
Источник: Источник: XIII Международный Конгресс Будапешт, Венгрия, от 24-го по 28-ое сентября 2007 года.
1. Введение
Глобальная Позиционная Система (GPS) спутниковая система для отождествления позиции и времени на Земной поверхности и прилегающем пространстве. Спутники передают сигналы, которые получают приемники и обрабатываются для маркшейдерских и навигационных целей. Главное преимущество системы в том, что спутниковая система дает информацию независимо от погодных условий, круглосуточно и в любой точке земли. В течение последних двух десятилетий спутниковая технология быстро развивается по всему миру, что привело к использованию технологии GPS во многих отраслях - кроме военного сектора. В поверхностной горнодобывающей промышленности система GPS, оказывается полезной главным образом при решении классических задач маркшейдерии и мониторинга движений транспортных средств. Теперь исследуются возможности для использования технология GPS также для усовершенствования процессов в горной промышленности.
2 Использование GPS для Определения Положения Роторного Экскаватора
Главные возможности для использования GPS в пределах рудников:
•Маркшейдерия (расположение и картография рудников, ГИС, прослеживание)
•Геология (расположение и рассмотрение колодцев, расположение геологических элементов)
•Геотехника (контролирование стабильности наклонов)
•Усовершенствование процесса в горной промышленности
•Модификации поверхностей и их восстановления.
•Контролирование движений транспортных средств и т.д.
Очевидно, что, если трехмерное положение элементов раскопок оборудования для горнодобывающей промышленности и связанных добывающих механизмов может быть определено относительно точно, многократная задача может быть успешно решена в системах контроля этих аппаратных средств. Карьеры по добыче бурого угля заинтересованы в разработке следующих тем, имеющих первостепенный интерес:
•Усовершенствование процесса контроля операции экскаватора (например прогнозы качественных параметров добываемого угля)
•Вычисления объемов добытых материалов в режиме реального времени.
•Очень точный контроль создания плана движения экскаватора и непосредственного контроля целей горной промышленности.
•Контроль и проверка связанных механизмов горной промышленности (например бульдозеров).
Контроль и проверка деятельности бульдозеров были решены удовлетворительно. Автоматизированная система для усовершенствования земельных работ комбинирует технологию GPS (работающий с сантиметровой точностью) и контролирует в кабинах встроенное компьютерное обеспечение аппаратных средств, таким образом получаем точную информация о параметрах/переменных возвышения и склонах в рабочем месте. Эта система оказывает существенное воздействие на качество работы и общей производительности/эффективности. Что идеально подходит для использования в горных выработках, вовремя дорожного строительства, работ на поврежденных участках поверхности и в течение восстановления земных поверхностей. Более быстрая и более точная навигация, которую реализует эта система, позволяет машинам выполнить разработанные задачи с первой попытки, без дорогостоящих дополнительных модификаций. Команды машин могут работать с большими уровнями доверия и более эффективно. Большое количество проданных бульдозеров позволяют объединить системы, и большинство фирм-изготовителей бульдозеров обеспечивает это решение на более или менее достойном уровне. С роторными экскаваторами ситуация более сложна. В таких случаях необходимо индивидуально работать с каждой машиной, и система должна быть создана для конкретного типа экскаватора. В Германии, в угольном бассейне Rhineland, разработка технологии GPS для экскаваторов, началась в 1985 году (при сотрудничестве с профессором Сибер из Ганноверского Университета, на эксковаторе в рудниках Frimmersdorf). Относительно многообещающие результаты экспериментов, проведенных, на одном экскаваторе в рудниках Bergheim в 1999 году закончились проектированием обширного проекта по имени SATAMA (1). В конце 1995 некоторые компоненты этой идеи были проверены на шаблонных операциях. Экспертной общественности сообщали о результатах этого проекта через специализированные журналы (например “Горная промышленность карьеров”).
Еще до попыток Северного угольного бассейна бурого угля Богемии, первые реальные попытки использования технологии GPS для определения положения ковша были сделаны в 1997 Северной Компанией Горной промышленности Богемии – Nastup Tusimice (“OpCo”). По сравнению с ситуацией в угольном бассейне Rhineland ситуация усложнена фактором, что большинство экскаваторов оборудовано расширенным ковшом. Следовательно должна появиться другая переменная и быть оценена. В рудниках Libous, были проведены испытания, при взаимодействии с Научно-исследовательским институтом бурого угля PLC, устройств GPS, сделанных Ashtech, Inc (Z-12) и Trimble Navigation Ltd. (Trimble 7400 Msi), эти устройства предоставлялись тогдашними продавцами.Эксперименты были нацелены на испытание удобства и простоты использования системы GPS в реальных полевых условиях. Определение пункта центра оси ковша было первичной целью. Испытание происходило 22 июля 1997 (10:30 – 13:30 Летнее Центрально-европейское время) и 23 июля 1997 (9:00-12:30 Летнее Центрально-европейское время). Во время наблюдения, экскаватор работал непрерывно, с краткосрочными (30-минутными) отключениями электричества во всех профилях технологических цепей. Результаты были многообещающими, и подходящее расположение устройств GPS было проверено. Впоследствии, эксперименты были прекращены из-за большой стоимости используемой технологии. Описание курса и результатов испытания, включая описание математического решения проблемы, можно найти в Отчете 262/97 созданного Научно-исследовательским институтом бурого угля [2].
