In this paper the performance of a split-phase motor and a three-phase induction motor drives for soft starting is evaluated. The paper systematically investigates and compares the characteristics of a variable voltage fed induction motor drive for two different types of soft starters; one based on IGBT and another based on Thyristor. Experimental validation is done using analogue circuit based system, developed in the laboratory. The novelty of the work lies in the development of simple and flexible models for simulation purpose and their experimental validation.
Keywords: Variable speed electric drives, Soft starter, Thyristor, IGBT
Direct on-line starting of large induction motors poses a great problem to the grid as well as the motor itself due to sudden voltage dips and large fluctuating torque, Willams and Griffth (1978), Bruce et al. (1984) and Nevelsteen and Aragon (1989). Some time due to tripping of under-voltage and over-load relays the motor may fail to start. Alternatively reduced voltage starting is being used especially for starting of large induction machines using auto-transformers. However, the volume and the cost of auto-transformers limit its use. Power Electronics converter based induction motor starters more commonly called soft starter are becoming popular and are rapidly replacing the conventional reduced voltage starters using auto-transformers, Shephard (1976), Mazda (1973), Mozder and Bose (1976), Rashid (1993), Rowan and Merrison (1991), Lipo (1971a) and Lipo (1971b). Two topologies of soft starters are more commonly employed
Thyristor based soft starters are economical, simple, and reliable. They can be economically employed in medium voltage large induction motor starting where the starting torque requirement is low. By using power electronics converter based starting, the initial inrush current of motor can be reduced significantly. Additionally they offer smooth acceleration, ease in implementation of current control, and energy savings with a partial load can be available. The thyristors are initially triggered at a large firing angle (reduced voltage) when soft started, followed by decrease in the firing angle and subsequently increase in the applied voltage to the motor. The initial starting torque at standstill of an induction motor is proportional to the square of the applied voltage. Thus this surely affects the starting of induction motor on load. Additionally the output voltage quality is poor with high distortion and poor power factor. The problem of higher THD is more prominent at large firing angle. This method is highly efficient if the motor is working under light load condition as demonstrated in Eltamaly et al. (2007a), Eltamaly et al. (2007b), Vazquez et al. (2008) and Hamed and Chalmers (1990).
Numerous attempts have been made worldwide to improve the performance of the soft starters and a number of different variants are evolved, Jang and Choe (1998), Deleroi et al. (1989), Zenginobuz et al. (2004), Gastli and Ahmed (2005), and Kashif and Saqib (2007). A step-up/down ac voltage regulator is used by Hyun and Choe (1998), in which the transformer with tap changer and PWM chopper, is reported. The proposed regulator topology can step up or down the output voltage by the tap changer of transformer and offers accurate output voltage to load by adjusting the PWM chopper. The major improvement with this scheme is the continuous ac side input current in contrast to the conventional ac regulator where the input current happens to be discontinuous. In Deleroi et al. (1989) a switching function is defined based on triggering angle of the thyristor and is implemented in the controller. The transient response is improved considerably with such technique. The performance of induction motor starter using soft starter is improved considerably by Zenginobuz (2004) where the starting is optimized in such as way to eliminate the supply frequency torque pulsation. Artificial intelligence based techniques have been employed to improve the starting characteristics by Gastli and Ahmed (2005) and Kashif and Saqib (2007). More recently Zhong et al. (2009) have adopted the pump control soft start scheme to improve the starting behaviour of induction machine. PWM signals are generated by the control unit which triggers the thyristors to keep the current within the specified limit. The pump control is a torque control method which uses PID control to adjust the motor torque. On the other hand Bernatt et al. (2009), have proposed special design of rotor cage of large induction machine for better starting performance. Eltamaly et al. (2009) have proposed digital firing scheme of triacs based on the current shape of the input. The sensor detects the operating mode and accordingly the triacs gate pulses are generated. Charles and Bhuvameswari (2009) have utilised shunt active filter between the ac voltage controller and input grid supply to mitigate the power quality problem arises due to the ac voltage controller acting alone.
This paper focuses on the classical topology of the soft starter based on thyristor and IGBT power switches for both single-phase and three-phase induction motors. A complete simulation model is obtained using Matlab/Simulink software for the proposed topologies. Then a prototype analog circuit based soft starter is developed in the laboratory and the simulation results are verified using experimental implementation of the same. Thus the major objectives of the paper include the development of simple and flexible simulation model for the soft starters of induction machine. The behaviour of the starters can be easily verified by the proposed simulation models. The paper is organised in five sections; the second section deals with the single-phase system, the second section details the implementation of three-phase drive system, the third section details the experimental investigation followed by the conclusion and references.
