Вступ. Існує широкий клас механізмів, обладнаних електроприводами (ЕП) на базі асинхронних двигунів (АД) з фазним ротором (крани, рольганги, маніпулятори, кантувачі і ін). Як правило, регулювання швидкості таких електроприводів реалізовано з використанням параметричних методів регулювання (реостатне – у роторному колі, фазове – напругою у статорному та ін.), які призводять до неефективного використання електричної енергії, що споживається (мале значення к.к.д. при глибокому регулюванні швидкості або коефіцієнта потужності при малих навантаженнях). До того ж ще й спотворюється форма напруги мережі через несинусоїдальність ЕП струмів. Тому задача розробки систем ЕП на базі таких двигунів, які були б позбавлені вказаних вище недоліків, є досить актуальною, особливо якщо розглядати це питання в плані енергозбереження.
Постановка задачі. Розробка та дослідження асинхронного ЕП на базі машини з фазним ротором – високодинамічного, енергозберігаючого, з широким діапазоном регулювання швидкості, електромагнітно сумісного з мережею живлення.
Матеріали досліджень. Функціональна схема ЕП наведена на рис. 1. До складу ЕП входять асинхронний двигун М з фазним ротором з датчиком швидкості BR, силовий перетворювач UM з системою керування SC і струмообмежувальними реакторами L1..3, датчики роторних струмів UA1..3, датчики UE е.р.с. ротора з задатчиком U форми роторних струмів, регулятори AA1..3 фазних струмів ротора і швидкості AR.
Силовий перетворювач являє собою безпосередній перетворювач частоти з двостороннім обміном енергії між ротором М і мережею живлення, який працює в режимі джерела струму. Частоту роторного струму визначають роторні є.р.с., а амплітуди – аналоговий регулятор швидкості AR. Регулятори роторних струмів – релейні і забезпечують відстеження сигналу завдання синусоїдальної форми з частотою ковзання ротора. До складу UM входить і силовий активний фільтр на базі мостового модуля на IGBT-вентилях, що забезпечує формування вхідних струмів перетворювача синусоїдальної форми, що співпадають за фазою з фазними напругами мережі.
Оскільки роторні струми формуються зовнішнім по відношенню до машини джерелом струму і вони співпадають за фазою з е.р.с. роторних обмоток, тобто є чисто «активними» (що формують момент), то АД можна розглядати як двигун постійного струму з незалежним збудженням.
У цьому випадку момент АД, не враховуючи втрату напруги збудження від протікання приведеного роторного струму Ip по обмотці статора (r1, x1), можна записати так:
де Eуч- номінальне значення лінійної роторної е.р.с., В;
ω0- швидкість обертання магнітного поля, с-1;
(СФ)0- величина магнітного потоку в режимі холостого ходу, Вс.
У режимі навантаження АД магнітний потік зменшується за рахунок падіння напруги на активному r1 та індуктивному x1 опорах обмотки статора від роторного струму.
З достатньою точністю магнітний потік можна визначити так:
де r`1, x`1 - приведені до роторних опори статорних обмоток ( - приведені до роторних опори статорних обмоток (,,), Ом;
ky- коефіцієнт приведення опорів ( - коефіцієнт приведення опорів ();
kT, ki- коефіцієнти трансформації е.р.с. і струмів АД.
Механічні характеристики (МХ) АД мають вигляд «вертикальних» ліній, що зніходяться від осі швидкості на відстані:

де Uві- величина завдання на вході релейного регулятора струму, В;
kді, - коефіцієнт передачі датчика роторного струму, В/А.
При замиканні системи керування ЕП зворотнім зв’язком за швидкістю рівняння МХ буде мати вигляд (рис.2):

де kрω, kдω- величини коефіцієнтів підсилення регулятора та датчика швидкості, Вс,
Uрω - величина завдання на рівень швидкості, В.
При використанні ПІ-регулятора швидкості механічні характеристики будуть прямими, паралельними осі моменту ().
Математична модель такого ЕП має вид:

де Uk – додаткові напруги, що вводяться в роторні кола релейними регуляторами струмів, В;
Um – максимальне значення лінійної напруги мережі живлення, В;
ψ1, γ1 - узагальнені вектори потокозчеплення статора і струму ротора, Вс, А;
 - поворотний вектор;
- поворотний вектор;
pпω - число пар полюсів обмоток АД;
ψj – повне потокозчеплення кожної з обмоток статора, Вс, наприклад:

LA – повна індуктивність обмотки статора, Гн;
М1 – взаємна індуктивність обмотки статора з двома іншими обмотками статора, Гн;
М12 – взаємна індуктивність обмотки статора з обмоткою ротора при співпаданні їх осей, Гн;
 - електричний кут повороту роторних обмоток, рад.
- електричний кут повороту роторних обмоток, рад.
Математичне моделювання повністю підтвердило усі теоретичні положення, що були покладені в основу розробки такого ЕП.
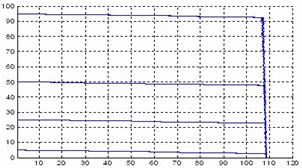
На рис. 3 подані результати моделювання динамічних режимів ЕП за математичною моделлю (5). У пуско-гальмівних режимах регулятори роторних струмів за завданням на виході регулятора швидкості формують динамічний момент ЕП, якщо на вході AR вмикається задатчик інтенсивності швидкості. При цьому слід наголосити, що максимальний момент двигуна значно збільшується (Mm=110 Нм при Mk=65 Нм) і обмежується тільки можливостями вентильного перетворювача UM.
По суті запропонований ЕП є машиною подвійного живлення з прямим синхронним векторним керуванням без контролю просторового положення векторів потокозчеплень статора та ротора, оскільки вектори роторних е.р.с. «прив’язані» до вектора сумарного потоку у зазорі АД, а роторні струми – до відповідних е.р.с.
Висновки. Розроблений ЕП має дуже високу перевантажувальну здатність, тобто є високодинамічним. Він забезпечує широкий діапазон регулювання швидкості. При цьому ЕП електромагнітно сумісний з мережею живлення, оскільки споживає практично синусоїдальні струми.
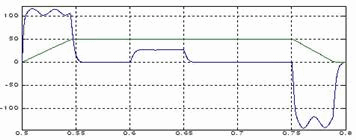
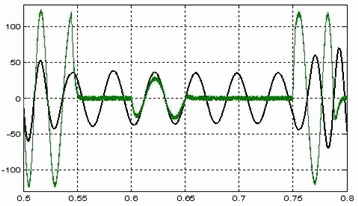
а) осцилограми моменту та швидкості; б) осцилограми роторних струмів та е.р.с.