
- Subject master work: Connection interface between processor and external devices in SYMBRION REPLICATOR
- Supervisor: Prof. Dr.-Ing. Svyatny Vladimir Andreevich
- Consultants: Senior Lecturer Shevchenko Olga Georgievna,
Eugen Meister (IPVS)
Abstract
Connection interface between processor and external devices in SYMBRION REPLICATOR
Contents
Introduction
Goals and tasks of the study
Relevance of work. Review of research and development on the subject
Scientific novelty
Conclusion
Bibliography
Introduction
Now hard to imagine a world without the various devices. They are created for all spheres of life. They are home appliances, computers, and robots. Creation of the first robots to help people, was a huge achievement for mankind. Replacement of many productions with simply conveyer belts became possible. There are robots along conveyer belts, and each performs its function. Writing control programs for robots of this type was not very difficult, because each robot performed a strictly limited set of commands needed to achieve a narrow goal.
Robotic technology is advancing very quickly. Ever-increasing challenges that robots can perform, requires improvement of the quality of performance. Appear robots capable of learning, — they can be called robots with artificial intelligence. They need to accumulate knowledge and then, based on analysis of their environment, this knowledge alone take any action that would eventually lead to the desired effect.
Developing robots with artificial intelligence is a complex task, which is the goal in a large number of research projects around the world. One such project — a European project SYMBRION REPLICATOR [1].
Goals and tasks of the study
The main focus of the project SYMBRION REPLICATOR is to investigate and develop novel principles of adaptation and evolution for symbiotic multi-robot organisms based on bio-inspired approaches and modern computing paradigms. Such robot organisms consist of super-large-scale swarms of robots, which can dock with each other and symbiotically share energy and computational resources within a single artificial-life-form. When it is advantageous to do so, these swarm robots can dynamically aggregate into one or many symbiotic organisms and collectively interact with the physical world via a variety of sensors and actuators.
The bio-inspired evolutionary paradigms combined with robot embodiment and swarm-emergent phenomena, enable the organisms to autonomously manage their own hardware and software organization. In this way, artificial robotic organisms become self-configuring, self-healing, self-optimizing and self-protecting from both hardware and software perspectives. This leads not only to extremely adaptive, evolve-able and scalable robotic systems, but also enables robot organisms to reprogram themselves without human supervision and for new, previously unforeseen, functionality to emerge. In addition, different symbiotic organisms may co-evolve and cooperate with each other and with their environment [1].
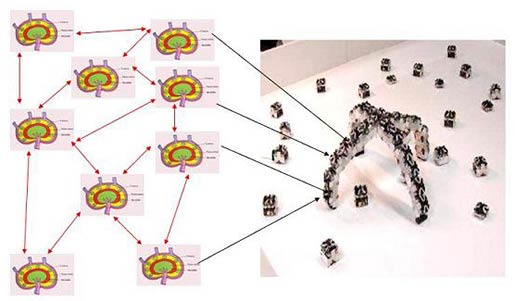
Figure 1 — The complex robotic system
The development of various devices necessarily a problem of communication between the CPU and peripherals. Under the periphery can be understood as additional processors, and various external devices, such as memory cards. One of the interfaces, which can be used for this purpose, is a Serial Peripheral Interface (SPI).
In the scientific cooperation with the University of Stuttgart goal was to test the feasibility of choice as a basic SPI interface exchange of information between internal devices robot.
Tasks:
- study of possible types of interfaces:
- the maximum speed of information transmission,
- cost of equipment,
- ease of use;
- compare the characteristics of various interfaces;
- rationale for the choice interface.
Relevance of work. Review of research and development on the subject
Robotics — is one of the most promising areas of mechanics. Already in the eighties of the last century were written in the book [2], describing the principles of building robots, the main of which are as relevant today [9].
Robotics quickly out of the various laboratories, there are courses Robotics ([3], [4]), in Many colleges and universities there are faculty [5] and specialty [6], related to the topic.
Problems of artificial intelligence begins to illuminate in various popular magazines [7], there are already courses on artificial intelligence [8].
Also the relevance of the theme says a lot of options, which was found in the process of establishing a search report [10]. Unfortunately, in the English-language Internet sites found more than 100 times greater than in Russian (7,140,000 and 66,300). Similar trends are observed for most queries on the subject.
Scientific novelty
Innovative solution is the division of control of a robot between multiple processors. In a typical architecture of a robot with a single central processor drawback was the constant high energy consumption, if for some tasks required more computing power. After solving these problems, the CPU usage is minimal. Solution of this problem with multiple processors, taking into account the characteristics of each of them has helped to optimize the balance between the computational and power consumption. One of the options division of responsibilities between the processor might look as follows:
- fastest processor:
- handles the video stream,
- gives resources to solve common for a complex dynamic system problems (such as creating and modifying genetic models),
- manages all peripheral devices;
- weaker processor controls the actuators (motors) with significantly lower power consumption;
- microcontroller with low power consumption, but accurate ADC is designed for processing information received from various sensors, and transfer it to the main processor.
With a distribution of functions among the processors necessarily a need for interaction between them, ie, in interface design.
Conclusion
All the work based on the research related to the SPI in terms of the project SYMBRION REPLICATOR is complete [11]. This will allow its use to continue development on the management of complex robotic systems. These kinds of works, thanks to a treaty on international cooperation between Donetsk National Technical University and University of Stuttgart, will be held in Germany.
By this time the master work is not finished yet. Current abstract, full text of work and materials on the topic will be posted on my personal website ( http://stepanenko.org.ua/) in December 2010 — after graduation.
Bibliography
- SYMBRION REPLICATOR : HomePage [Электронный ресурс]. — Режим доступа: http://www.symbrion.eu/
- Бабич А.В., Баранов А.Г., Калабин И.В. и др. Промышленная робототехника: Под редакцией Шифрина Я.А. — М.: Машиностроение, 1982 — 415 с., ил.
- Шахинпур М. Курс робототехники: Пер. с англ. — М.; Мир, 1990. 527 с., ил.
- Попов Е.П., Письменный Г.В. Основы робототехники: Введение в специальность: Учеб. для вузов по спец. «Роботехнические системы и комплексы» — М.: Высш. шк., 1990. — 224 с., ил.
- Кафедра «Робототехнические системы» — Белорусский национальный технический университет [Электронный ресурс]. — Режим доступа: http://www.bntu.by/ru/struktura/facult/fitr/chairs/c_rts/
- Специальность «Робототехнические системы и комплексы» — Национальный аэрокосмический университет им. Н.Е. Жуковского «Харьковский авиационный институт». [Электронный ресурс]. — Режим доступа: http://www.khai.edu/page.php?pid=116
- Осипов Г. Искусственный интеллект: основные направления и состояние исследований \\ журнал «Компьютерра» №30 от 02 августа 2002 года
- Робототехнические системы с элементами искусственного интеллекта — Интернет-Университет Информационных Технологий [Электронный ресурс]. — Режим доступа: http://www.intuit.ru/department/human/isrob/8/1.html
- Математичні машини і системи [Электронный ресурс]: 2000. — Режим доступа: http://scholar.google.com/scholar_host?q=info:aSRLdfrKrHcJ:scholar.google.com/&output=viewport&=1
- Степаненко С. В. Отчёт о поиске [Электронный ресурс]: 2010. — Режим доступа: Отчёт о поиске
- Степаненко С. В., Meister E., Шевченко О. Г. Использование последовательного периферийного интерфейса (SPI) для связи процессора и внешних устройств Тезисы докладов Донецк 2010. Электронная версия представлена в библиотеке