки возбуждения 3 и ярма 4. При подаче постоянного тока в обмотку 3 вокруг нее возникает электромагнитное поле, которое замыкается через зубцы индуктора, расположенные между якорем и ярмом, и формируется вращающий момент на ведомом элементе — индукторе. Регулирование скорости подачи Vп и тягового усилия Yп осуществляется путем изменения величины постоянного тока возбуждения в пределах 0 – 6 А.
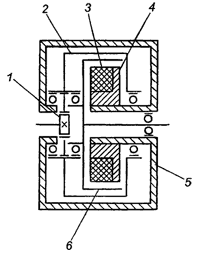
Рисунок 3.5.9 — Схемное решение электромагнитной муфты скольжения
Якорь имеет большую поверхность охлаждения благодаря наличию на его поверхности ребер. При вращении ребра формируют поток воздуха, который охлаждает ЭМС.
Рассмотрим основные особенности конструкции и работы подсистем подачи на основе электромагнитных тормозов скольжения (ЭТС) на одном из примеров реализованных технических решений, см. рис.3.5.10.
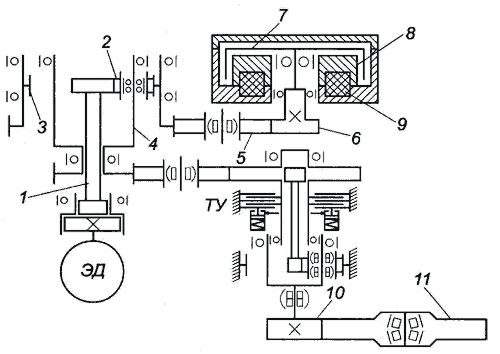
Рисунок 3.5.10 — Кинематическая схема подсистемы перемещения с электромагнитным тормозом скольжения
От асинхронного электродвигателя ЭД типа ЭКВ2,5-30 через зубчатую муфту вращение передается на самоустанавливающийся центральный вал 1 с внутренней солнечной шестерней дифференциального планетарного механизма с тремя сателлитами 2. Наружное солнечное колесо 3, установленное в корпусе на опорах качения, через паразитное колесо 5 и шестерню 6 кинематически связано с якорем 7 тормоза, имеющего обмотку возбуждения 9 и ярмо 8.
С водила 4 движение передается через паразитную шестерню на колесо, связанное с тормозным устройством ТУ, и далее на самоустанавливающуюся центральную вал-шестерню обычного планетарного редуктора с тремя сателлитами и неподвижным наружным солнечным колесом. На выходном конце водила на эвольвентных шлицах установлена приводная звездочка 10, которая через промежуточную звездочку 11 взаимодействует с жестким тяговым органом.
Кинематическая цепь может быть заторможена на корпус с помощью стояночного тормоза ТУ, выполненного на основе фрикционных дисков, сжатие которых осуществляется винтовыми пружинами, а разжатие — с помощью гидропатронов. Конструкцией предусмотрено водяное охлаждение ЭТС.
Общее устройство ЭТС и ЭМС для вышерассмотренных подсистем перемещения принципиально аналогично. Однако, если ЭМС обеспечивает передачу вращающего момента от ведущих элементов к ведомым, то ЭТС создает для наружного солнечного колеса дифференциала тормозной момент. Регулирование скорости подачи и тягового усилия при наличии ЭТС, как и в случае применения ЭМС, осуществляется путем изменения величины постоянного тока в обмотке возбуждения (пределы регулирования для рассмотренного варианта ЭТС 0-9 А). При полностью заторможенном ЭТС наружное солнечное колесо 3 вращается с минимальной частотой. Скорость подачи Vп в этом случае максимальна. При полностью расторможенном ЭТС это колесо вращается с максимальной частотой, что приводит к снижению Vп до нуля. При частично расторможенном ЭТС можно получать различные промежуточные значения Vп.
На рис.3.5.11а представлены естественные (при фиксированных значениях тока возбуждения) статические механические характеристики ЭМС и ЭТС М = М(n). Здесь: М и n — момент, Н·м, и угловая скорость, об/мин, на выходном звене ЭМС — индукторе или ЭТС с дифференциалом — водиле 4; Iв3 > Iв2 > Iв1 — значения тока возбуждения. Как видно, эти характеристики являются довольно мягкими, т.е. с изменением нагрузки М угловая скорость n значительно меняется, что не позволяет их рекомендовать для подсистем подачи.
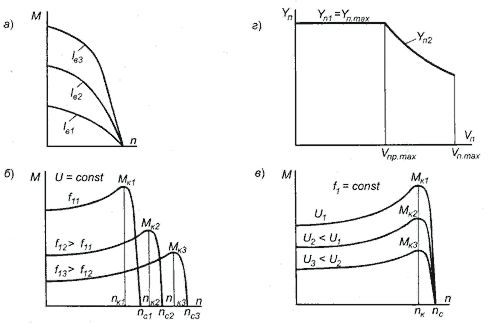
Рисунок 3.5.11 — Статические механические характеристики для подсистем перемещения с электрическими регуляторами скорости
Формирование искусственных (Iв = var) статических механических характеристик ЭМС и ЭТС М = М (n) а, следовательно, тягово-скоростных характеристик подсистем подачи Yп = Yп (Vп), осуществляется в соответствии с алгоритмами, обеспечивающими с помощью подсистем автоматизированного управления требуемые режимы работы.
Потери в ЭМС и ЭТС определяются в основном потерями скольжения. КПД этих электрических машин η в первом приближении связан со скольжением S зависимостью: η = 1 – S.
Основными недостатками ЭМС и ЭТС по сравнению с частотно-регулируемым асинхронным электроприводом с коротко-замкнутым ротором являются недостаточный КПД и высокая интенсивность нагрева при значительных скольжениях, соот¬ветствующих малым значениям Vп. Для мощных ЭМС и ЭТС необходимо предусматривать эффективные устройства для охлаждения.
Кроме того, в составе подсистем подачи с электрическими регуляторами на основе ЭМС или ЭТС имеется две электрические машины — приводной асинхронный электродвигатель и муфта скольжения или тормоз скольжения (в сочетании с дифференциальным механизмом).
Асинхронные электродвигатели являются машинами универсальными в части характера электропитания. Они могут работать как нерегулируемые при подключении к обычной шахтной электросети или как частотно-регулируемые, если питание осуществляется от преобразователей частоты. Частотно-регулируемый электропривод одновременно выполняет две функции — приводного двигателя и электрического регулятора скорости, что значительно упрощает конструктивное выполнение силовой кинематической цепи к приводному элементу движителя. Однако в этом случае существенно усложняется преобразовательная аппаратура по сравнению с применением ЭМС или ЭТС.