
Source of information: International Society for Mine Surveying. XIII
International Congress, Budapest, Hungry, 24 - 25 September 2007.
Abstract
The Global Positioning System (GPS) is a satellite-based system for identification of position and time on the Earth’s surface and adjacent space. Satellites transmit signals which are received by receivers and processed for surveying and navigation purposes. The fact that the satellite system provides data independently of weather conditions, round the clock and anywhere in the world is a major advantage of the system. During the last two decades the satellite technology has been undergoing fast developments world-wide, which has resulted in the use of GPS technology in many fields – besides the military sector. In the surface raw material mining industry the GPS has proven to be useful mainly at resolving classic surveying tasks and monitoring of movements of vehicles. The option is now investigated of utilisation the GPS technology also for facilitation of the mining process.
Use of the GPS for Determination of Excavator Bucket Wheel Position
The main options for use of GPS within mines are these:
•Surveying (locating and mapping of mines, GIS, tracing)
•Geology (locating and tracing of wells, locating of geological elements)
•Geo-technics (monitoring of the stability of slopes)
•Facilitation of the mining process
•Modifications of surfaces and reclamation.
•Monitoring of movements of vehicles etc.
It is obvious that if the 3D position of excavation elements of mining machinery and associated mining mechanisms can be determined relatively acurately, multiple task can be successfully resolved in terms of control of this hardware. As far as brown coal surface mines are concerned, the following topics are of prime interest:
•Facilitation of the process of control of excavator operation (e.g. prognoses of qualitative parameters of coal being mined)
•Calculations of volumes of mined materials in real time.
•Very accurate control of creation of the movement plane of the excavator and immediate control of mining targets.
•Control and checking of associated mining mechanisms (e.g. dozers).
Great numbers of sold dozers enable unification of the systems and most dozer-manufacturing companies provide this solution on, more or less, turn key basis. With bucket wheel excavators the situation is more complicated. In these instances it is necessary to proceed on individual basis and the system must be tailored for a concrete type of excavator. In Germany, in the Rhineland Coal Basin, employment of GPS technology for excavators started in 1985 (in cooperation with professor Seeber of Hanover University, on an excavator in Frimmersdorf mine). Relatively promising results of experiments carried out at one excavator in the Bergheim mine in 1999 resulted, in the end, in designing an extensive project named SATAMA (1). At the end of 1995 some components of this concept were tested for routine operation. The expert public were informed about the results of this project through specialised journals (e.g. “Surface Mining”).
As far as the North Bohemia Brown Coal Basin is concerned, the first real attempts of using the GPS technology for determination of the position of the bucket wheel were made in 1997 by the North Bohemia Mining Company – Nastup Tusimice Operating Company (“OpCo”). In comparison with the situation in the Rhineland Coal Basin the situation is complicated by the fact that most bucket wheel excavator are equipped with extensible bucket wheel boom. Therefore another variable must be sensed and evaluated. At the Libous mine, use was tested, in cooperation with the Brown Coal Research Institute PLC, of GPS devices made by Ashtech, Inc. (Z-12) and Trimble Navigation Ltd. (Trimble 7400 Msi), which devices were lent by the then vendors. The experiments were aimed at testing the usability of the GPS system in real field conditions. Determination of the centre point of the bucket wheel axis was the primary goal. The testing took place on 22 July 1997 (10:30 – 13:30 Summer Central European Time) and on 23 July 1997 (9:00-12:30 Summer Central European Time). At the time of the observation, the excavator operated continuously, with short-lived (30-minute) outages at all profiles of the technological benches. The results were promising and suitable positioning of GPS devices was verified. Afterwards, the experiments were discontinued due to, among others, the then price affordability of the technology used. Description of the course and the results of testing, including description of the mathematical solution of the issue, are to be found in Report No. 262/97 developed by the Brown Coal Research Institute [2].
