
|
|
Кольба Костянтин Вікторович |
Інститут горного діла та геології | |
Спеціальність: Геоінформаційні системи та технології | |
Тема випускної роботи:Дослідження технології обробки вихідних даних наземного лазерного сканування будівель і споруд | |
Науковий керівник: Гермонова Катерина Олександрівна |
| Об авторе Библиотека Ссылки Отчет о поиске Индивидуальный раздел |
Реферат по темі випускної роботиВведенняЛазерне сканування, з'явившись на українському ринку геодезичних послуг близько 10 років тому, поступово знаходить застосування при вирішенні все більшого кола завдань. Це - оперативний контроль будівництва інженерних споруд та моніторинг їх стану при експлуатації, створення або відновлення креслень, 3D-моделювання складних архітектурних об'єктів. Все це може бути використано для створення тривимірного інформаційного наповнення геоінформаційних систем. Суть технології полягає у визначенні просторових координат точок поверхні об'єкту. Це реалізується за допомогою вимірювання відстані до всіх визначених точок за допомогою лазерного далекоміра безвідбивачевого (мал.1)[1]. При кожному вимірюванні промінь далекоміра відхиляється від свого попереднього положення так, щоб пройти через вузол якоїсь уявної нормальної сітки, званої ще скануючої матрицею. Кількість рядків і стовпців матриці може регулюватися. Чим вище щільність точок матриці, тим вище щільність точок на поверхні об'єкту. Вимірювання проводяться з дуже високою швидкістю - тисячі, а часом і десятки тисяч вимірів за секунду. Прилад, що реалізує на практиці наведену технологію вимірювань, називається лазерним сканером. Результатом роботи сканера є безліч точок з обчисленими тривимірними координатами. Такі набори точок прийнято називати хмарами точок або сканів. Звичайно кількість точок в одному хмарі може варіюватися від декількох сотень тисяч до декількох мільйонів. 
Малюнок 1 - Принцип роботи лазерного сканера Актуальність і метаЗавдання створення архітектурних креслень виникає при вирішенні цілого ряду завдань, серед яких будівництво нових об'єктів в умовах існуючої забудови, реконструкція існуючих будівель, створення інформаційних і пошукових систем та ін. Найчастіше основними методами для отримання архітектурних креслень є безпосередні вимірювання за допомогою лінійок і вимірювальних стрічок, геодезичні методи і фотограмметричні методи. Поява систем наземного лазерного сканування дало можливість удосконалення таких завдань як: Контроль монтажних вимірювань, виконавча зйомка при будівництві інженерних споруд, спостереження за горизонтальними і вертикальними деформаціями і т.д. Основною тенденцією на сьогоднішній день є перехід від двомірних креслень до просторових 3-х мірним моделями і бажання багатьох проектувальників мати геометрично правильну 3-х мірну модель будівлі. Проте на сьогоднішній день немає повної методики побудови 3-х мірних моделей за результатами наземного лазерного сканування. Тому метою моєї наукової роботи є дослідження технології обробки вихідних даних наземного лазерного сканування будівель і споруд. Передбачувана наукова новизнаРозвиток останніх технологій в різних галузях науки, техніки та виробництва явно демонструє вдосконалення методів збору даних та побудови цифрових моделей об'єктів і рельєфу місцевості, спрямоване на підвищення їх точності і реальності. Автоматизацію процесів та зменшення вартості робіт. До таких методів належать: аеро-і космічна зйомка і наземна стереофотограмметріческая зйомка, повітряне та наземне лазерне сканування та GPS-зйомка. Різноманіття методів збору даних дозволяє запропонувати різні технологічні схеми їх використання для побудови тривимірних моделей об'єктів. На даний момент для тривимірного моделювання територій та об'єктів розроблені різні підходи, що розрізняються точністю, детальністю, територіальним охопленням і вартістю. Найбільш перспективними технологіями побудови тривимірних моделей місцевості та об'єктів є технології наземного лазерного сканування, так як вони мають ряд переваг: мають великий обсяг надлишкової інформації за рахунок перекриття сканів, є можливість практично повної автоматизації робіт. Дана технологія, з'явившись порівняно недавно ще не набула належну популярність за рахунок своєї малої вивченості, але розвиток даної технології призведе до значного скорочення трудовитрат у порівнянні з традиційними методами побудови трьох мірних моделей. Плановані наукові результатиРРезультатом роботи буде розробка методики проведення повного комплексу робіт із застосування наземного лазерного сканування від встановлення приладу до отримання 3-х мірної моделі будівлі або споруди. Остаточні висновки за результатами дослідження планується зробити до грудня 2010р. Огляд досліджень і розробок по теміТехнологія