http://www.qi.tnw.tudelft.nl/Courses/FIP/noframes/fip-Segmenta.html
Segmentation
- Thresholding
- Edge finding
In the
analysis of the objects in images it is essential that we can distinguish
between the objects of interest and "the rest." This latter group is
also referred to as the background. The techniques that are used to find the
objects of interest are usually referred to as segmentation techniques - segmenting
the foreground from background. In this section we will two of the most common
techniques - thresholding and edge finding - and we
will present techniques for improving the quality of the segmentation result.
It is important to understand that:
- there is no universally
applicable segmentation technique that will work for all images, and,
- no segmentation technique is
perfect.
Thresholding
This
technique is based upon a simple concept. A parameter called the brightness
threshold is chosen and applied to the image a[m,n] as follows:
![]()
This
version of the algorithm assumes that we are interested in light objects on a
dark background. For dark objects on a light background we would use:
![]()
The output
is the label "object" or "background" which, due to its
dichotomous nature, can be represented as a Boolean variable "1" or
"0". In principle, the test condition could be based upon some other
property than simple brightness (for example, If (Redness{a[m,n]} >= red), but the concept is clear.
The central
question in thresholding then becomes: how do we
choose the threshold? While there is no universal procedure for threshold
selection that is guaranteed to work on all images, there are a variety of
alternatives.
1.
Fixed
threshold - One alternative is to use a threshold that is chosen independently
of the image data. If it is known that one is dealing with very high-contrast
images where the objects are very dark and the background is homogeneous
(Section 10.1) and very light, then a constant threshold of 128 on a scale of 0
to 255 might be sufficiently accurate. By accuracy we mean that the number of
falsely-classified pixels should be kept to a minimum.
2.
Histogram-derived
thresholds - In most cases the threshold is chosen from the brightness
histogram of the region or image that we wish to segment. (See Sections 3.5.2
and 9.1.) An image and its associated brightness histogram are shown in Figure
51.
A variety
of techniques have been devised to automatically choose a threshold starting
from the gray-value histogram, {h[b] | b = 0, 1, ... ,
2B-1}. Some of the most common ones are presented below. Many of these
algorithms can benefit from a smoothing of the raw histogram data to remove
small fluctuations but the smoothing algorithm must not shift the peak
positions. This translates into a zero-phase smoothing algorithm given below
where typical values for W are 3 or 5:
![]()

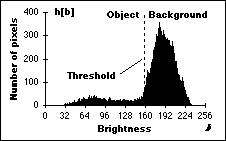
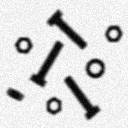
(a) Image to be thresholded
(b) Brightness histogram of the image
Figure 51:
Pixels below the threshold (a[m,n]
< ) will be labeled as object pixels; those above the threshold will be
labeled as background pixels.
* Isodata algorithm - This iterative technique for choosing a
threshold was developed by Ridler and Calvard .
The histogram is initially segmented into two parts using a starting threshold
value such as 0 = 2B-1, half the maximum dynamic range. The sample mean (mf,
0) of the gray values associated with the foreground pixels and the sample mean
(mb,0) of the gray values associated with
the background pixels are computed. A new threshold value 1 is now computed as
the average of these two sample means. The process is repeated, based upon the
new threshold, until the threshold value does not change any more. In formula:
![]()
*
Background-symmetry algorithm - This technique assumes a distinct and dominant
peak for the background that is symmetric about its maximum. The technique can
benefit from smoothing as described in eq. The maximum peak (maxp) is found by searching for the maximum value in the
histogram. The algorithm then searches on the non-object pixel side of that
maximum to find a p% point as in eq. (39).
In Figure
51b, where the object pixels are located to the left of the background peak at
brightness 183, this means searching to the right of that peak to locate, as an
example, the 95% value. At this brightness value, 5% of the pixels lie to the
right (are above) that value. This occurs at brightness
![]()
This
technique can be adapted easily to the case where we have light objects on a
dark, dominant background. Further, it can be used if the object peak dominates
and we have reason to assume that the brightness distribution around the object
peak is symmetric. An additional variation on this symmetry theme is to use an
estimate of the sample standard deviation (s in eq. (37)) based on one side of
the dominant peak and then use a threshold based on = maxp +/- 1.96s
(at the 5% level) or = maxp +/- 2.57s (at the 1% level). The choice of
"+" or "-" depends on which direction from maxp is being defined as the object/background threshold.
Should the distributions be approximately Gaussian around maxp,
then the values 1.96 and 2.57 will, in fact, correspond to the 5% and 1 %
level.
* Triangle
algorithm - This technique due to Zack [36] is illustrated in Figure
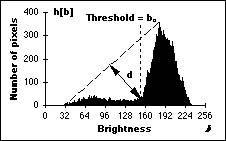
Figure 52: The triangle algorithm is based on
finding the value of b that gives the maximum distance d.
The three
procedures described above give the values = 139 for the Isodata
algorithm, = 150 for the background
symmetry algorithm at the 5% level, and
= 152 for the triangle algorithm for the image in Figure 51a.
Thresholding does not have to be applied to entire images but can be used on a
region by region basis. Chow and Kaneko developed a variation in which the M x
N image is divided into non-overlapping regions. In each region a threshold is
calculated and the resulting threshold values are put together (interpolated)
to form a thresholding surface for the entire image.
The regions should be of "reasonable" size so that there are a
sufficient number of pixels in each region to make an estimate of the histogram
and the threshold. The utility of this procedure-like so many others-depends on
the application at hand.
Edge finding
Thresholding produces a segmentation that yields all the pixels that, in principle,
belong to the object or objects of interest in an image. An alternative to this
is to find those pixels that belong to the borders of the objects. Techniques
that are directed to this goal are termed edge finding techniques. From our
discussion in Section 9.6 on mathematical morphology, specifically
eqs. , , and , we see
that there is an intimate relationship between edges and regions.
1. Gradient-based procedure - The central challenge to edge finding techniques is to find procedures that produce closed contours around the objects of interest. For objects of particularly high SNR, this can be achieved by calculating the gradient and then using a suitable threshold. This is illustrated in Figure 53.
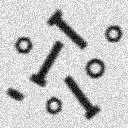
(a) SNR = 30 dB (b) SNR = 20 dB
Figure 53: Edge finding based on the Sobel gradient, eq. (110), combined with the Isodata thresholding algorithm
While the
technique works well for the 30 dB image in Figure 53a, it fails to provide an
accurate determination of those pixels associated with the object edges for the
20 dB image in Figure 53b. A variety of smoothing techniques as described in
Section 9.4 and in eq. can be used to reduce the noise effects before the
gradient operator is applied.
*
Zero-crossing based procedure - A more modern view to handling the problem of
edges in noisy images is to use the zero crossings generated in the Laplacian of an image (Section 9.5.2). The rationale starts
from the model of an ideal edge, a step function, that has been blurred by an
OTF such as Table 4 T.3 (out-of-focus), T.5 (diffraction-limited), or T.6 (general
model) to produce the result shown in Figure 54.

