
|
|
Kol'ba Konstantine |
Faculty:Institute of Mining and Geology | |
Speciality: Geoinformatics and Surveying | |
Theme of master's work:Research of technology of basic data's treatment of buildings and structures surface laser scan-out | |
Scientific adviser: Germonova Ekaterina |
| Об авторе Библиотека Ссылки Отчет о поиске Индивидуальный раздел |
Summary on the exhaust ofIntroductionLaser scanning, having appeared on the Ukrainian market of geodetic services about 10 years ago, gradually finds application in addressing a growing range of tasks. This - the operational control of construction of engineering structures and monitor their condition during the operation, the creation or restoration of drawings, 3D-modeling of complex architectural structures. All this can be used to create three-dimensional content of geoinformation systems. The essence of technology is to determine the spatial coordinates of points on the surface of the object. This is accomplished by measuring the distances to all points determined by the laser rangefinder reflectionless (Fig. 1)[1]. Every measurement beam range finder deviates from its previous position, so that pass through a node of some imaginary normal grid, also called scanning matrix. The number of rows and columns can be adjusted. Higher point density matrix, the higher the density of points on the object surface. Measurements are made at very high speeds - thousands, sometimes tens of thousands of measurements per second. The device, which implements in practice the technology contained measurement is called a laser scanner. The result of scanner is the set of points with the calculated three-dimensional coordinates. These sets of points are called point cloud, or scan. Typically, the number of points in a single cloud can vary from a few hundred thousand to several million. 
Figure 1 - The principle of laser scanner Background and purposeThe task of creating architectural drawings arises when solving a number of tasks, including the construction of new facilities in existing buildings, renovation of existing buildings, creation of information and search engines etc. Most of the main methods for obtaining architectural drawings is a direct measurement using rulers and measuring tapes, surveying techniques and photogrammetric methods. The advent of terrestrial laser scanning made it possible to improve such problems as: control assembly measurements executive survey in the construction of engineering structures, monitoring the horizontal and vertical deformations, etc. A major trend today is the transition from two-dimensional drawings to three-dimensional 3-D models and the desire of many designers have a geometrically correct 3-D model of the building. However, to date there is no complete method of constructing 3-D models based on ground-based laser scanning. Therefore, the aim of my research is to study the technology of processing input data terrestrial laser scanning buildings. Alleged scientific noveltyThe development of the latest technologies in various fields of science, technology and production clearly demonstrates the improvement of methods of collecting data and constructing digital models of objects and terrain, aimed at improving the accuracy and reality. Automating processes and reducing cost. These methods include: aerial and satellite imagery and ground-based stereo photography, aerial and ground-based laser scanning and GPS-survey. Variety of methods of data collection allows us to offer various technological schemes used to construct three-dimensional models of objects. At the moment, for three-dimensional modeling facilities and territories have developed different approaches, different accuracy, detail, geographical coverage and cost. The most promising technology for constructing three-dimensional terrain models and objects are the technology of terrestrial laser scanning, as they have several advantages: have a large amount of redundant information due to the overlap of scans, there is the possibility of almost complete automation of work. This technology appeared relatively recently had not yet gained popularity due to its low at the expense of knowledge, but the development of this technology will significantly reduce labor costs compared to traditional methods of constructing three-dimensional models. Expected scientific resultsThe work will be to develop methodology for a full complex of works on the application of terrestrial laser scanning of the installation device to obtain 3-dimensional model of a building or structure. The final conclusions of the study will be done by December 2010. Review of research and development onThe technology of laser scanning becomes the world's increasing popularity. Much progress has been made in the ground laser scanners in the past decade. The number of scanners is now considerably increased, which can measure the millions of 3-D points in minutes. [2] Although it is generally describing a dense three-dimensional surface data for selected objects can be obtained only by using a fixed number of points worth mentioning that existing commercial systems are being developed that will get tight, Large-scale 3-D point clouds from terrestrial laser scanning with the moving platforms [2]. The technology of laser scanning is an accurate and efficient way of collecting and presenting spatial data on terrain, it provides a rich and reliable information on the basic design of buildings, can monitor changes, etc. In addition, one of the main advantages of this technology is that the point cloud is determined to measure the same as that existing in the real world. This technology enables high accuracy three-dimensional images that can be used in solving several problems: - Surface and volume problems of calculation; - create topographic maps, which describe the contour boundaries of objects and features of the contour area; Optical system of laser scanning based on the transfer of a moving laser beam reflected from the surface of the object. The object is illuminated by a laser beam, and identifies the point, and then recognized and accepted by the host system of the scanner. For each point is determined by the distance in a certain direction. For each point can be calculated coordinates X, Y and Z are given to the internal coordinate system of the laser scanner. One of the parameters that affect the accuracy of each point in the cloud, compared to the other is a "spot" laser beam. Accuracy is improved if the spot size decreases. Other parameters that affect the accuracy of each point: distance, angle of incidence of the laser beam, surface properties, etc. In Ukraine, terrestrial laser scanning technology also tend to actively develop. So for example the Kharkiv plant "Navigation geodesic center" has a number of problems are solved using terrestrial laser scanning technology, namely the use of laser scanning for the scanning of architectural monuments, historic buildings and monuments. The result of such work may be data on the deformation structures, the state of the external design, preparation of materials for the reconstruction. Not by accident the first object on which the works on laser scanning, were caves of Kiev-Pechersk Lavra. It is hard to imagine a more technology makes it possible to perform accurate measurements in narrow, unlit corridors of the caves (Fig. 2).[3]. 