лазерного сканування набуває у світі все більшої популярності. Великий прогрес був досягнутий в області наземних лазерних сканерів протягом останнього десятиліття. Число сканерів в даний час значно зросла, які дозволяють вимірювати мільйони 3-D точок за лічені хвилини. [2] Хоча зазвичай опису щільної поверхні трьохмірних даних, отриманих для вибраних об'єктів можна отримає лише за допомогою фіксованої кількості точок, варто відзначити, що існуючі комерційні системи перебувають у стадії розробки, які дозволять отримувати щільні, Крупно-масштабні 3-D хмари точок від наземного лазерного сканування за допомогою рухомих платформ [2]. Технологія лазерного сканування є точним і ефективним способом збору і подання просторових даних на місцевості; вона надає багату і достовірну інформації про базової конструкції будівель, дозволяє стежити за змінами, ін. Крім того, одним з основних переваг цієї технології є те, що точка хмари визначається у вимірі та ж, що й існуюча в реальному світі. Ця технологія дозволяє отримати високу точність трьох мірного зображення, які можуть бути використані у вирішенні низки завдань: - поверхневі та об'ємні завдання розрахунку; - створення топографічних карт, які описують контурній особливості меж об'єктів та контуру місцевості; Оптичні системи лазерного сканування засновані на передачі рухомого лазерного променя, що відбивається від поверхні об'єкту. Об'єкт висвітлюється лазерним променем і ідентифікує крапку, а потім відбивається і приймається приймаючої системою сканера. Для кожної окремої точки визначається відстань у відомому напрямку. Для кожної точки можуть бути обчислені координати X, Y і Z приведені до внутрішньою системою координат лазерного сканера. Одним з параметрів, який впливає на точність кожної точки в хмарі, у порівнянні з іншою це "плями" лазерного променя. Точність поліпшується, якщо розмір плями зменшується. Інші параметри, які впливають на точність кожної точки: відстань, кут падіння лазерного променя, властивості поверхні і т.д. В Україні технології наземного лазерного сканування також мають тенденції до активного розвитку. Так наприклад харківське підприємство «Навігаційний геодезичний центр» ставить перед собою ряд завдань вирішуються за допомогою технології наземного лазерного сканування, а саме застосування лазерного сканування для роботи по скануванню пам'яток архітектури, історичних будівель і монументів. Результатом виконання таких робіт можуть бути дані про деформації споруд, стан зовнішнього оформлення, підготовка матеріалів для виконання відновних робіт. Не випадково першим об'єктом, на якому виконувалися роботи по лазерному скануванню, стали печери Києво-Печерської Лаври. Важко уявити, яка ще технологія дозволяє виконати високоточні вимірювання у вузьких і неосвітлених коридорах печер (мал. 2)[3]. 
Малюнок 2 - Фрагмент моделей печер Києво-Печерської Лаври Широке застосування знаходить лазерне сканування при будівництві та реконструкції будівель і споруд. Виконавши всього кілька сканів, можна швидко визначити відповідність елементів споруди проектом, обчислити величини відхилень від заданих габаритів. Сканування внутрішніх приміщень промислових об'єктів дозволяє вирішувати задачі розрахунку обсягу, розміщення великогабаритного обладнання, складати схеми інженерних комунікацій усередині будівлі. Цікаві можливості дає сканування в сфері оцінки руйнувань, деформацій поверхонь, спостереженні за зсувами, оцінки наслідків аварійних і катастрофічних подій. У Донецькому Національному Технічному Університеті даним питанням займалася магістр кафедри геоінформатики та геодезії Врачева Ганна Олександрівна, темою її роботи був аналіз методів і геодезичних технологій наземного лазерного сканування. У цілому зйомку за допомогою наземного лазерного сканера можна розділити на дві основні частини: безпосередньо саме сканування і постобробку отриманих наборів даних. У свою чергу в другій частині можна виділити три етапи робіт: зшивання сканів - Як правило, під час зйомки об'єкту, проводиться декілька сканів для повного покриття поверхні. Для створення єдиного скана необхідно провести об'єднання (зшивання). Існує безліч методів зшивання сканів, з різним ступенем автоматизації. Часто використовується метод поєднання сканів по опорних точках, які відображаються на суміжних сканів. В якості таких точок можуть бути використані спеціальні призми, світловідбиваючі пластини або наклейки, які мають більш високий коефіцієнт відбиття і тому цілком однозначно визначаються. трансформування координат - для точного уявлення нашого майбутнього креслення або схеми необхідно завдання певної єдиної системи координат. Початок системи координат кожного окремого скана, виробленого з певної точки, знаходиться