В 2006 Северная Компания Горной промышленности Богемии PLC начала научно-исследовательскую работу, названную “ GPS помощь в определение положения ковша экскаватора модели K800/103/N1”. Проект был развит с учетом, что все компоненты системы были спроектированы, включая их положения, так же как системы передач данных и оценки данных. Все необходимые компоненты были приобретены так, чтобы была возможность (вопреки испытанию в 1997) проверить систему на долгосрочном основании.
Система состоит из трех основных элементов [6]:
•сегмент измерений (DGPS, инерциальные датчики, устройство управления)
•сегмент коммуникации (радио- коммуникация для приема и передачи данных)
•пользовательский сегмент (программное обеспечение вычислений)
Сегмент измерений состоит из 2 устройств DGPS с общей картой памяти Trimble 232, двух инклинометров и одного возрастающего датчика скорости вращения. Поправки на DGPS передаются со станции на экскаватор, использующего радио-модем. Операции всех систем контролируются блоком управления. Положение центра оси ковша вычислено от X, Y, Z координат, переданных устройствами GPS и на основе данных датчиков (уклона, скорости вращения) с 5 секундным интервалом. С помощью радио-модемов, данные переданы к зданию штаб-квартиры маркшейдерского и геологического отделов, где они хранятся. Затема данные обрабатываются программным обеспечением оценки (Модели Прогноза KVAS). Система работает с декабря 2006.

Прогресс исследовательской программы в наши дни
Переданные данные сохраняются в файле с расширением *.DB базы данных. Все ценные измерения заложены в этой базе данных. При поступлении новой информации обновляется пять вторых базы. Первые инструменты были уже созданы в программе «Модели Прогноза» для визуализации экскаватора и использования результатов вычисления положения центра оси ковша.
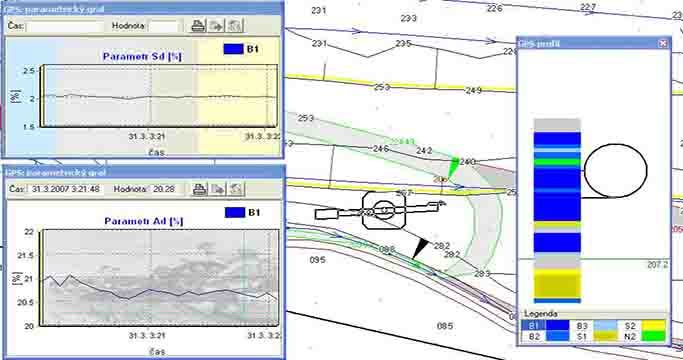
В течение больше чем 15 лет Nastup Tusimice OpCo использовал продукцию компании KVASoftware (3, 4 и 5), которые служили для создания цифровой модели рудников. Поверхностное расположение рудников так же как положение подземных геологических слоев регулярно обновлялись. На основе системы колодцев, качественные параметры угля дополнительно вычислены для всех мест, где модель была развита. Все выше перечисленное реализует модель прогноза. Секция цифровой эксплуатационной карты на рис. 4 показывает положение схематизированного экскаватора K800/103. Справа, вертикальный геологический профиль показывают в упрощенных схемах. Положение ковша относительно профиля в соответствующем месте может быть установлено. Индивидуальные типы угля различаются цветом на основании качественных параметров.Текущий статус и история качественных параметров угля, которые получают из модели, можно увидеть в левой части рисунка.
Измеренные данные также служат для детального анализа всего процесса. Анализ производился институтом геодезии и маркшейдерии университета добывающей технологии – VSB Острава. Следующее выполнено в особенности:
•Анализ передачи данных (число полученных замеров)
•Анализ точности индивидуальных замеров
o Анализ грубых ошибок
o Анализ средних ошибок индивидуальных замеров и идентификации критических пункта
o Сравнение вычисленных средних ошибок
•Анализ точности вычисления центра оси ковша (означают ошибочное позиционирование)
•Анализ данных во время работы экскаватора
Первые результаты исследований полученных данных показывают, что будет необходимо обеспечить улучшенную передачу исправлений с опорного пункта на экскаватор и наоборот. Это первостепенная задача. Это, следовательно, имеет отрицательное влияние на точность измерений GPS как, если DGPS не получает исправления, переключается на “навигационный режим” – с поставленной под угрозу точностью .