А.А.Альемраят, студент 5-го курса;Руководитель:Толочко.О.И.
Донецкий национальный технический университет
Моделирование сложных механических систем в пакете DYMOLA/MODELICA
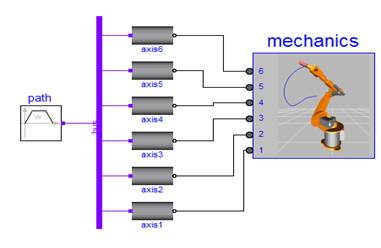
В последнее время повысился интерес к моделированию электро-механических систем со сложной кинематикой, например, роботов. Опыт показал, что, несмотря на наличие в пакете MATLAB приложения SimMechanics, моделирование таких систем вызывает затруднение. Поэтому актуальной задачей является выбор и использование более совершенного программного обеспечения.
Цель работы-
разработать методические указания по математическому моделированию электромеханических объектов в среде пакета Dymola с использованием алгоритмического языка Modelica.
Dymola переводится на русский язык как лаборатория динамического моделиро-вания. Она предназначена для моделирования физических объектов и включает в себя наборы библиотек для работы с математическими, электрическими, механическими системами, а так же библиотеку для моделирования тепловых процессов. Dymola ис-пользует объектно-ориентированный подход программирования, что позволяет удобнее создавать модели и быстрее осуществлять их расчет. В Dymola поддерживается графи-ческое отображение процессов, 3D анимация, симуляция в реальном времени, возмож-ность использования моделей, созданных в Dymola, в других программах для модели-рования, например, таких как MatLab.
Пакет Dymola (Dynamic Modeling Laboratory), поддерживающий язык модели-рования Modelica, является комплексным инструментом для моделирования и ис-следования сложных систем в таких областях, как мехатроника, автоматика, аэро-космические исследования и др.
Гибкость и открытость пакета Dymola дают пользователям возможность создавать свои собственные библиотеки моделей, описывая их на внутреннем языке описания блоков, или модифицировать уже существующие модели под свои конкрет-ные нужды.
Кроме собственного языка, Dymola (Modelica) поддерживает интеграцию с та-кими программными средами, как Fortran, С, Simulink, и некоторыми др.
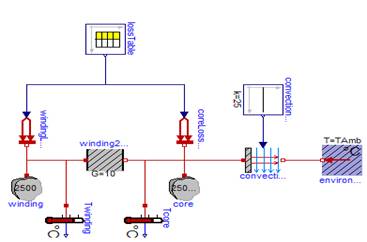
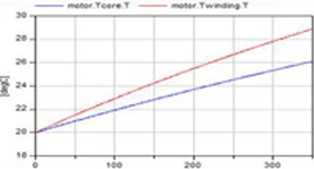
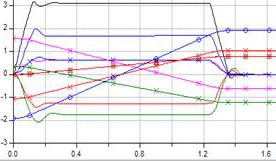
Примеры моделирования сложных механических систем в пакете Dymola.
.