в центрі вимірювальної головки сканера і зрозуміло, при кожній зміні його положення, воно змінює своє положення у просторовій системі координат. Для зв'язку координат об'єкту, отриманих з різних сканів, необхідно вибрати єдину систему координат, визначити в ній центр сканування для кожного випадку (наприклад, за допомогою електронного тахеометра) і трансформувати всі отримані координати в єдину систему. Створення поверхонь - Найбільш складний і самий основний процес обробки. Представлення-облікової точок математично описуваними поверхнями. Якщо сканування супроводжується цифрової відео-або фотозйомкою, то на етапі обробки можна поєднати відскановане зображення об'єкта з його відео зображенням, надавши скан реальні кольору і текстуру. Існують різні алгоритми визначення площин. Зокрема Andreas Rietdorf у своїй роботі «Automatisierte Auswertung und Kalibrierung von scannenden Messsystemen mit tachzmetrischem Messprinzip» (Munhen 2005) [4] в якості критерію для вирішення, чи лежать точки на площині, виконував розрахунок визначника. Досліджуються відповідно два суміжні трикутника, які досить точно визначають площину. Згідно з його роботи, до кожної грані трикутника повинні шукатися дві наступні межі, які мають спільну точку з першою. Таким чином, існують 4 точки, які визначають паралелепіпед. Якщо змішані добуток трьох векторів, утворених чотирма точками, дорівнює нулю, то ці чотири точки лежать в одній площині. Таким чином, приналежність якої-небудь точки площині визначається з рівності нулю визначника утвореного трьома векторами: 
где Розглянемо інший алгоритм. Нехай є матриця 
Розглянемо перетворення координат точок складових матрицю 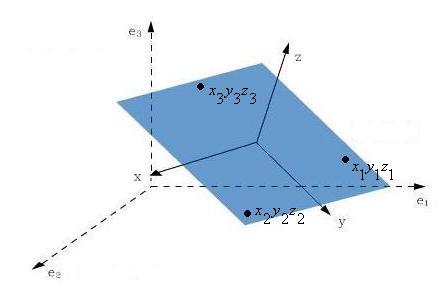
Малюнок 3 - Перетворення координат точок площини, тут: система координат Віднімемо з кожної координати матриці  (1) (1)
де  - кількість обрахованих точок - кількість обрахованих точок  , где , где  - кількість точок. - кількість точок.
Помножимо матрицю Пояснимо необхідність визначення власних векторів. Завдання перетворення координат можна звести до перетворення базису. Для цього кожну точку матриці  (2) (2)
де
Якщо власні числа матриці  (3) (3)
З розглянутих алгоритмів найбільш повним є другий алгоритм, за допомогою цього алгоритму можна врахувати більш точно нерівності описуваних поверхонь. Отримані результатиМною здійснено аналіз різних технологій побудови трьох мірних об'єктів за результатами різних видів зйомок, розглянуті можливі алгоритми побудови тривимірних об'єктів по характерних точках. Було проведено сканування приміщення сканером фірми Riscan, отримані скани були трансформовані в єдину систему координат. Обробка результатів здійснювалася в супутньому програмному забезпеченні Riscan Pro. ВисновокУ ході досліджень мною були вивчені різні технології побудови тривимірних об'єктів, розглянуто методики виконання наземного лазерного сканування, виконано порівняння з класичними технологіями зйомок місцевості, будівель і споруд. Проведено аналіз алгоритмів побудови трьох мірних моделей місцевості будівель і споруд. У процесі вироблених досліджень технологія наземного лазерного сканування показала себе з позитивної сторони, вона є дуже перспективною за рахунок великого скорочення трудовитрат, і високої точності отриманого результату. Список джерел
|
 - координати точок які точно визначають площину.
- координати точок які точно визначають площину. , що складається з координат точок у просторі XYZ. Перевіримо, чи належать ці точки площині. Для цього перетворимо їх так, щоб вони повністю лежали в площині ХY. Тоді для всіх точок, що належать площині, координата z буде дорівнює 0. У разі якщо будь-яка точка не належить площині, то матриця
, що складається з координат точок у просторі XYZ. Перевіримо, чи належать ці точки площині. Для цього перетворимо їх так, щоб вони повністю лежали в площині ХY. Тоді для всіх точок, що належать площині, координата z буде дорівнює 0. У разі якщо будь-яка точка не належить площині, то матриця  – система, в якій знаходиться площину; система координат x, y, z - це система координат, в якій точки лежать в площині ху.
– система, в якій знаходиться площину; система координат x, y, z - це система координат, в якій точки лежать в площині ху.  ) по кожній з координат. Отримаємо матрицю
) по кожній з координат. Отримаємо матрицю  , всі крапки якої були розпорошені щодо центра ваги[5]:
, всі крапки якої були розпорошені щодо центра ваги[5]:  - координати обрахованих точок;
- координати обрахованих точок; отримаємо симетричну матрицю
отримаємо симетричну матрицю  . Це необхідно для знаходження власних векторів (
. Це необхідно для знаходження власних векторів ( – перетворена матриця координат точок;
– перетворена матриця координат точок;