Figure 54: Edge finding based on the zero
crossing as determined by the second derivative, the Laplacian.
The curves are not to scale.
The edge
location is, according to the model, at that place in the image where the Laplacian changes sign, the zero crossing. As the Laplacian operation involves a second derivative, this
means a potential enhancement of noise in the image at high spatial
frequencies; see eq. (114). To prevent enhanced noise from dominating the
search for zero crossings, a smoothing is necessary.
The
appropriate smoothing filter, from among the many possibilities described in
Section 9.4, should according to Canny have the following properties:
1.
In
the frequency domain, (u,v) or (![]() ,
,![]() ), the filter
should be as narrow as possible to provide suppression of high frequency noise,
and;
), the filter
should be as narrow as possible to provide suppression of high frequency noise,
and;
2.
In
the spatial domain, (x,y) or
[m,n], the filter should be as narrow as possible to
provide good localization of the edge. A too wide filter generates uncertainty
as to precisely where, within the filter width, the edge is located.
The
smoothing filter that simultaneously satisfies both these properties--minimum
bandwidth and minimum spatial width--is the Gaussian filter described in
Section 9.4. This means that the image should be smoothed with a Gaussian of an
appropriate followed
by application of the Laplacian. In formula:
![]()
where
g2D(x,y) is defined in eq. (93). The derivative
operation is linear and shift-invariant as defined in eqs.
(85) and (86). This means that the order of the
operators can be exchanged (eq. (4)) or combined into one single filter (eq.
(5)). This second approach leads to the Marr-ildreth
formulation of the "Laplacian-of-Gaussians"
(LoG) filter :
![]()
where
![]()
Given the circular
symmetry this can also be written as:
![]()
This
two-dimensional convolution kernel, which is sometimes referred to as a
"Mexican hat filter", is illustrated in Figure 55.
(a) -LoG(x,y) (b) LoG(r)


Figure 55: LoG filter
with = 1.0.
*PLUS-based
procedure - Among the zero crossing procedures for edge detection, perhaps the
most accurate is the PLUS filter as developed by Verbeek
and Van Vliet . The filter is defined, using eqs.
(121) and (122), as:

Neither the
derivation of the PLUS's properties nor an evaluation of its accuracy are within the scope of this
section. Suffice it to say that, for positively curved edges in gray value
images, the Laplacian-based zero crossing procedure
overestimates the position of the edge and the SDGD-based procedure
underestimates the position. This is true in both two-dimensional and
three-dimensional images with an error on the order of (/R)2
where R is the radius of curvature of the edge. The PLUS operator has an error
on the order of (/R)4 if the image is sampled at, at
least, 3x the usual Nyquist sampling frequency as in
eq. (56) or if we choose >= 2.7 and
sample at the usual Nyquist frequency.
All of the methods based on zero crossings in the Laplacian must be able to distinguish between zero crossings and zero values. While the former represent edge positions, the latter can be generated by regions that are no more complex than bilinear surfaces, that is, a(x,y) = a0 + a1*x + a2*y + a3*x*y. To distinguish between these two situations, we first find the zero crossing positions and label them as "1" and all other pixels as "0". We then multiply the resulting image by a measure of the edge strength at each pixel. There are various measures for the edge strength that are all based on the gradient as described in Section 9.5.1 and eq. . This last possibility, use of a morphological gradient as an edge strength measure, was first described by Lee, aralick, and Shapiro and is particularly effective. After multiplication the image is then thresholded (as above) to produce the final result. The procedure is thus as follows :

Figure 56: General strategy for edges based on
zero crossings.
The results
of these two edge finding techniques based on zero crossings, LoG filtering and PLUS filtering, are shown in Figure 57
for images with a 20 dB SNR.



a) Image SNR = 20 dB b) LoG
filter c) PLUS filter

Figure 57: Edge finding using zero crossing
algorithms LoG and PLUS. In both algorithms = 1.5.
Edge
finding techniques provide, as the name suggests, an image that contains a
collection of edge pixels. Should the edge pixels correspond to objects, as
opposed to say simple lines in the image, then a
region-filling technique such as eq. may be required to provide the complete
objects.