In 2006 North Bohemia Mining Company PLC launched a research project titled “GPS-Aided Determination of the Position of the Bucked Wheel of the K800/103/N1 Excavator”. A project was developed, in which all the components of the system were designed, including their positions, as well as systems of data transfers and data evaluation. All the needed components were purchased so that it might be possible (contrary to the testing in 1997) to test the system on a long term basis.
The system consists of three basic elements [6]:
•Measurement segment (DGPS, inertial sensors, control unit)
•Communication segment (radio communication for reception and transmission of data)
•User segment (evaluation software)
The measurement segment consists of 2 DGPS devices Trimble DSM 232, 2 inclinometers and one incremental rotation speed sensor. Corrections for DGPS are transferred from the reference station to the excavator employing a radio-modem. The operation of the entire system is controlled by a control unit. The position of the centre of the bucket wheel axis is computed from X,Y,Z coordinates acquired from the GPS devices and on the basis of sensors’ data (inclinations, rotation speeds) on a 5-second basis. Using radio-modems, the data is transmitted to the headquarters building of the Surveying and Geology Department, where it is saved. Then the data is processed by evaluation software (KVAS Prognosis Models). The system has been operated since December 2006.

The Present Day Progress of the Research Programme
The data transferred is saved in database file *.DB. All the values measured are saved in this database. On a five-second basis the database should be updated with a series of newly measured values. The first tools have already been developed in the “Prognosis Model” programme for visualisation of the excavator and utilisation of the results of computation of the position of the centre of the bucket wheel axis.
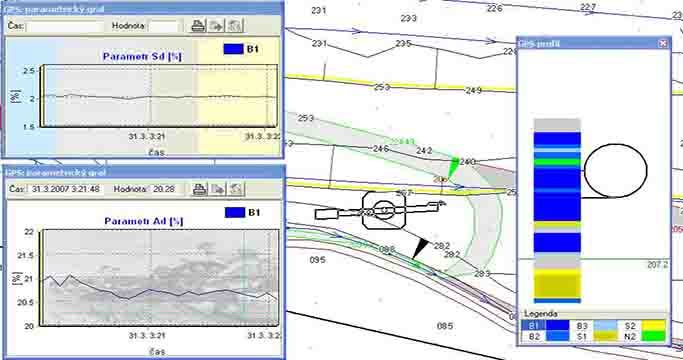
For more than 15 years Nastup Tusimice OpCo has been using the KVASoftware company products (3, 4 and 5), which have been serving for creation of the digital model of the mine. The surface layout of the mine as well as positions of underground geological layers are updated on a regular basis. On the basis of system of wells, qualitative parameters of coal are additionally computed for all sites where the model has been developed. The Prognosis Model utilises this. The section of digital operational map in Fig. 4 shows the position of schematized K800/103 excavator. On the right hand side, the vertical geological profile is shown in simplified terms. The position of the bucket wheel in relation to the profile in the relevant site can be seen. The individual types of coal are colour–discerned on the basis of qualitative parameters. The current status and the history of qualitative parameters of the coal (ash content Ad and sulphur content Sd), as derived from the model, can be seen in the left part of the figure.
The measured data also serves for detailed analysis of the entire process. The analysis is developed by the Institute of Geodetics and Mine Surveying of the University of Mining Technology – VSB Ostrava. The following is carried out in particular:
•Analysis of data transfer (number of measurements received)
•Analysis of accuracy of individual meters
o Analysis of gross errors
o Analysis of the mean errors of individual measurements and identification of the critical point
o Comparison of computed mean errors with values identified by the manufacturers of all the used meters
•Analysis of the accuracy of the calculation of the bucket wheel axis centre (mean error propagation)
•Analysis of data during operation of the excavator
The first results of data analyses show that it will be necessary to ensure better quality transfer of corrections from the base to the excavator and vice versa – currently the success rate is mere some 90%. This, consequently, has a negative impact on the accuracy of the GPS measurements as, unless the DGPS receives corrections, it switches to a “navigation regime” – with compromised precision hence.