Figure 2 - Fragment of models caves of Kiev-Pechersk Lavra Is widely used in laser scanning in the construction and reconstruction of buildings and structures. With only a few scans, you can quickly determine whether the elements of the construction project, calculate the deviations from the specified dimensions. Scanning the interior of industrial facilities can solve the problem of calculating the volume, placement of bulky equipment, is the scheme of utilities within the building. Interesting possibilities give crawl in assessing damage, surface deformation monitoring of landslides, assess the impact of emergency and catastrophic accidents. In the Donetsk National Technical University of the matter dealt with Master Chair of Geoinformatics and Surveying Vracheva Anna, the theme of her work was to analyze the methods and technologies geodetic terrestrial laser scanning. In general, surveys with terrestrial laser scanner can be divided into two main parts: a directly self scanning and postprocessing the data sets. In turn, the second of three phases of work: merging scans - usually during the shooting object is carried out several scans to fully cover the surface. To create a single scan is necessary to make the union (matching). There are many methods for matching scans, with varying degrees of automation. Often used in the method of combining scans of control points, which are displayed on adjacent scans. As such points can be used by special prisms, reflective plate or sticker with a higher reflectivity and therefore is uniquely determined. transformation of coordinates - for an accurate picture of our future drawing or diagram should specify certain common coordinate system. The coordinate of each scan produced a certain point in the center of the measuring head scanner and of course, whenever you change its position, it changes its position in the spatial coordinate system. For the connection of an object obtained from different scans, you must select a single system of coordinates, defined in its center scan for each case (eg, using an electronic total station) and to transform all the coordinates obtained in a single system. Creating surfaces - the most complex and most basic processing. View-point clouds mathematically describe surfaces. If the scan is accompanied by a digital video or photography, then at the stage of processing, you can combine the scanned image of the object with his video image, giving a scan of the actual color and texture. There are different algorithms of the planes determination. In particular, Andreas Rietdorf in his paper “Automatisierte Auswertung und Kalibrierung von scannenden Messsystemen mit tachzmetrischem Messprinzip” (Munhen 2005) [4] as a criterion for the decision, if the points lie on the plane, fulfilled the determinant calculation. There are correspondingly analyzed two adjacent triangles that rather precisely determine the plane. According to his paper, to each face of the triangle there should be found two further faces that have a common point with the first face. Thus, there exist 4 points determining the parallelepiped. If the mixed product of three vectors made by four points equals zero, then these four points lie on the one and the same plane. Thus, belonging of any point to the plane is determined from the equality to the zero of the determinant made by the three vectors: 
where Let us examine another algorithm. Let us assume that there is an Х, matrix, consisting of the points coordinates in the XYZ space. Let us check if these points belong to the plane. For this we transform them in such a way that they wholly lie on the XY plane. Then for all points belonging to the plane, a z coordinate will be equal 0. In the event that any point does not belong to the plane, then the 
Let us examine the coordinates transformation of the points forming the 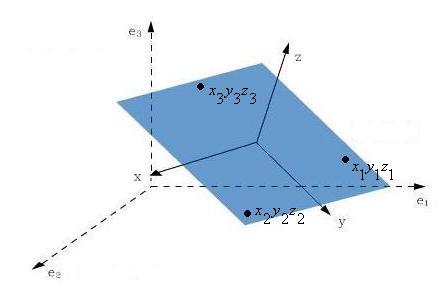
Figure 3 - Transformation of the plane points coordinates, here: coordinates system Let us deduct from each coordinate of the  (1) (1)
where  - the number of processed points - the number of processed points  , where , where  - the number of points. - the number of points.
By multiplying the Let us explain the necessity of the proper vectors determination. The task of the coordinates transformation can be reduced to the basis transformation. For this purpose each point of the A matrix should be considered as a vector. Then, according to the definition, a set of the space vectors is called an operator. The basis transformation results into two different matrixes corresponding to one and the same operator, i.e. similar ones. These similar matrixes are connected between each other by the following ratio:  (2) (2)
where
If the eigenvalues of the  (3) (3)
Because the algorithms the most complete, is the second algorithm by the algorithm can take into account more accurately described by the roughness of surfaces The resultsI have made an analysis of various technologies for construction of three dimensional objects based on various types of surveys, examined the possible algorithms for constructing three-dimensional objects by characteristic points. There have been scanning the room scanner company Riscan, received the scans were transformed into a unified system of coordinates. Statistical analysis was performed in the accompanying software Riscan Pro. ConclusionDuring the research I have studied different techniques of constructing three-dimensional objects, considered methods of implementation of terrestrial laser scanning, a comparison with classical techniques filming areas, buildings and structures. The analysis algorithms of three-dimensional terrain models of buildings and structures. In the process of research produced by terrestrial laser scanning technology has shown itself with the positive side, it is very promising due to the large reduction in labor costs, and high accuracy of the result.List of sources
|
 the coordinates of points uniquely determine a plane.
the coordinates of points uniquely determine a plane. matrix will be inclined onto a some angle. The point with the maximum z coordinate modulus will be false and needs to be excluded from further calculations. The calculations are made until
matrix will be inclined onto a some angle. The point with the maximum z coordinate modulus will be false and needs to be excluded from further calculations. The calculations are made until – this is a system where the plane lies; x, у, z coordinates system y, z – this is a system where the points lies in the xy plane.
– this is a system where the plane lies; x, у, z coordinates system y, z – this is a system where the points lies in the xy plane.  ) of each coordinates. We will receive an
) of each coordinates. We will receive an  matrix, all points of which will be spread towards the center of gravity:[5]:
matrix, all points of which will be spread towards the center of gravity:[5]:  - the coordinates of points being processed;
- the coordinates of points being processed; we will receive a symmetric
we will receive a symmetric  matrix. This is required to define eigenvectors (
matrix. This is required to define eigenvectors ( – the transformed matrix of coordinates of points;
– the transformed matrix of coordinates of points;