In the modern era, almost all the processes and techniques are at first simulated before their actual real time implementation. This reduces a significant portion of effort and cost of real time implementation. The performance of the proposed system/process/technique can be evaluated accurately by using proper simulation models. Thus the models should be flexible and accurate to take into account the real time implementation issues as well. With the rapid development in computer hardware and software, new simulation packages which are much faster and more user friendly are now available. This paper discusses the use of one such software, the SIMULINK software of MATLAB. The main advantage of the SIMULINK over other programming software is that, instead of compilation the simulation model is built systematically by means of function blocks. A set of machine differential equations can be modelled by interconnection of appropriate blocks, each of which performs a specific mathematical operation. Programming efforts are drastically reduced and the debugging of errors is easy. Since the SIMULINK is model operation programme, the simulation model can be easily developed by addition of new sub-models to cater for various control functions. The induction motor could be incorporated in the complete electric motor drive system from Simulink Library. Simulink modelling of single-phase and three-phase voltage regulators of two types i.e., thyristor and IGBT based are done and the results are evaluated in the subsequent sections.
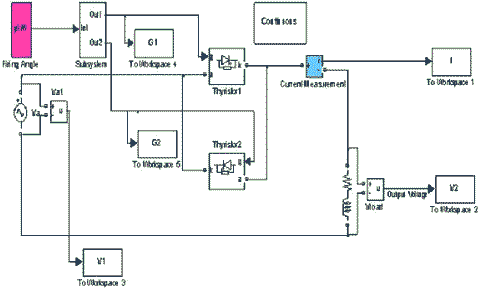
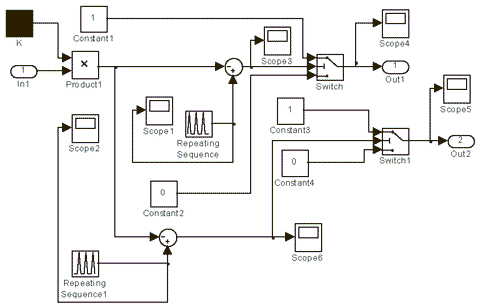
The complete simulation model of a single-phase voltage regulator for soft starting of induction machine using thyristors is shown in Figure 1. Single-phase sinusoidal voltage is generated using voltage source block from Simulink Library. Gate pulses generated by subsystem (shown in Figure 2) are given to the anti-parallel thyristors. The switching signals have either 0 (turn off) or 1 (turn on). The load is taken as a simple R-L load and a split phase capacitor start motor. The model shown in Fig. 1 depicts R-L load while motor simply replaces this load and the results are elaborated for both R-L and motor load. Simulation is carried out to determine the total harmonic distortion in the output current and the resulting values are listed in Table I for both R-L load and single-phase motor load.
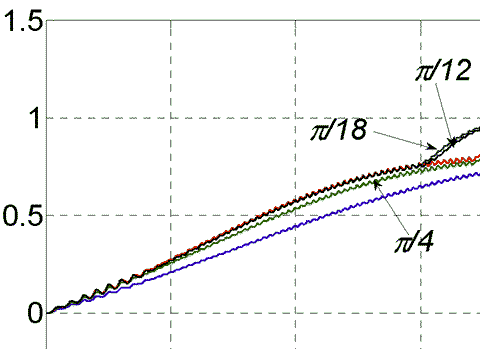
The controllable range of firing angle (α) is from α = 0 to α = π/2. However, the table shows the THD for conduction angle of upto 60 degrees. The Total Harmonic Distortion (THD) increases for higher values of a, which indicates the increased harmonics in the line current and voltages. It is to be noted that the THD is significantly lower for motor load compared to the corresponding R-L load. The motor speed response to various conduction angles are illustrated in Figure 3. It is clearly observed that the response is faster for smaller conduction angle and the response becomes slower for progressively increasing conduction angle. This is due to obvious reason of lower average output voltages.
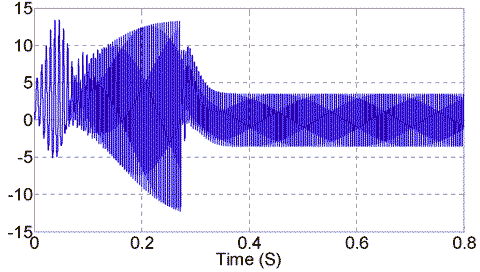
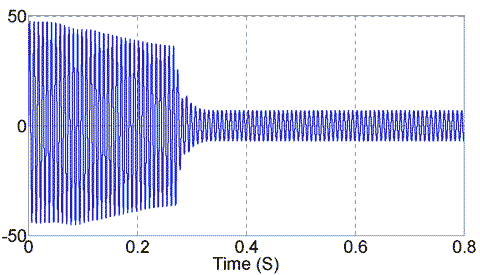
The torque response and stator and rotor current waveforms of split-phase motor for conduction angle of 60° are illustrated in Figure 4-5. A typical motor response is observed, the stator current and torque settles to it their steady-state values once the motor attains the steady state speed. On the other hand it is observed that the speed response contains ripple.